本章主要讲解使用CC2530的串口0与上位机进行字符串的发送与接收,读者将会学习到如何使用串口助手发送字符串到开发板,以及使用开发板发送字符串给串口助手并显示出来。
4.1 串口通信基础理论
4.1.1 USART
全称为Universal Synchronous/Asynchronous Receiver/Transmitter,即通用串行 同步/异步 接收/发送器。CC2530内置两个USART,即USART0和USART1。USART中包含串行通信、同步通信和异步通信几个概念,接下来主要介绍一下。
4.1.2 并行通信和串行通信
- 并行通信是指同时发送各个数据位(bit),使用并行通信发送8个比特位的示意图如图所示。

- 串行通信是指一个接一个地发送各个比特位,通过串行通信发送8个比特位的示意图如图所示。
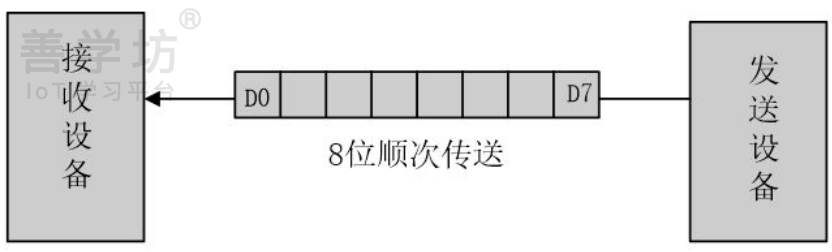
一般地,并行通信的速度比串行通信的速度更快,但所需要的数据引脚也更多。
4.1.3 异步通信与同步通信
举个简单的例子来说明异步通信与同步通信的主要区别:
(1)异步通信类似于手机发短信,其特点是随时可以发送,而且每次只能发送一条消息。
(2)同步通信类似于手机打电话,其特点是必须在对方接通后才能通话,而且在对方接通后想聊天(通信)多久都可以。
1.异步通信的特点
(1)接收设备要时刻做好接收数据的准备。
(2)发送设备随时可以发送数据。
(3)发送设备每次只能发送一个数据帧,即一段较长的数据需要被划分成多个数据帧,且数据帧的组成格式规定如下:
A.1个起始位。
B.5、7或8个数据位,即要传送的信息。
C.1个奇偶校验位。
D.1~2个停止位,规定为1。
异步通信的示意图如图所示。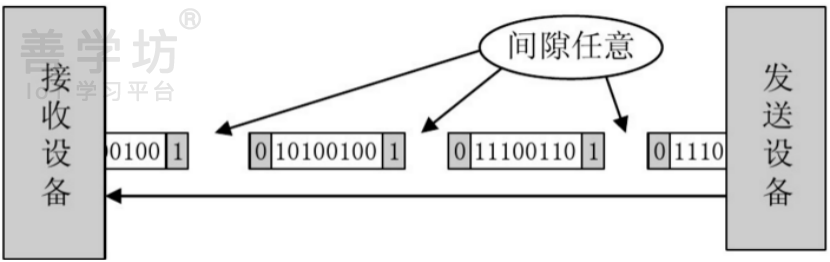
数据帧格式如图所示。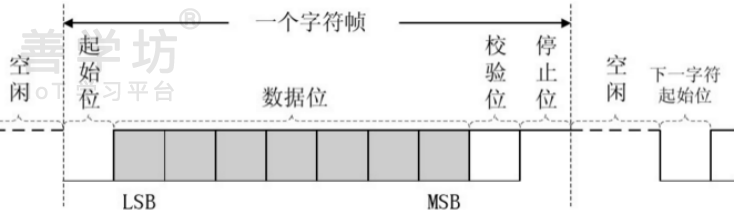
2. 同步通信的特点
(1)发送设备在发送消息前必须要先和接收设备做时钟频率同步。
(2)发送设备每次发送的是数据块(可以理解为多个字节),且消息格式如下:
A. 2个同步字符作为一个数据块的起始标志。
B. 多个连续传输的数据字节。
C. 2个字节的CRC码。CRC的全称是Cyclical Redundancy Check(循环冗余校验),是数据通信领域中常用的一种差错校验码,数据的接收者可以根据此码来判断所接收到数据是否发生错乱。
同步通信的示意图如图所示。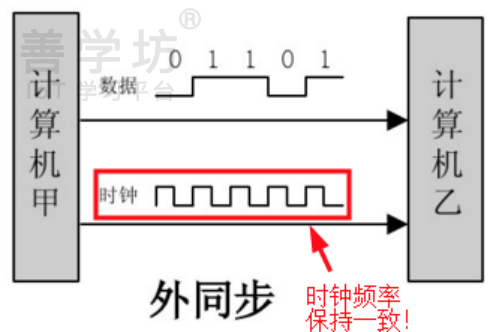
数据块的格式如图所示。
3. UART
UART的全称是Universal Asynchronous Receiver/Transmitter(通用串行异步收发器),也称作串口,可以理解为在USART的基础上去掉了同步通信的支持,通常用于主机与嵌入式设备之间的通信,例如配套的ZigBee开发板便可以使用UART与PC主机通信。
4. SPI
SPI的全称是Serial Peripheral Interface(串行外设接口),USART的一种,是一种具有速度快、全双工和同步通信特点的通信总线。
4.2 相关寄存器
CC2530有两个串口,分别是串口0和串口1。本小节以串口0为例讲解如何使用串口通信。P0_2和P0_3可以分别用作串口0的RX(接收端)和TX(发送端)。另外,P1_5和P1_4也可以分别用作串口0的TX和RX。由于ZigBee开发板默认使用了P0_2和P0_3,所以需要配置P0_2和P0_3的相关寄存器。
4.2.1 U0CSR
U0CSR是USART0控制和状态寄存器,其各个位的作用如下:
(1)Bit[7]表示USART模式,值为0表示SPI模式,值为1表示UART模式。
