飞控系统是无人机的关键核心系统之一。它在部分情况下,按具体功能又可划分为导航子系统和飞控子系统两部分。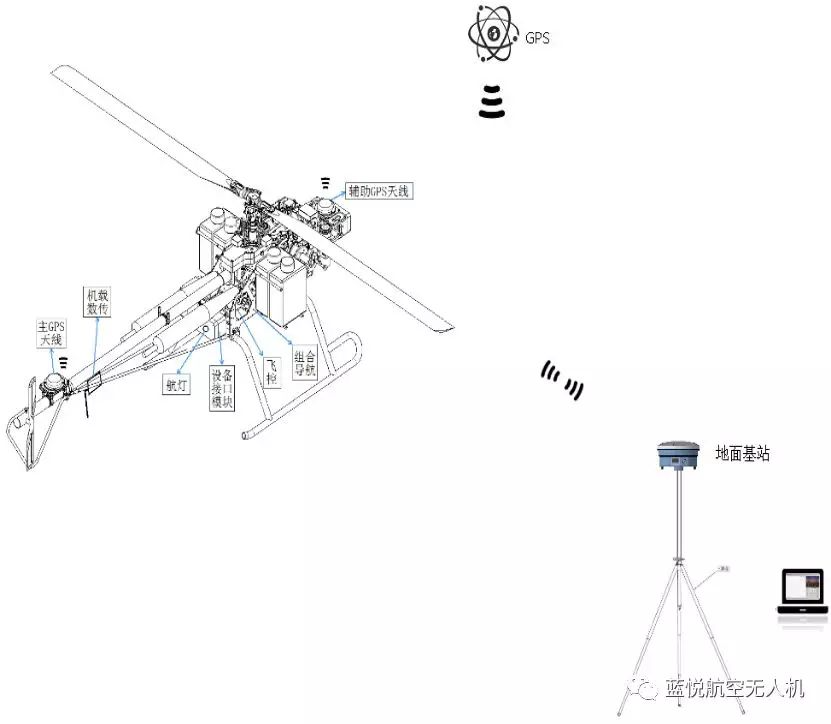
导航子系统:向无人机提供相对于所选定的参考坐标系的位置、速度、飞行姿态,引导无人机沿指定航线安全、准时、准确地飞行。完善的无人机导航子系统具有以下功能:
(1)获得必要的导航要素,包括高度、速度、姿态、航向;
(2)给出满足精度要求的定位信息,包括经度、纬度;
(3)引导飞机按规定计划飞行;
(4)接收预定任务航线计划的装定,并对任务航线的执行进行动态管理;
(5)接收控制站的导航模式控制指令并执行,具有指令导航模式与预定航线飞行模式相互切换的功能;
(6)具有接收并融合无人机其他设备的辅助导航定位信息的能力;
(7)配合其他系统完成各种任务
飞控子系统:无人机完成起飞、空中飞行、执行任务、返厂回收等整个飞行过程的核心系统,对无人机实现全权控制与管理,因此飞控子系统之于无人机相当于驾驶员之于有人机,是无人机执行任务的关键。飞控子系统主要具有如下功能:
(1)无人机姿态稳定与控制;
(2)与导航子系统协调完成航迹控制;
(3)无人机起飞(发射)与着陆(回收)控制;
(4)无人机飞行管理;
(5)无人机任务设备管理与控制;
(6)应急控制;
(7)信息收集与传递。
以上所列的功能中第1、4和6项是所有无人机飞行控制系统所必须具备的功能,而其他项则不是每一种飞行控制系统都具备的,也不是每一种无人机都需要的,根据具体无人机的种类和型号可进行选择和组合。

传感器

无人机导航飞控系统常用的传感器包括角速度率传感器、姿态传感器、位置传感器、迎角侧滑传感器、加速度传感器、高度传感器及空速传感器等,这些传感器构成无人机导航飞控系统设计的基础。
1.角速度传感器
角速度传感器是飞行控制系统的基本传感器之一,用于感受无人机绕机体轴的转动角速率,以构成角速度反馈,改善系统的阻尼特性、提高稳定性。
角速度传感器的选择要考虑其测量范围、精度、输出特性、带宽等。
角速度传感器应安装在无人机重心附件,安装轴线与要感受的机体轴向平行,并特别注意极性的正确性。
2.姿态传感器
姿态传感器用于感受无人机的俯仰、转动和航向角度,用于实现姿态稳定与航向控制功能。
姿态传感器的选择要考虑其测量范围、精度、输出特性、动态特性等。
姿态传感器应安装在无人机重心附近,振动要尽可能小,有较高的安装精度要求。
3.高度、空速传感器(大气机)
高度、空速传感器(大气机)用于感受无人机的飞行高度和空速,是高度保持和空速保持的必备传感器。一般和空速管、同期管路构成大气数据系统。
高度、空速传感器(大气机)的选择主要考虑测量范围和测量精度。一般要求其安装在空速管附近,尽量缩短管路。
4.位置传感器
位置传感器用于感受无人机的位置,是飞行轨迹控制的必要前提。惯性导航设备、GPS卫星导航接收机、磁航向传感器是典型的位置传感器。
位置传感器的选择一般要考虑与飞行时间相关的导航精度、成本和可用性等问题。
惯性导航设备有安装位置和较高的安装精度要求,GPS的安装主要应避免天线的遮挡问题。
磁航向传感器要安装在受铁磁性物质影响最小且相对固定的地方,安装件应采用非磁性材料制造。
飞控计算机

