一、陀螺仪及其结构原理介绍
陀螺仪传感器
陀螺仪又称为角速度传感器,用于检测旋转角速度的大小。角速度的单位deg/s(度/每秒)。
三轴陀螺仪动画
三自由度陀螺仪具有内、外两个框架,使转子自转轴具有两个转动自由度。在没有任何力矩装置时,它就是一个自由陀螺仪。陀螺仪作用于航空、航天、航海、兵器、汽车、生物医学、环境监控等领域。陀螺仪可以根据需要提供准确的方位、水平、位置、速度和加速度等信号。主要应用于:导航。配合GPS,手机的导航能力将达到前所未有的水准。实际上,目前很多专业手持式GPS上也装了陀螺仪,如果手机上安装了相应的软件,其导航能力绝不亚于目前很多船舶、飞机上用的导航仪。各类游戏的传感器,比如飞行游戏,体育类游戏,甚至包括一些第一视角类射击游戏,陀螺仪完整监测游戏者手的位移,从而实现各种游戏操作效果。可以用作输入设备,陀螺仪相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种类型。
MEMS陀螺仪有多种设计以及多种原理(内/外框架驱动式、梳状和电磁驱动式等)来实现陀螺仪的功能,但是基本上都是采用振动相互正交振动和转动引起的交变科里奥利力。它的基本原理为两个有质量的质量块运动速度方向相反,大小相同,所产生科里奥利力相反,从而压迫两块对应的电容板移动,产生电容差分变化。<br /> 因为加速度变化只能促使两个质量块朝相同方向移动,不会带来电容差分变化,因此电容差分变化与旋转角速度成正比。<br /> 科里奥利力(Coriolis force)有些书籍也称作哥里奥利力,简称为科氏力,是对旋转体系中进行直线运动的质点由于惯性相对于旋转体系产生的直线运动的偏移的一种描述。<br />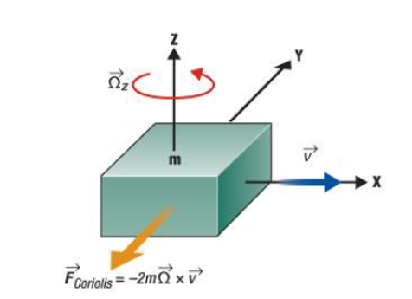<br />科氏力示意图
惯性测量单元(IMU)
IMU全称Inertial Measurement Unit,惯性测量单元,惯性测量元件是一种能够在惯性系中测量载体自身三维加速度和三维角度的设备,主要分为加速度计和角速度计两种,其统称为惯性测量元件。因此实际IMU传感器同时包含加速度计和陀螺仪,主要用来检测和测量加速度与旋转运动。其原理是采用惯性定律实现的,这些传感器从超小型的的MEMS传感器,到测量精度非常高的激光陀螺,无论尺寸只有几个毫米的MEMS传感器,到直径几近半米的光纤器件采用的都是这一原理。<br /> 惯性测量元件本身固有的误差由于时间积分会累积误差,并且受到元件本身的工艺、技术和成本的缘故,其误差越大,误差的累积就会越快,因此在飞行上万公里后累积的误差可以达到几公里甚至几十公里,因此现在导航系统都是通过GNSS全球卫星定位系统获取精准的定位和速度信息来对惯导系统进行修正。其实人体也有惯性测量元件,人的耳蜗充满液体,人在运动的时候,可以被耳中的神经感受到,因此可以测量出人体自身的运动特征。<br /> 人体的惯性测量元件也是非常差,闭上眼睛,也不摸周围的东西,只靠耳蜗感受的移动,人基本没法走直线,这里眼睛的作用就相当于GNSS的作用,它可以随时修正耳蜗所感应的惯性信息。<br />
以下列表包含最常用的FC IMU芯片。
IMU 国际货币联盟可能的通讯协议(BUS) 最高 有效陀螺仪采样频率
MPU6000 SPI,i2c 8K
MPU6050 i2c 4K
MPU6500 SPI,i2c 32K
MPU9150 i2c 4K
MPU9250 SPI,i2c 32K
ICM20602 SPI,i2c 32K
ICM20608 SPI,i2c 32K
ICM20689 SPI,i2c 32K
MPU9150实际上是带有集成式AK8975磁力计的MPU6050,而*MPU9250是带有相同磁力计的MPU6500
您可以找到印在芯片上的IMU型号,例如,这是流行的Invensense MPU-6000。
飞行控制器上的陀螺仪和加速度计
陀螺仪的选择:采样率与噪声
在飞行控制器中,需要考虑IMU的两个主要属性:最大采样率以及对噪声(电气和机械噪声)的敏感程度。
当前,使用最广泛的IMU是MPU6000,因为它支持高达8KHz的采样率,并且被证明是抗噪声能力最强的IMU之一。普遍的共识是,以避免MPU6500和MPU9250尽管其较高的采样速度。
ICM系列陀螺仪之间也存在性能差异。对飞控来说,ICM20689是容易受到噪声和具有高失败率最差的陀螺仪中的一个。如果必须选择ICM陀螺仪,请改用20602。
为了减少由于振动从电动机传递到系统中而引起的计算错误,有些FC的陀螺仪“软安装”(减震)在泡沫塑料上。
软装陀螺– Kakute F4
更新(2019年10月):由于Betaflight 4.1已删除32KHz模式,因此即使您将带ICM陀螺仪的Betaflight使用,您也只能运行高达8KHz的循环时间。
BetaFlight删除32KHz支持的原因之一可能是由于陀螺仪更快地成为了双刃剑。平滑的信号和电源工艺可以使ICM系列在32KHz时的性能优于MPU6000在8KHz时的性能。但是,会引入来自ESC和电动机的电气噪声 和/或 物理振动,并且ICM的性能下降要比MPU6000严重得多。
二、飞控系统中的陀螺仪
陀螺仪传感器能监测三轴的角速度,因此可监测出俯仰(pitch)、翻滚(roll)和偏摆(yaw)时角度的变化率。即使是一般飞行器,陀螺仪都是相当重要的传感器。角度信息的变化能用来维持无人机稳定并防止晃动。由陀螺仪所提供的信息将汇入马达控制驱动器,通过动态控制马达速度,并提供马达稳定度。<br /> 陀螺仪还能确保无人机根据用户控制装置所设定的角度旋转。意法半导体新推出的创新技术 LSM6DSM,是一款结合加速度计与陀螺仪的惯性测量装置(IMU)。它还能提供两项独立的陀螺仪输出——这种特色能用于飞行控制,同时当无人机配备摄影机的时候,也可用来稳定摄影机(OIS光学影像稳定/EIS 电子影像稳定功能)。<br /> IMU传感器的工作是测量四轴飞行器的运动和方向。

若有收获,就点个赞吧
0 人点赞
