自动飞行是用自动控制系统代替驾驶员控制飞机。假设要求飞机作水平直线飞行,驾驶员是如何控制飞机的呢?飞机受干扰(如阵风)偏离原姿态(例如飞机抬头),驾驶员用眼睛观察到仪表板上陀螺地平仪的变化,用大脑作出决定,通过神经系统传递到手臂,推动驾驶杆使升降舵向下偏转,产生相应的下俯力矩,飞机趋于水平。驾驶员又从仪表上看到这一变化,逐渐把驾驶杆收回原位。当飞机回到原态(水平)时,驾驶杆和升降舵面也回到原位。以上过程如图所示。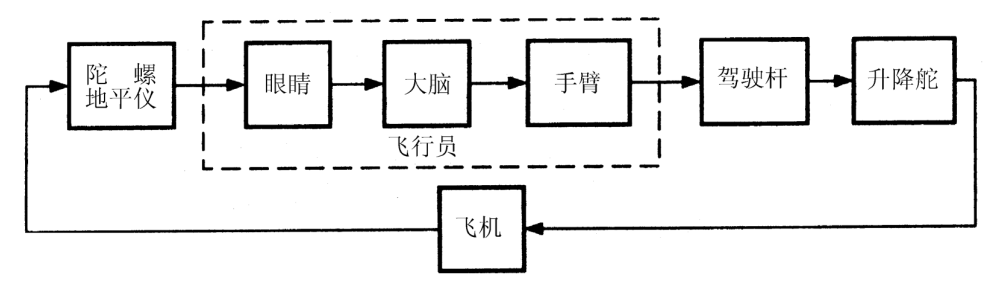
驾驶员控制飞机的方框图
这是一个“反馈”系统,即闭环系统。图中虚线框表示驾驶员。如前所述,自动飞行是用自动控制系统代替驾驶员,所以自动控制系统中必须包括与虚线框内三个部分相对应的装置,并与飞行器组成一个闭环系统,如图所示。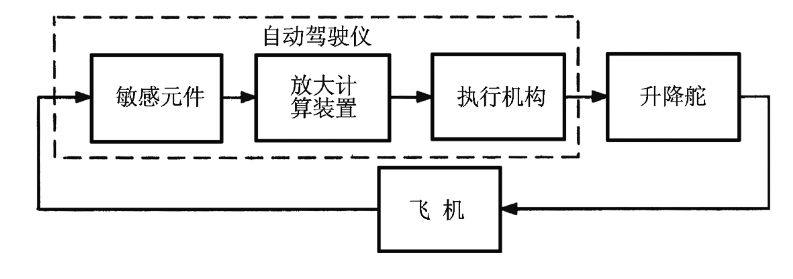
自动飞行的原理如下:飞机偏离原始状态,敏感元件感受到偏离方向和大小,并输出相应信号,经放大、计算处理,操纵执行机构(称为舵机),使控制面(例如升降舵面)相应偏转。由于整个系统是按负反馈的原则连接的,其结果是使飞机趋向原始状态。当飞机回到原始状态时,敏感元件输出信号为零,舵机以及与其相连的舵面也回原位,飞机重新按原始状态飞行。
由此可见,自动控制系统中的敏感元件、放大计算装置和执行机构可代替驾驶员的眼睛、大脑神经系统与肢体,自动地控制飞机的飞行。这三部分是飞行自动控制系统的核心,称为自动驾驶仪(AutoPilot)。
总之,自动飞行的基本原理就是自动控制理论中最重要、最本质的“反馈控制”原理。
如前所述,实现自动飞行必须通过自动控制系统形成回路。不同的飞行任务要求组成各种不同回路。为便于分析,我们认为复杂的自动飞行回路由以下三个回路组成:
2.2.1 舵回路
