线程是操作系统的最小调度单位,它本质上是进程中的一个执行流,我们知道,进程有代码段,线程其实就是进程代码段中的其中一段代码。线程的一种实现是作为进程来实现的(pthread线程库),通过调用clone,新建一个进程,然后执行父进程代码段里的一个代码片段,其中文件描述符、内存等信息都是共享的。因为内存是共享的,所以线程不能共享栈,否则访问栈的地址的时候,会映射到相同的物理地址,那样就会互相影响,所以每个线程会有自己独立的栈。在调用clone函数的时候会设置栈的范围,比如在堆上分配一块内存用于做线程的栈,并且支持设置子线程和主线程共享哪些资源。具体可以参考clone系统调用。
由于Node.js是单线程的,虽然底层的Libuv实现了一个线程池,但是这个线程池只能执行C、C层定义的任务。如果我们想自定义一些耗时的操作,那就只能在C层处理,然后暴露接口给JS层调用,这个成本是非常高的,在早期的Node.js版本里,我们可以用进程去实现这样的需求。但是进程太重了,在新版的Node.js中,Node.js为我们提供了多线程的功能。这一章以Node.js多线程模块为背景,分析Node.js中多线程的原理,但是不分析Libuv的线程实现,它本质是对线程库的简单封装。Node.js中,线程的实现也非常复杂。虽然底层只是对线程库的封装,但是把它和Node.js原本的架构结合起来变得复杂起来。
14.1 使用多线程
对于同步文件操作、DNS解析等操作,Node.js使用了内置的线程池支持了异步。但是一些加解密、字符串运算、阻塞型API等操作。我们就不能在主线程里处理了,这时候就不得不使用线程,而且多线程还能利用多核的能力。Node.js的子线程本质上是一个新的事件循环,但是子线程和Node.js主线程共享一个Libuv线程池,所以如果在子线程里有文件、DNS等操作就会和主线程竞争Libuv线程池。如图14-1所示。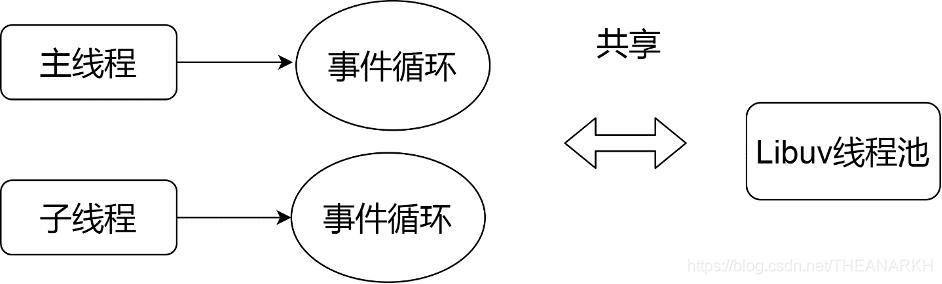
图14-1
我们看一下在Node.js中如何使用线程。
const { Worker, isMainThread, parentPort } = require('worker_threads');if (isMainThread) {const worker = new Worker(__filename);worker.once('message', (message) => {...});worker.postMessage('Hello, world!');} else {// 做点耗时的事情parentPort.once('message', (message) => {parentPort.postMessage(message);});}
上面这段代码会被执行两次,一次是在主线程,一次在子线程。所以首先通过isMainThread判断当前是主线程还是子线程。主线程的话,就创建一个子线程,然后监听子线程发过来的消息。子线程的话,首先执行业务相关的代码,还可以监听主线程传过来的消息。我们在子线程中可以做一些耗时或者阻塞性的操作,不会影响主线程的执行。我们也可以把这两个逻辑拆分到两个文件。
主线程
const { Worker, isMainThread, parentPort } = require('worker_threads');const worker = new Worker(‘子线程文件路径’);worker.once('message', (message) => {...});worker.postMessage('Hello, world!');
子线程
const { Worker, isMainThread, parentPort } = require('worker_threads');parentPort.once('message', (message) => {parentPort.postMessage(message);});
14.2 线程间通信数据结构
进程间的通信一般需要借助操作系统提供公共的内存来完成。因为进程间的内存是独立的,和进程间通信不一样。多线程的内存是共享的,同个进程的内存,多个线程都可以访问,所以线程间通信可以基于进程内的内存来完成。在Node.js中,线程间通信使用的是MessageChannel实现的,它是全双工的,任意一端都可以随时发送信息。MessageChannel类似socket通信,它包括两个端点。定义一个MessageChannel相当于建立一个TCP连接,它首先申请两个端点(MessagePort),然后把它们关联起来。下面我们看一下线程间通信的实现中,比较重要的几个数据结构。
1 Message代表一个消息。
2 MessagePortData是对操作Message的封装和对消息的承载。
3 MessagePort是代表通信的端点。
4 MessageChannel是代表通信的两端,即两个MessagePort。
下面我们看一下具体的实现。
14.2.1 Message
Message类代表的是子线程间通信的一条消息。
class Message : public MemoryRetainer {public:explicit Message(MallocedBuffer<char>&& payload = MallocedBuffer<char>());// 是否是最后一条消息,空消息代表是最后一条消息bool IsCloseMessage() const;// 线程间通信的数据需要通过序列化和反序列化处理v8::MaybeLocal<v8::Value> Deserialize(Environment* env,v8::Local<v8::Context> context);v8::Maybe<bool> Serialize(Environment* env,v8::Local<v8::Context> context,v8::Local<v8::Value> input,const TransferList& transfer_list,v8::Local<v8::Object> source_port =v8::Local<v8::Object>());// 传递SharedArrayBuffer型变量void AddSharedArrayBuffer(std::shared_ptr<v8::BackingStore> backing_store);// 传递MessagePort型变量void AddMessagePort(std::unique_ptr<MessagePortData>&& data);// 消息所属端口,端口是消息到达的地方const std::vector<std::unique_ptr<MessagePortData>>& message_ports() const {return message_ports_;}private:// 保存消息的内容MallocedBuffer<char> main_message_buf_;std::vector<std::shared_ptr<v8::BackingStore>> array_buffers_;std::vector<std::shared_ptr<v8::BackingStore>> shared_array_buffers_;std::vector<std::unique_ptr<MessagePortData>> message_ports_;std::vector<v8::CompiledWasmModule> wasm_modules_;};