导航飞控计算机,简称飞控计算机,是导航飞控系统的核心部件,从无人机飞行控制的角度来看,飞控计算机应具备如下功能:
(1)姿态稳定与控制
(2)导航与制导控制
(3)自主飞行控制
(4)自动起飞、着陆控制。
1.飞控计算机类型
飞控计算机按照对信号的处理方式,主要分为模拟式。数据混合式和数字式、飞控计算机三种类型。
现今,随着数学电路技术的发展,模拟式飞控计算机已基本被数字式飞控计算机取代,新研制的无人机飞控系统几乎都采用了数字式飞控计算机。
2.飞控计算机余度
无人机没有人身安全问题,因此会综合考虑功能、任务可靠性要求和性能价格比来进行余度配置设计。就飞控计算机而言,一般大、小型无人机都有余度设计,一些简单的微、轻型无人机无单余度设计。
3.飞控计算机主要硬件构成
(1)主处理控制器。主要有通用型处理器(MPU)、微处理器(MCU)、数字信号处理器(DSP)。随着FPGA技术的发展,相当多的主处理器FPGA和处理器组合成强大的主处理控制器。
(2)二次电源。二次电源是飞控计算机的一个关键部件。飞控计算机的二次电源一般为5V、±15V等直流电源电压,而无人机的一次电源根据型号不同区别较大,要对一次电源进行变换。现在普遍使用集成开关电源模块。
(3)模拟量输入/输出接口。模拟量输入接口电路将各传感器输入的模拟量进行信号调理、增益变换,模/数(A/D)转换后,提供给微处理器进行相应处理。模拟信号一般可分为直流模拟信号和交流调制信号两类。模拟量输出接口电路用于将数字控制信号转换为伺服机构能识别的模拟控制信号,包括模/数转换、幅值变换和驱动电路。
(4)离散量接口。离散量输出电路用于将飞控计算机内部及外部的开关量信号变换为与微处理器工作电平兼容的信号。
(5)通信接口。用于将接收的串行数据转换为可以让主处理器读取的数据或将主处理器要发送的数据转换为相应的数据。飞控计算机和传感器之间可以通过RS232/RS422/ARINC429等总线方式通信,随着技术的不断发展,1553B总线等其他总线通信方式也将应用到无人机系统中。
(6)余度管理。无人机余度类型飞控计算机多为双余度配置。余度支持电路用于支持多余度机载计算机协调运行,包括:通道计算机间的信息交换电路,同步指示电路,通道故障逻辑综合电路及故障切换电路。通道计算机间的信息交换电路是两个通道飞控计算机之间进行共享信息传递的信息通路。同步指示电路是同步运行的余度计算机之间相互同步的支持电路。通道故障逻辑综合电路将软件监控和硬件监控电路的监控结果进行综合,它的输出用于故障切换和故障指示。
(7)加温电路。常用工作环境超出工业品级温度范围的飞控计算机当中,以满足加温电路所需功率和加温方式的需求。
(8)检测接口。飞控计算机应留有合适的接口,方便与一线检测设备、二线检测设备连接。
(9)飞控计算机机箱。它直接影响计算机抗恶劣环境的能力以及可靠性、可维护性、使用寿命。
微型无人机使用的集成飞控硬件系统
4.机载飞控软件
机载导航飞控软件,简称机载飞控软件,是一种运行于飞控计算机上的嵌入式实时任务软件。它不仅要具有功能正确、性能好、效率高的特点,而且要具有较好的质量保证、可靠性和可维护性。
机载飞控软件按功能可以划分成如下功能模块:
(1)硬件接口驱动模块;
(2)传感器数据处理模块;
(3)飞行控制律模块;
(4)导航与制导模块;
(5)飞行任务管理模块
(6)任务设备管理模块;
(7)余度管理模块;
(8)数据传输、记录模块
(9)自检测模块
(10)其他模块。
5.飞控计算机自检测
飞控计算机自检测模块(BIT)提供故障检测、定位和隔离的功能。BIT按功能不同又分为维护自检测(MBIT)、加电起动自检测(PUBIT)、飞行前自检测(PBIT)、飞行中自检测(IFBIT)。

若有收获,就点个赞吧
0 人点赞