(2)Bit[6]表示是否启用UART接收器,值为0表示禁用接收器,值为1表示启动接收器。
(3)Bit[5]表示SPI 主机或者从机模式,值为0表示SPI主模式,值为1表示SPI从模式。
(4)Bit[4]表示UART 帧的停止位错误状态,值为0表示无错误,值为1表示有错误。
(5)Bit[3]表示UART奇偶错误状态,值为0无错误,值为1表示有错误。
(6)Bit[2]表示传送字节状态,值为0表示没有收到字节,值为1表示准备好接收字节。
(7)Bit[1]表示传送字节状态,值为0表示字节没有被传送,值为1表示写到数据缓存寄存器的最后字节被传送。
(8)Bit[0],USART传送/接收主动状态、在 SPI 从模式下该位等于从模式选择,0:USART 空闲 ,1:USART 忙碌。
4.2.2 U0GCR
U0GCR是USART0通用控制寄存器,其各个位的作用如下:
(1)Bit[7]表示SPI的时钟极性,值为0表示负时钟极性,值为1表示正时钟极性。
(2)Bit[6]表示SPI 时钟相位,值为0表示当SCK从CPOL倒置到CPOL时数据输出到MOSI,并且当SCK从CPOL倒置到CPOL时数据输入抽样到MISO;值为1表示当SCK从CPOL倒置到CPOL时数据输出到MOSI,并且当SCK从CPOL倒置到CPOL时数据输入抽样到 MISO。
(3)Bit[5]表示传送位顺序,值为0表示LSB 先传送,值为1表示MSB 先传送。
(4)Bit[4:0]表示波特率指数值BAUD_E。
4.2.3 U0BAUD
表示波特率小数部分的值BAUD_M,BAUD_E和BAUD_M决定了UART的波特率和SPI的主SCK时钟频率。
4.2.4 U0DBUF
U0DBUF是USART0的缓存寄存器,用于接收或发送数据时的缓存。
4.2.5 UTX0IF
UTX0IF是USART0的TX中断标志标志寄存器,值为0表示无中断未决,值为1表示中断未决。
4.2.6 URX0IE
URX0IE是USART0的RX 中断使能寄存器,值为0表示中断禁止,值为1表示中断使能。
4.2.7 CLKCONCMD
CLKCONCMD是时钟控制命令寄存器,其各个位的作用如下:
(1)Bit[7]用于配置32 kHz 时钟振荡器,值为0表示32 kHz XOSC,值为1表示32 kHz RCOSC。
(2)Bit[6]用于配置系统时钟源,值为0表示32 MHz XOSC,值为1表示16 MHz RCOSC。
(3)Bit[5:3]用于配置定时器标记输出,配置方式见表。
| 值 | 意义 |
|---|---|
| 000 | 32 MHz |
| 001 | 16 MHz |
| 010 | 8 MHz |
| 011 | 4 MHz |
| 100 | 2 MHz |
| 101 | 1 MHz |
| 110 | 500 kHz |
| 111 | 250 kHz |
(4)Bit[2:0]用于配置时钟速度,配置方式见表。
| 值 | 意义 |
|---|---|
| 000 | 32 MHz |
| 001 | 16 MHz |
| 010 | 8 MHz |
| 011 | 4 MHz |
| 100 | 2 MHz |
| 101 | 1 MHz |
| 110 | 500 kHz |
| 111 | 250 kHz |
4.2.8 CLKCONSTA
CLKCONSTA寄存器是一个只读寄存器,用来获取当前时钟状态。
4.2.9 PERCFG
PERCFG是外设控制器,其中的第0位用于配置USART0的位置,值为0表示使用位置1,即使用P0_2和P0_3;值为1表示使用位置2,即使用P1_4和P1_5。
4.2.10 P2DIR