14.2.2 MessagePortData
MessagePortData是管理消息发送和接收的类。
class MessagePortData : public MemoryRetainer {public:explicit MessagePortData(MessagePort* owner);~MessagePortData() override;// 新增一个消息void AddToIncomingQueue(Message&& message);// 关联/解关联通信两端的端口static void Entangle(MessagePortData* a, MessagePortData* b);void Disentangle();private:// 用于多线程往对端消息队列插入消息时的互斥变量mutable Mutex mutex_;std::list<Message> incoming_messages_;// 所属端口MessagePort* owner_ = nullptr;// 用于多线程访问对端sibling_属性时的互斥变量std::shared_ptr<Mutex> sibling_mutex_ = std::make_shared<Mutex>();// 指向通信对端的指针MessagePortData* sibling_ = nullptr;};
我们看一下实现。
MessagePortData::MessagePortData(MessagePort* owner) : owner_(owner) { }MessagePortData::~MessagePortData() {// 析构时解除和对端的关系Disentangle();}// 插入一个messagevoid MessagePortData::AddToIncomingQueue(Message&& message) {// 先加锁,保证多线程安全,互斥访问Mutex::ScopedLock lock(mutex_);// 插入消息队列incoming_messages_.emplace_back(std::move(message));// 通知ownerif (owner_ != nullptr) {owner_->TriggerAsync();}}// 关联通信的对端,并保持对端的互斥变量,访问对端时需要使用void MessagePortData::Entangle(MessagePortData* a, MessagePortData* b) {a->sibling_ = b;b->sibling_ = a;a->sibling_mutex_ = b->sibling_mutex_;}// 解除关联void MessagePortData::Disentangle() {// 加锁操作对端的sibling字段std::shared_ptr<Mutex> sibling_mutex = sibling_mutex_;Mutex::ScopedLock sibling_lock(*sibling_mutex);sibling_mutex_ = std::make_shared<Mutex>();// 对端MessagePortData* sibling = sibling_;// 对端非空,则把对端的sibling也指向空,自己也指向空if (sibling_ != nullptr) {sibling_->sibling_ = nullptr;sibling_ = nullptr;}// 插入一个空的消息通知对端和本端AddToIncomingQueue(Message());if (sibling != nullptr) {sibling->AddToIncomingQueue(Message());}}
14.2.3 MessagePort
MessagePort表示的是通信的一端。
class MessagePort : public HandleWrap {public:MessagePort(Environment* env,v8::Local<v8::Context> context,v8::Local<v8::Object> wrap);~MessagePort() override;static MessagePort* New(Environment* env,v8::Local<v8::Context> context,std::unique_ptr<MessagePortData> data = nullptr);// 发送消息v8::Maybe<bool> PostMessage(Environment* env,v8::Local<v8::Value> message,const TransferList& transfer);// 开启/关闭接收消息void Start();void Stop();static void New(const v8::FunctionCallbackInfo<v8::Value>& args);// 提供JS层使用的方法static void PostMessage(const v8::FunctionCallbackInfo<v8::Value>& args);static void Start(const v8::FunctionCallbackInfo<v8::Value>& args);static void Stop(const v8::FunctionCallbackInfo<v8::Value>& args);static void Drain(const v8::FunctionCallbackInfo<v8::Value>& args);static void ReceiveMessage(const v8::FunctionCallbackInfo<v8::Value>& args);// 