飞行自动控制系统根据输入信号,通过执行机构(舵机)控制舵面。为改善舵机的性能,通常引入内反馈(将舵机的输出反馈至输入端),形成随动系统(或称伺服系统或伺服回路),简称为舵回路。舵回路由舵机、放大器及反馈元件组成,如图虚线框内所示。图中测速机测出舵面偏转的角速度,反馈给放大器以增大舵回路的阻尼,改善舵回路的性能。位置传感器将舵面角位置信号反馈到舵回路的输入端,从而使控制信号与舵偏角一一对应。舵回路可用伺服系统理论来分析。舵回路的负载是舵面的惯量和作用在舵面上的气动力矩(铰链力矩)。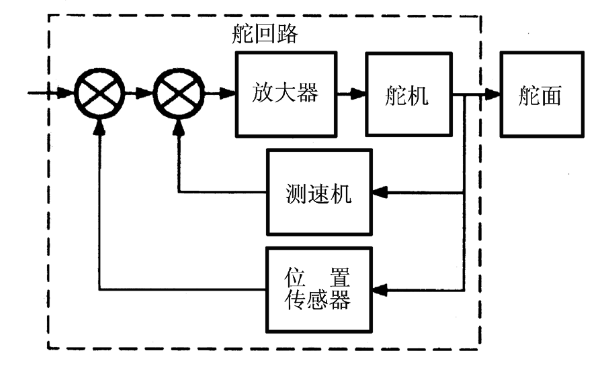
2.2.2 稳定回路
舵回路加上敏感元件和放大计算装置组成自动驾驶仪,并与飞机组成新回路——稳定回路,如图所示。该回路的主要功能是稳定飞机的姿态,或者说稳定飞机的角运动。敏感元件用来测量飞机的姿态角。由于该回路中包含了飞机,而飞机的动态特性又随飞行条件(如速度、高度等)而异,使稳定回路的分析变得较为复杂。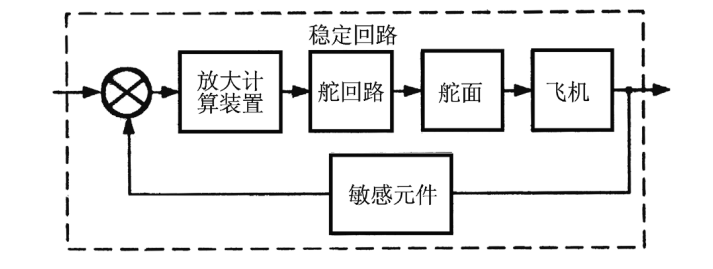
2.2.3 控制回路
稳定回路加上测量飞机重心位置的元件以及运动学环节(表征飞机空间位置几何关系的环节)又组成一个更大的新回路,称为控制回路(或控制与导引回路,简称制导回路)。下面以飞机自动下滑着陆系统为例,说明控制回路的原理。这里只研究飞机的纵向(俯仰、上下和前后)运动。要求飞机在着地前沿预定航迹下滑到预定高度(十几米),然后将飞机拉平,飞机不断下降,最终以允许的下降速率着陆。预定的下滑航迹是由机场的无线电装置形成的。飞机处于预定下滑航迹,飞机上相应的无线电接收机输出信号为零。飞机偏离下滑航迹,接收机输出相应极性和幅值的信号,送至稳定回路,在自动驾驶仪控制下飞机回到下滑航迹。例如飞机在预定下滑航迹的上方,接收机将某极性的信号送给自动驾驶仪使升降舵下偏,产生低头控制力矩,使飞机进入下滑航迹。飞机进入下滑航迹后,接收机输出为零,舵偏角为零,飞机保持在下滑航迹上。由此可见,飞机重心的运动(即空间位置的变化)是通过控制飞机的角运动来实现的。目前在大气中飞行的大多数飞行器都采用这种方式控制重心运动。控制回路方块图如图所示。 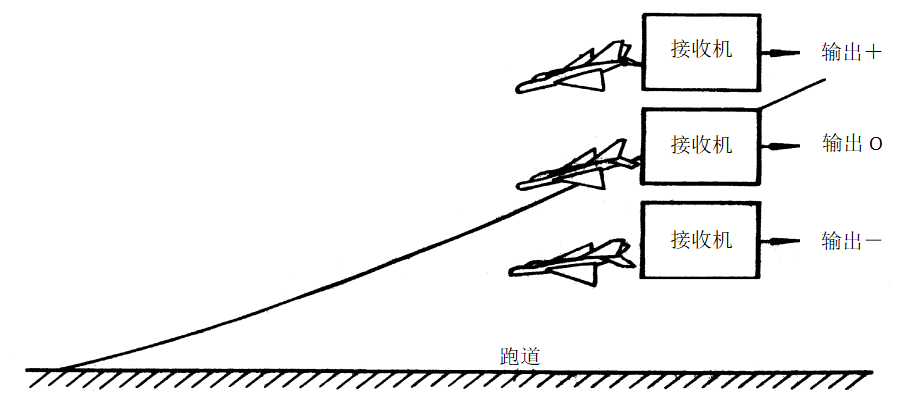
预定下滑轨迹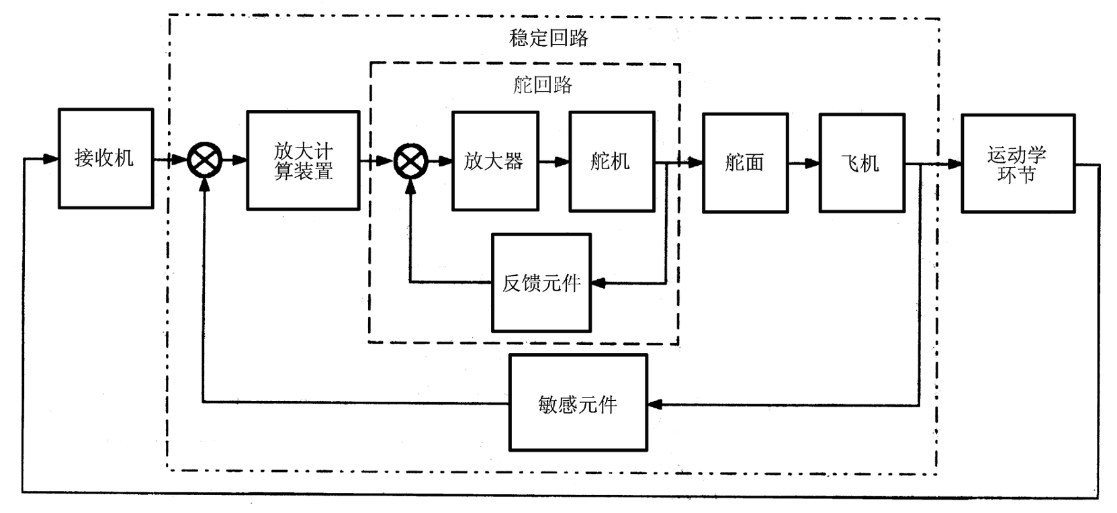
控制(制导)回路

若有收获,就点个赞吧
0 人点赞
