1、飞机的操纵机构
飞机的运动通常利用升降舵、方向舵、副翼及油门杆来控制。下面叙述一下飞机各操纵机构的偏转极性及产生的力矩的极性。
升降舵偏转角用δy表示,规定升降舵后缘下偏为正。δy正向偏转产生的俯仰力矩M为负值,既低头力矩。
副翼偏转角用δx表示,规定右副翼后缘下偏(左副翼随同上偏)为正。δx正向偏转产生的滚转力矩L为负值。
方向舵偏转角用δz表示,规定方向舵后缘向左偏转为正。δz正向偏转产生的偏航力矩N为负值。
下图中表示的L、M、N均为正值。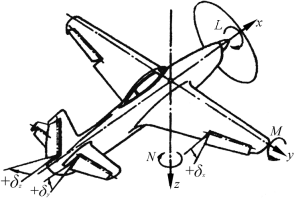
舵面与操纵机构的偏转极性
2、关于稳定性和操纵性的概念
飞机的飞行运动可分为基准运动和扰动运动。基准运动(也称未扰运动)是指各运动参数完全按预定的规律变化。扰动运动是指由于受到外干扰而偏离基准运动的运动。外干扰可能来自大气的扰动、发动机推力的改变或驾驶员的偶然操纵等。在外干扰作用停止之后,至少在某一段时间内,飞机不按基准运动的规律运动,而是按扰动运动的规律运动。经过一段时间,若飞机能从扰动运动恢复到基准运动,则称基准运动是稳定的。若扰动运动越来越离开基准运动,则称基准运动是不稳定的。若扰动运动既不恢复也不远离基准运动,则称基准运动是中立稳定的。这样的定义是运动稳定性的定义,也称为动稳定性。
解算动稳定性问题是比较复杂的,在飞机气动设计之初还不具备解算动稳定性的条件,但又必须考虑动稳定性问题。为了在一定程度上控制稳定性品质,提出了静稳定性概念。提出静稳定性概念并不是说飞机有两种意义的稳定性。稳定性是唯一的,即动稳定性,静稳定性是指在外干扰停止作用的最初瞬间,鉴别运动参数变化的趋势。例如,飞机受扰后,迎角α偏离原平衡位置;干扰消除后,靠飞机本身的气动特性(驾驶员不偏转舵面)使飞机有恢复、远离或既不恢复也不远离平衡位置的趋势,分别称为静稳定、静不稳定和静中立稳定。
