一、磁罗盘(磁航向仪)及其结构原理介绍
磁力计指的是各种用来测量磁场的仪器,也称磁力仪、高斯计。飞行器的机头朝向是指向哪个方位,这个状态量称为航向,也是飞行器三维姿态信息中的一维。磁力计通过测量大地的磁场强度可以获得载体的航向信息。磁力计之所以由于能够获得航向信息是因为地球空间周围有着磁场,磁场强度大约为0.5~0.6高斯,磁力计可以测量出穿过大地的三维地磁强度,从而获得载体相对于地磁线的偏转方位。
这种磁力计采用各向异性的磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。这种具有晶体结构的合金材料对外界的磁场非常敏感,磁场的强弱变化会导致AMR电阻值发生变化。在制造过程中,将一个强磁场加在AMR上使其在某一方向上磁化,建立起一个主磁域,与主磁域垂直的轴被称为该AMR的敏感轴;为了使测量结果以线性的方式变化,AMR材料上的金属导线呈45º角倾斜排列,电流从这些导线上流过;由初始的强磁场在AMR材料上建立起来的主磁域和电流的方向有45º的夹角。
强磁场方向
AMR合金
敏感轴
电流
合金薄膜
金属接头
磁化方向
AMR ELEMENT
角排列的导线
AMR材料示意图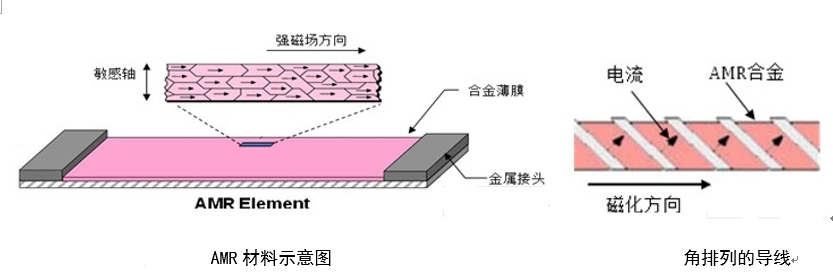
当有外界磁场Ha时,AMR上主磁域方向就会发生变化而不再是初始的方向了,那么磁场方向和电流的夹角θ也会发生变化。对于AMR材料来说,θ角的变化会引起AMR自身阻值的变化,并且呈线性关系。磁力计中再利用惠斯通电桥检测AMR阻值的变化,如图5-13所示。R1/R2/R3/R4是初始状态相同的AMR电阻,但是R1/R2和R3/R4具有相反的磁化特性。当检测到外界磁场的时候,R1/R2阻值增加∆R而R3/R4减少∆R。这样在没有外界磁场的情况下,电桥的输出为零;而在有外界磁场时电桥的输出为一个微小的电压∆V。 当R1=R2=R3=R4=R,在外界磁场的作用下电阻变化为∆R时,电桥输出∆V正比于∆R。
二、飞控系统中的磁罗盘(磁航向仪)
正如磁罗盘(磁航向仪)名称所示,磁罗盘能为无人机提供方向感。它能提供装置在 XYZ 各轴向所承受磁场的数据。接着相关数据会汇入微控制器的运算法,以提供磁北
极相关的航向角,然后就能用这些信息来侦测地理方位。
为了算出正确方向,磁性数据还需要加速度计提供倾斜角度数据以补强信息。有了倾斜数据加上磁性数据,就能计算出正确方位。
磁罗盘对于硬铁、软铁或运转角度都非常敏感。所谓硬铁是指传感器附近的坚硬、永久性铁磁性物质。 它能使罗盘读数产生永久性偏移。 软铁则是指附近有弱铁磁性物质,电路走线等。 它能让传感器读数产生可变动移位。
因此它也需要磁性传感器校正算法,以过滤掉这些异常状况。 这时候最重要的是让用户不必费力,运算法就能快速进行校正。
除了方向的感测,磁性传感器也可以用来侦测四周的磁性与含铁金属,例如电极、电线、车辆、其他无人机等等,以避免事故发生。
B VOUT+
若有收获,就点个赞吧

若有收获,就点个赞吧
0 人点赞