P2DIR用于控制端口2方向和端口0外设功能优先级,其中的Bit[7:6]用于控制端口0的外设功能优先级,值为00时表示端口0优先用作USART0。
4.2.11 URX0IF
URX0IF是串口0 RX中断标志寄存器,其中的Bit[1]用于USART0接收中断标志位。
配套的视频课程将会详细讲解以上的寄存器
4.3 配置串口0
根据上述的相关寄存器说明,串口0的配置步骤如下:
(1)通过外设控制寄存器PERCFG配置串口0的位置,即配置P0_2和P0_3用作外设接口而不是普通IO口,接着配置P0优先用作USART0,代码如下:
PERCFG = 0x00;//配置P0_2和P0_3用作串口0的TX(发送端)和RX(接收端)P0SEL = 0x3c;//配置P0_2和P0_3用作外设功能,而不是GPIOP2DIR &= ~0xc0;//配置端口0优先用作USART0
(2)设置USART0工作模式为UART0,代码如下:
U0CSR |= 0x80;
(3)把串口通信的波特率配置115200,配置代码如下:
U0GCR |= 11;//BAUD_EU0BAUD |= 216;//BAUD_M
其中的常用波特率配置见表。
| 波特率(bps) | UxBAUD.BAUD_M | UxGCR_BAUD_E | 误差(%) |
|---|---|---|---|
| 2400 | 59 | 6 | 0.14 |
| 4800 | 59 | 7 | 0.14 |
| 9600 | 59 | 8 | 0.14 |
| 14400 | 216 | 8 | 0.03 |
| 19200 | 59 | 9 | 0.14 |
| 28800 | 216 | 9 | 0.03 |
| 38400 | 59 | 10 | 0.14 |
| 57600 | 216 | 10 | 0.03 |
| 76800 | 59 | 11 | 0.14 |
| 115200 | 216 | 11 | 0.03 |
| 230400 | 216 | 12 | 0.03 |
(4)配置中断相关寄存器,代码如下:
UTX0IF = 0;// 清零UART0发送中断标志位URX0IF = 0;// 清零UART0接收中断标志位URX0IE = 1;//使能串口0接收中断EA = 1;//打开中断总开关
(5)启用串口0的数据接收功能,代码如下:
U0CSR |= 0x40;//启用数据接收功能
4.4 写串口数据收发的实现
打开本实验代码中的uart0.c文件,可以找到main函数,代码如下:
//2. 51单片机入门/4. 串口通信实验/Workspace/code/uart/uart0.cvoid main(){setSystemClk32MHZ();//设置系统时钟频率为32MHzinitUart0();//初始化串口0while(1) { }}
4.4.1 setSystemClk32MHZ函数
在默认情况下,如前面章节所述CC2530的时钟频率为16MHz。开发者可以使用32MHz的外部晶振作为系统的时钟源,让CC2530的时钟频率提升至32MHz,从而提升CC2530的处理速度。配置步骤如下:
(1)通过CLKCONCMD配置外部的32MHz晶振作为系统时钟源。
(2)等待时钟源稳定。
(3)通过CLKCONCMD设置系统时钟频率为32MHz。
对应的配置代码如下:
/** @brief 设置系统时钟为32MHz*/#define setSystemClk32MHZ() do {CLKCONCMD &= ~0x40;while(CLKCONSTA & 0x40);CLKCONCMD &= ~0x47;} while(0)
4.4.2 串口0的初始化