操纵性问题与稳定性问题相互区别又相互关联。操纵性问题研究的是为实现某一飞行状态应该怎样操纵飞机,以及易于操纵的条件,操纵力是否适度,飞机对操纵响应的快慢等。飞机稳定性和操纵性的好坏,完全取决于飞机的气动特性和结构参数(如重量大小、转动惯量等)。因此,我们只有从研究作用在飞机上的外力着手,建立飞机的运动方程式,才能对稳定性和操纵性问题作出定量分析。
对飞机运动的控制通常是利用“三舵”、“一杆”进行的。三舵指的是三个运动舵面,即升降舵,用来控制飞机的俯仰运动;方向舵用来控制飞行的偏航运动;副翼用来控制飞机的倾斜运动。一杆即是指发动机的油门控制杆,用来控制发动机的推力大小。飞机的四个操纵机构,亦称为飞机的四个控制量,用来控制飞机在空间的六个自由度运动,或者说控制飞行的六个被控参量:三个位移量(高度H、速度V和侧向偏离Z),三个角运动量(俯仰角θ、偏航角ψ和倾斜角Φ)。
由此我们可以把飞机在空间的运动表示成下图所示的动力学环节。图中左侧的δx、δy、δz、δp称为环节的输入量或控制作用,右侧的θ、Φ、ψ、H、V和Z称为环节的输出量,亦称被控制量。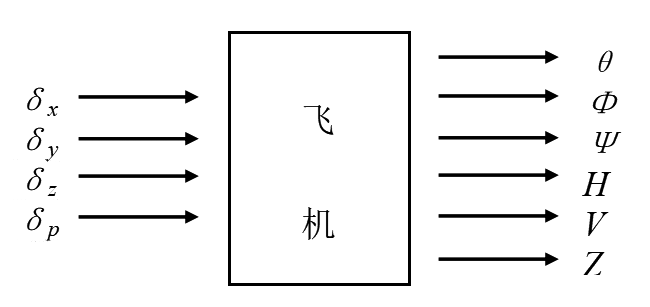
飞机运动力学环节示意图
对固定翼飞机来说,由于飞机结构和运动的特点,通常把飞机运动分成纵向运动和横侧运动来描述。
飞机纵向运动:在飞机纵向对称平面内的运动。飞机作纵向运动时,作用在飞机上诸外力为:
(1)发动机推力T,方向沿发动机轴线,与机身轴线形成发动机安装角T。一般情况下发动机推力线不一定通过飞机重心。重心对推力线的垂直距离为ZT,当重心在推力线上ZT为正值时,推力T对重心力矩为正。
(2)升力L,垂直于飞行速度V,向上为正。
(3)阻力D,平行于飞行速度V,向后为正。
(4)俯仰力矩Ma(仅指气动力矩),抬头为正。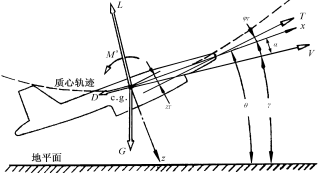
飞机纵向受力图
3、三大控制回路
