飞控要保持飞机稳定,要控制飞机按照我们的指令飞行,首先要知道飞机的自身状态。就像我们人靠眼睛耳朵鼻子皮肤去感知环境,飞机同样需要一堆传感器去感知环境,来确定自己的状态。那么都需要哪些传感器呢?这就首先要问我们要控制无人机需要知道无人机的哪些状态。首先,姿态是我们要控制的重点和难点,当然是感知的重点,解决正常飞行的问题。其次,是位置信息,知道飞到哪里的问题。
这样我们就确定了需要感知的飞行状态:姿态和位置,以及位置的微分:速度。下面就可以设计传感器来感知飞机的姿态和位置了。对位置来说,在室外我们用的最多的当然是全球卫星导航系统GNSS了,能够提供位置信息和速度信息。那么姿态呢,就需要使用惯性测量器件了,用来确定姿态的惯性器件是陀螺仪,它可以测量角速度,在知道角度初值的情况下,通过对角速度积分就可以得到角度信息。
但是,对低成本的小型无人机来说,不论是GPS还是MEMS陀螺仪,测量的精度都不容乐观。比如,GPS放在那里不动,位置和速度就会不停的变化(漂移);MEMS惯性器件更是,零偏、随机游走误差、尺度误差、轴间耦合误差,不但误差种类繁多,更是会随着温度的变化而变化,加上陀螺仪是需要积分获得角度的,这些误差会一直积累,不一会就偏差的无法使用了。
那怎么办呢?比较好的办法就是增加一些测量姿态和位置的传感器。如果一把尺子不准,我们就换把尺子,然后综合两次的测量结果就会得到更好的结果。所以我们会增加加速度计和磁航向仪来辅助测量姿态和位置。对无人机来说,和可以增加气压高度计、空速计、光流计、视觉系统、测距雷达等等传感器。如下图: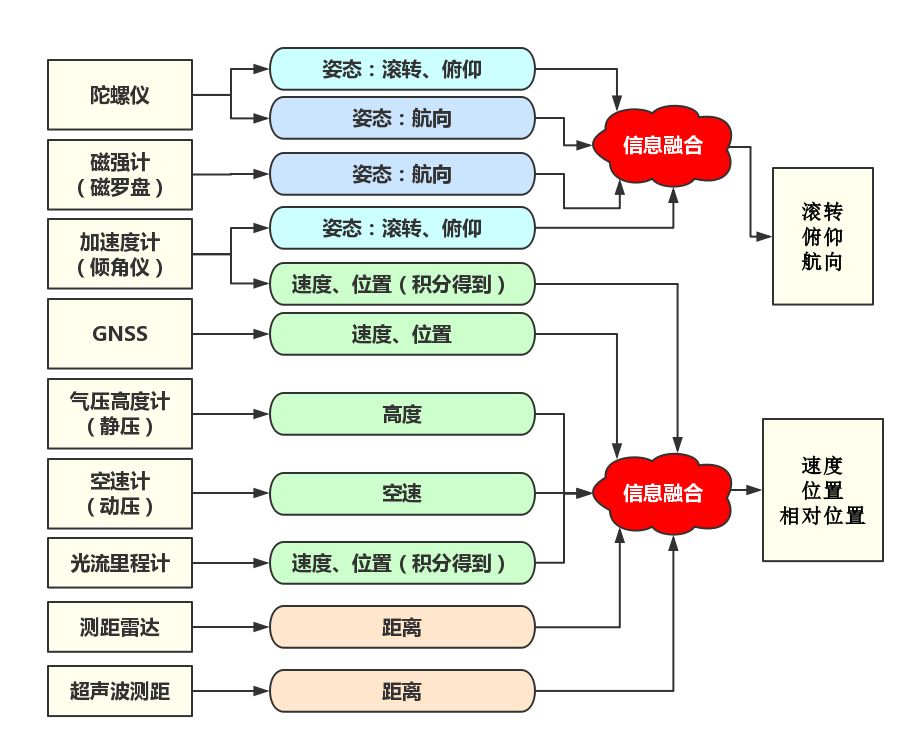
除此之外,还可能会有许多其他传感器,比如电流/电压传感器、舵角传感器、旋翼转速传感器等等,这些就不在本任务中讨论了。
【知识点】 MEMS 传感器
微机电系统(英语:Micro-Electro-Mechanical Systems,缩写 MEMS 12.20 HEMS技术是建立在微米 /纳米技术(micro/nanotechnology)基础上的 21世纪前沿技术,是指对微米/纳米材料进行设计、 加工、制造、测量和控制的技术。它可将机械构件、光学系统、驱动部件、电控系统集成为一个整体单元的微型系统
传统工艺与MEMS工艺对比
传统的驻极体麦克风: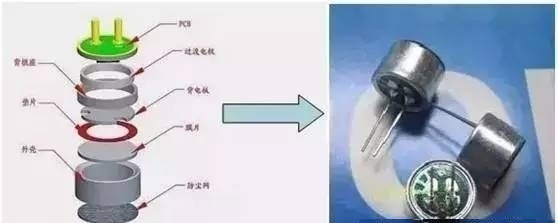
MEMS麦克风: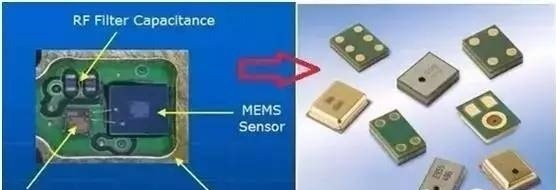

若有收获,就点个赞吧
0 人点赞
