俯仰运动控制过程框图
滚转运动控制过程框图
偏航运动控制过程框图
升降运动控制过程框图
前后运动控制过程框图
左右运动控制过程框图
定点悬停控制过程框图
网上资料:无人机飞控技术最详细解读
四旋翼无人机一般是由检测模块,控制模块,执行模块以及供电模块组成。检测模块实现对当前姿态进行量测;执行模块则是对当前姿态进行解算,优化控制,并对执行模块产生相对应的控制量;供电模块对整个系统进行供电。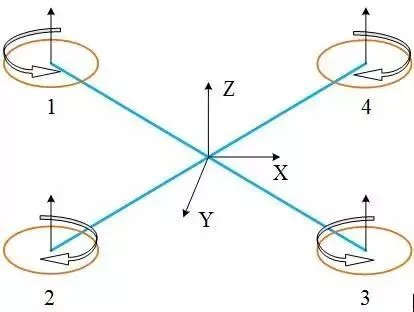
四旋翼无人机机身是由对称的十字形刚体结构构成,材料多采用质量轻、强度高的碳素纤维;在十字形结构的四个端点分别安装一个由两片桨叶组成的旋翼为飞行器提供飞行动力,每个旋翼均安装在一个电机转子上,通过控制电机的转动状态控制每个旋翼的转速,来提供不同的升力以实现各种姿态;每个电机均又与电机驱动部件、中央控制单元相连接,通过中央控制单元提供的控制信号来调节转速大小;IMU惯性测量单元为中央控制单元提供姿态解算的数据,机身上的检测模块为无人机提供了解自身位姿情况最直接的数据,为四旋翼无人机最终实现复杂环境下的自主飞行提供了保障。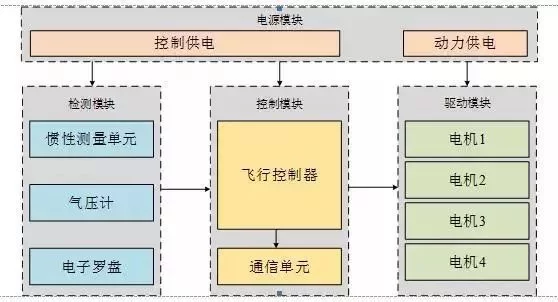
现将位于四旋翼机身同一对角线上的旋翼归为一组,前后端的旋翼沿顺时针方向旋转,从而可以产生顺时针方向的扭矩;而左右端旋翼沿逆时针方向旋转,从而产生逆时针方向的扭矩,如此四个旋翼旋转所产生的扭矩便可相互之间抵消掉。由此可知,四旋翼飞行器的所有姿态和位置的控制都是通过调节四个驱动电机的速度实现的。一般来说,四旋翼无人机的运动状态主要分为悬停、垂直运动、滚动运动、俯仰运动以及偏航运动五种状态。
悬停
悬停状态是四旋翼无人机具有的一个显著的特点。在悬停状态下,四个旋翼具有相等的转速,产生的上升合力正好与自身重力相等,即。并且因为旋翼转速大小相等,前后端转速和左右端转速方向相反,从而使得飞行器总扭矩为零,使得飞行器静止在空中,实现悬停状态。
垂直运动
垂直运动是五种运动状态中较为简单的一种,在保证四旋翼无人机每个旋转速度大小相等的倩况下,同时对每个旋翼增加或减小大小相等的转速,便可实现飞行器的垂直运动。当同时増加四个旋翼转速时,使得旋翼产生的总升力大小超过四旋翼无人机的重力时,即,四旋翼无人机便会垂直上升;反之,当同时减小旋翼转速时,使得每个旋翼产生的总升力小于自身重力时,即,四旋翼无人机便会垂直下降,从而实现四旋翼无人机的垂直升降控制。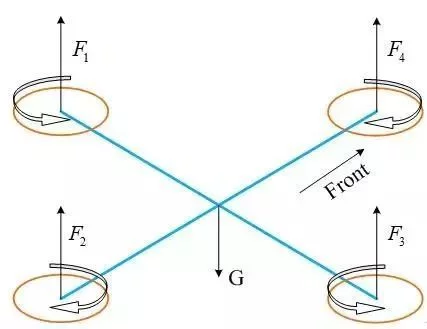
翻滚运动
翻滚运动是在保持四旋翼无人机前后端旋翼转速不变的情况下,通过改变左右端的旋翼转速,使得左右旋翼之间形成一定的升力差,从而使得沿飞行器机体左右对称轴上产生一定力矩,导致在方向上产生角加速度实现控制的。如图2.3所示,增加旋翼1的转速,减小旋翼3的转速,则飞行器倾斜于右侧飞行;相反,减小旋翼4,增加旋翼2,则飞行器向左倾斜飞行。
俯仰运动
四旋翼飞行器的俯仰运动和滚动运动相似,是在保持机身左右端旋翼转速不变的前提下,通过改变前后端旋翼转速形成前后旋翼升力差,从而在机身前后端对称轴上形成一定力矩,引起角方向上的角加速度实现控制的。如图2.4所示,增加旋翼3的转速,减小旋翼1的转速,则飞行器向前倾斜飞行;反之,则飞行器向后倾斜。