自动飞行是用自动控制系统代替驾驶员控制飞机。假设要求飞机作水平直线飞行,驾驶员是如何控制飞机的呢?飞机受干扰(如阵风)偏离原姿态(例如飞机抬头),驾驶员用眼睛观察到仪表板上陀螺地平仪的变化,用大脑作出决定,通过神经系统传递到手臂,推动驾驶杆使升降舵向下偏转,产生相应的下俯力矩,飞机趋于水平。驾驶员又从仪表上看到这一变化,逐渐把驾驶杆收回原位。当飞机回到原态(水平)时,驾驶杆和升降舵面也回到原位。以上过程如图所示。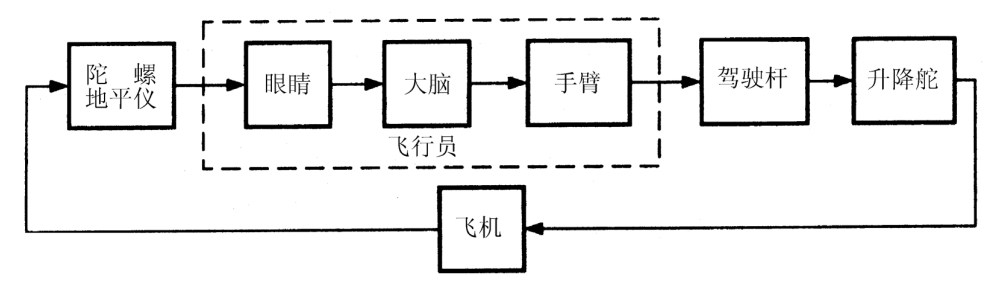
驾驶员控制飞机的方框图
这是一个“反馈”系统,即闭环系统。图中虚线框表示驾驶员。如前所述,自动飞行是用自动控制系统代替驾驶员,所以自动控制系统中必须包括与虚线框内三个部分相对应的装置,并与飞行器组成一个闭环系统,如图所示。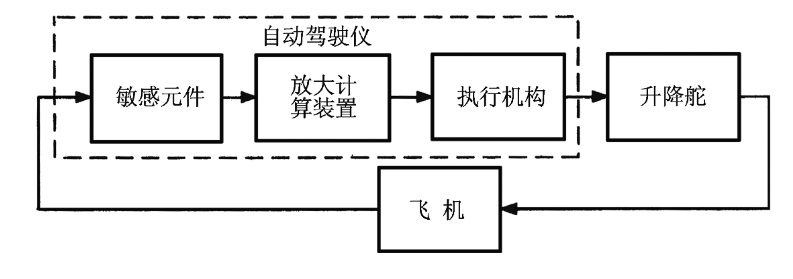
自动飞行的原理如下:飞机偏离原始状态,敏感元件感受到偏离方向和大小,并输出相应信号,经放大、计算处理,操纵执行机构(称为舵机),使控制面(例如升降舵面)相应偏转。由于整个系统是按负反馈的原则连接的,其结果是使飞机趋向原始状态。当飞机回到原始状态时,敏感元件输出信号为零,舵机以及与其相连的舵面也回原位,飞机重新按原始状态飞行。
由此可见,自动控制系统中的敏感元件、放大计算装置和执行机构可代替驾驶员的眼睛、大脑神经系统与肢体,自动地控制飞机的飞行。这三部分是飞行自动控制系统的核心,称为自动驾驶仪(AutoPilot)。
总之,自动飞行的基本原理就是自动控制理论中最重要、最本质的“反馈控制”原理。
如前所述,实现自动飞行必须通过自动控制系统形成回路。不同的飞行任务要求组成各种不同回路。为便于分析,以固定翼无人机为例,我们认为复杂的自动飞行回路由以下三个回路组成:
(1)舵回路
飞行自动控制系统根据输入信号,通过执行机构(舵机)控制舵面。为改善舵机的性能,通常引入内反馈(将舵机的输出反馈至输入端),形成随动系统(或称伺服系统或伺服回路),简称为舵回路。舵回路由舵机、放大器及反馈元件组成,如图虚线框内所示。图中测速机测出舵面偏转的角速度,反馈给放大器以增大舵回路的阻尼,改善舵回路的性能。位置传感器将舵面角位置信号反馈到舵回路的输入端,从而使控制信号与舵偏角一一对应。舵回路可用伺服系统理论来分析。舵回路的负载是舵面的惯量和作用在舵面上的气动力矩(铰链力矩)。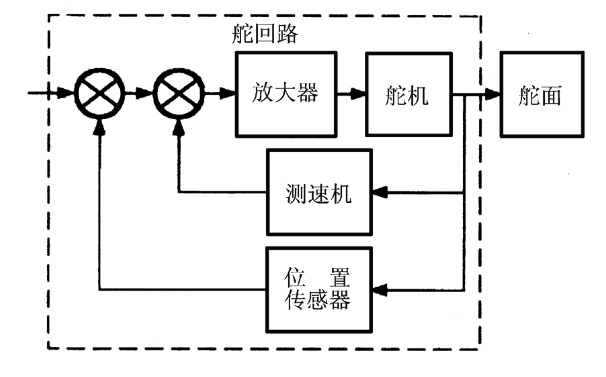