通过以上分析,串口0初始化函数initUart0的定义代码如下:
/** 初始化串口0*/static void initUart0(void){PERCFG = 0x00;//配置P0_2和P0_3用作串口0的TX(发送端)和RX(接收端)P0SEL = 0x3c;//配置P0_2和P0_3用作外设功能,而不是GPIOP2DIR &= ~0xc0;//配置端口0优先用作USART0U0CSR |= 0x80;//设置USART0工作模式为UART0/* 设置波特率为115200 */U0GCR |= 11;//BAUD_EU0BAUD |= 216;//BAUD_MUTX0IF = 0;// 清零UART0发送中断标志位URX0IF = 0;// 清零UART0接收中断标志位URX0IE = 1;//使能串口0接收中断EA = 1;//打开中断总开关U0CSR |= 0x40;//启用数据接收功能}
4.4.3 串口0的数据接收
在初始化串口0后,CC2530从串口0中接收到数据后便会产生中断。开发者只需要在对应的中断处理函数中处理接收到的数据即可,代码如下:
#pragma vector = URX0_VECTOR__interrupt void URX0_ISR(void){uint8_t rxChar;URX0IF = 0;//清零中断标志位rxChar = U0DBUF;//U0DBUF存放了从串口0接收到的数据uart0Send(&rxChar, 1); //通过串口0发送数据,即把从串口0接收到的数据又从串口0发送回去}
4.4.4 串口0的数据发送
可以使用串口0发送数据给上位机(例如串口助手),发送一个字节的步骤如下:
(1) 把数据存放到串口0数据缓存寄存器U0DBUF中,U0DBUF中的数据会自动通过串口0发送出去。
(2)等待发送完成,数据发送完成后中断标志位被置为1。
(3)清零这个中断标志位。
在前面的串口数据接收中断处理函数中调用了uart0Send,uart0Send是由笔者编写的一个串口0数据发送函数,其函数定义代码如下:
/*** @fn uart0Send** @brief 通过串口0发送数据** @param pMsg - 待发送数据的地址* @param msgLen - 待发送数据的长度,以字节为单位** @return none*/static void uart0Send(uint8_t *pMsg, uint8_t msgLen){uint8_t i;for (i = 0; i < msgLen; i++) {U0DBUF = pMsg[i];//把数据存放到串口0数据缓存寄存器U0DBUF中while (UTX0IF == 0);//等待发送完成UTX0IF = 0;//清零中断标志位}}
4.5 调试仿真
可以运行本实验代码以观察运行结果,操作步骤如下:
(1)编译链接本实验代码后,把程序烧录到ZigBee开发板中。
(2)由于程序需要使用到串口0,因此如果使用ZigBee标准板测试,需把拨码开关的第1和2位分别打到URX和UTX端,第3、4、5和6位打到ERX、ETX、P02和P03端,如图所示。
如果使用ZigBee Mini板测试,无需另外配置。
(3)打开友善串口调试助手,并且使用Micro USB线把开发板连接到电脑。按如图所示设置波特率、数据位、校验位、停止位和流控,以及发送/接收的字符编码方式,然后点击“启动”按钮。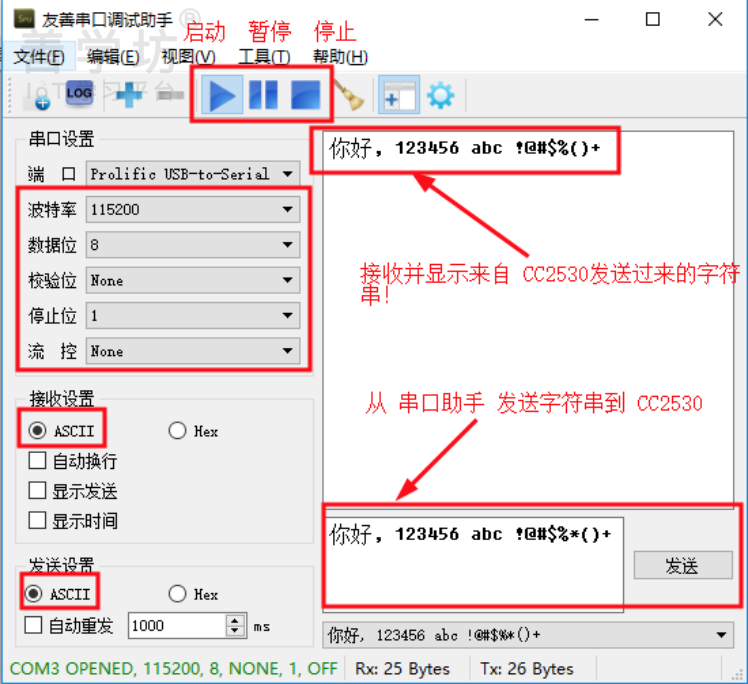
(4)在图所示输入框中输入字符串并点击发送,可以看到从串口助手发送给开发板的数据又会从开发板发送回来。
如您还没有安装串口调试助手,请到《第一部分》章节中根据提示下载安装

若有收获,就点个赞吧
0 人点赞