偏航运动
四旋翼的偏转运动是通过同时两两控制四个旋翼转速实现控制的。保持前后端或左右端旋翼转速相同时,其便不会发生俯仰或滚动运动;而当每组内的两个旋翼与另一组旋翼转速不同时,由于两组旋翼旋转方向不同,便会导致反扭矩力的不平衡,此时便会产生绕机身中心轴的反作用力,引起沿角角加速度。如图2.3所示,当前后端旋翼的转速相等并大于左右端旋翼转速时,因为前者沿顺时针方向旋转,后者相反,总的反扭矩沿逆时针方向,反作用力作用在机身中心轴上沿逆时针方向,引起逆时针偏航运动;反之,则会引起飞行器的顺时针偏航运动。
综上所述,四旋翼无人机的各个飞行状态的控制是通过控制对称的四个旋翼的转速,形成相应不同的运动组合实现的。但是在飞行过程中却有六个自由度输出,因此它是一种典型的欠驱动,强耦合的非线性系统。例如,旋翼1的转速会导致无人机向左翻滚,同时逆时针转动的力矩会大于顺时针的力矩,从而进一步使得无人机向左偏航,此外翻滚又会导致无人机的向左平移,可以看出,四旋翼无人机的姿态和平动是耦合的。
四旋翼无人机自主飞行的控制
四旋翼无人机的精确航迹跟踪是实现无人机自主飞行的基本要求。由于四旋翼无人机自身存在姿态与平动的耦合关系以及模型参数不确定性与外界扰动,因此只有实现姿态的稳定控制才能完成航迹的有效跟踪。
在四旋翼无人机的自主控制系统中,姿态稳定控制是实现飞行器自主飞行的基础。其任务是控制四旋翼无人机的三个姿态角(俯仰角、滚转角、偏航角)稳定地跟踪期望姿态信号,并保证闭环姿态系统具有期望的动态特性。由于四旋翼无人机姿态与平动的耦合特点,分析可以得知,只有保证姿态达到稳定控制,才使得旋翼总升力在期望的方向上产生分量,进而控制飞行器沿期望的航迹方向飞行。而四旋翼无人机的姿态在实际飞行环境中回受到外界干扰和不精确模型的参数误差、测量噪声等未建模动态对控制效果的影响。所以,需要引入适当的观测器和控制器对总的不确定性进行估计和补偿,并对其估计的误差进行补偿,来保证四旋翼无人机在外界存在干扰下对姿态的有效跟踪。
四旋翼无人机的姿态控制应根据其实际的工作特性以及动力学模型,进而针对姿态的三个通道(俯仰,翻滚和偏航)分别设计姿态控制器,每个通道中都对应引入相应的控制器,其流程如下所示。
广告三任前夫死后,她嫁给村里的大傻子壮壮,新婚之夜壮壮竟然…
此方法可以基本保证每个通道的实际姿态值跟踪上期望值。但是,在只考虑对模型本身进行控制时,没有考虑到外部不确定性对闭环系统的影响。微小型无人机在飞行时,由于机体较小,电机的振动较强,很容易受到外界环境的干扰。因此,整个通道中必然存在不确定因素,比如模型误差、环境干扰、观测误差等,这些不确定性将降低系统的闭环性能。所以在设计无人机控制系统时,必须要考虑系统的抗干扰性能,即闭环系统的鲁棒性。因此需要设计一定的干扰补偿器对干扰进行逼近和补偿,以实现姿态角的稳定跟踪。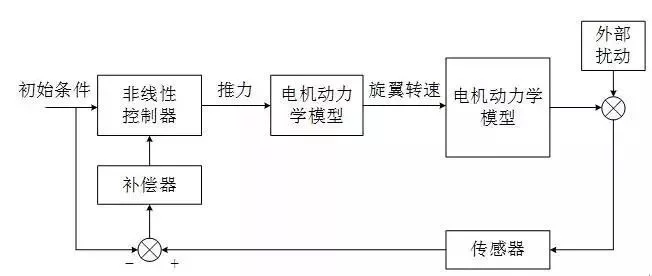
_广告_40岁主任提拔日记曝光,其中内容,令人瞠目结舌!
只有在保证飞机姿态可以保持稳定才能进一步讨论如何控制路径保持稳定,在时间尺度上进行分析,飞机的姿态角变化的频率要大于飞机位置的频率。所以,针对轨迹跟踪应当使用内外双环控制,内环控制姿态角,外环控制位置

若有收获,就点个赞吧
0 人点赞