(2)稳定回路
舵回路加上敏感元件和放大计算装置组成自动驾驶仪,并与飞机组成新回路——稳定回路,如图所示。该回路的主要功能是稳定飞机的姿态,或者说稳定飞机的角运动。敏感元件用来测量飞机的姿态角。由于该回路中包含了飞机,而飞机的动态特性又随飞行条件(如速度、高度等)而异,使稳定回路的分析变得较为复杂。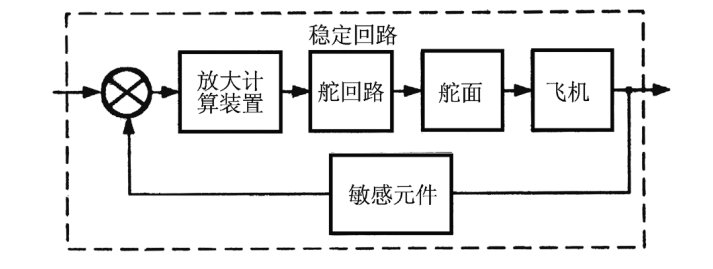
(3)控制回路
稳定回路加上测量飞机重心位置的元件以及运动学环节(表征飞机空间位置几何关系的环节)又组成一个更大的新回路,称为控制回路(或控制与导引回路,简称制导回路)。下面以飞机自动下滑着陆系统为例,说明控制回路的原理。这里只研究飞机的纵向(俯仰、上下和前后)运动。要求飞机在着地前沿预定航迹下滑到预定高度(十几米),然后将飞机拉平,飞机不断下降,最终以允许的下降速率着陆。预定的下滑航迹是由机场的无线电装置形成的。飞机处于预定下滑航迹,飞机上相应的无线电接收机输出信号为零。飞机偏离下滑航迹,接收机输出相应极性和幅值的信号,送至稳定回路,在自动驾驶仪控制下飞机回到下滑航迹。例如飞机在预定下滑航迹的上方,接收机将某极性的信号送给自动驾驶仪使升降舵下偏,产生低头控制力矩,使飞机进入下滑航迹。飞机进入下滑航迹后,接收机输出为零,舵偏角为零,飞机保持在下滑航迹上。由此可见,飞机重心的运动(即空间位置的变化)是通过控制飞机的角运动来实现的。目前在大气中飞行的大多数飞行器都采用这种方式控制重心运动。控制回路方块图如图所示。 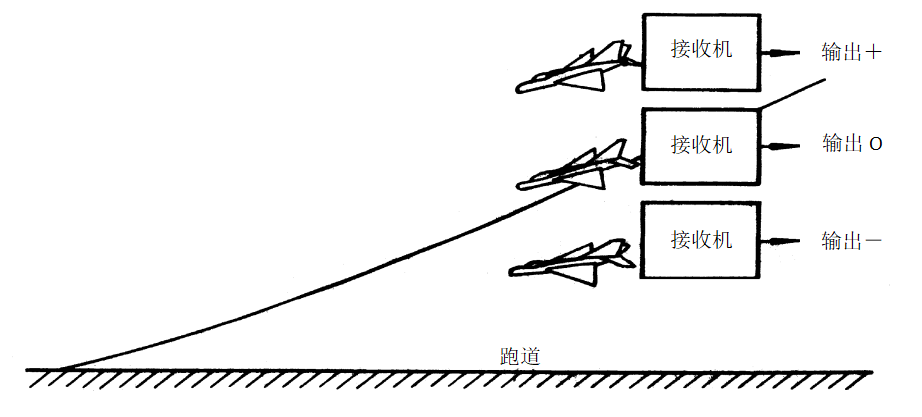
预定下滑轨迹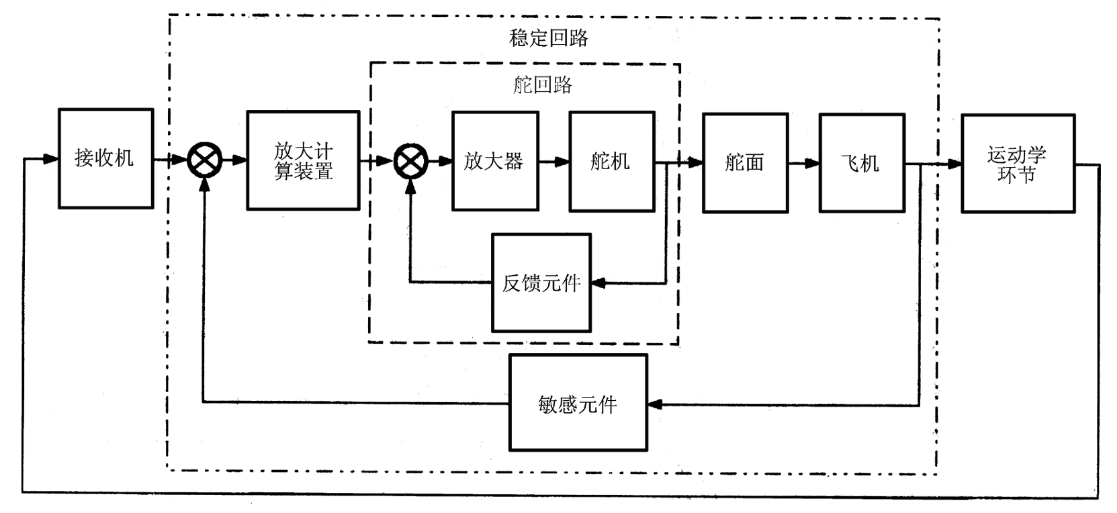
控制(制导)回路

若有收获,就点个赞吧
0 人点赞