关联对端static void Entangle(MessagePort* a, MessagePort* b);static void Entangle(MessagePort* a, MessagePortData* b);// 解除MessagePortData和端口的关系std::unique_ptr<MessagePortData> Detach();// 关闭端口void Close(v8::Local<v8::Value> close_callback = v8::Local<v8::Value>()) override;inline bool IsDetached() const;private:void OnClose() override;void OnMessage();void TriggerAsync();v8::MaybeLocal<v8::Value> ReceiveMessage(v8::Local<v8::Context> context,bool only_if_receiving);// MessagePortData用于管理消息的发送和接收std::unique_ptr<MessagePortData> data_ = nullptr;// 是否开启接收消息标记bool receiving_messages_ = false;// 用于收到消息时通知事件循环,事件循环执行回调处理消息uv_async_t async_;};
我们看一下实现,只列出部分函数。
// 端口是否不接收消息了bool MessagePort::IsDetached() const {return data_ == nullptr || IsHandleClosing();}// 有消息到达,通知事件循环执行回调void MessagePort::TriggerAsync() {if (IsHandleClosing()) return;CHECK_EQ(uv_async_send(&async_), 0);}// 关闭接收消息的端口void MessagePort::Close(v8::Local<v8::Value> close_callback) {if (data_) {// 持有锁,防止再接收消息Mutex::ScopedLock sibling_lock(data_->mutex_);HandleWrap::Close(close_callback);} else {HandleWrap::Close(close_callback);}}// 新建一个端口,并且可以挂载一个MessagePortDataMessagePort* MessagePort::New(Environment* env,Local<Context> context,std::unique_ptr<MessagePortData> data) {Context::Scope context_scope(context);Local<FunctionTemplate> ctor_templ = GetMessagePortConstructorTemplate(env);Local<Object> instance;// JS层使用的对象if (!ctor_templ->InstanceTemplate()->NewInstance(context).ToLocal(&instance))return nullptr;// 新建一个消息端口MessagePort* port = new MessagePort(env, context, instance);// 需要挂载MessagePortDataif (data) {port->Detach();port->data_ = std::move(data);Mutex::ScopedLock lock(port->data_->mutex_);// 修改data的owner为当前消息端口port->data_->owner_ = port;// data中可能有消息port->TriggerAsync();}return port;}// 开始接收消息void MessagePort::Start() {Debug(this, "Start receiving messages");receiving_messages_ = true;Mutex::ScopedLock lock(data_->mutex_);// 有缓存的消息,通知上层if (!data_->incoming_messages_.empty())TriggerAsync();}// 停止接收消息void MessagePort::Stop() {Debug(this, "Stop receiving messages");receiving_messages_ = false;}// JS层调用void MessagePort::Start(const FunctionCallbackInfo<Value>& args) {MessagePort* port;ASSIGN_OR_RETURN_UNWRAP(&port, args.This());if (!port->data_) {return;}port->Start();}void MessagePort::Stop(const FunctionCallbackInfo<Value>& args) {MessagePort* port;CHECK(args[0]->IsObject());ASSIGN_OR_RETURN_UNWRAP(&port, args[0].As<Object>());if (!port->data_) {return;}port->Stop();}// 读取消息void MessagePort::Drain(const FunctionCallbackInfo<Value>& args) {MessagePort* port;ASSIGN_OR_RETURN_UNWRAP(&port, args[0].As<Object>());port->OnMessage();}// 获取某个端口的消息void MessagePort::ReceiveMessage(const FunctionCallbackInfo<Value>& args) {CHECK(args[0]->IsObject());// 第一个参数是端口MessagePort* port = Unwrap<MessagePort>(args[0].As<Object>());// 调用对象的ReceiverMessage方法MaybeLocal<Value> payload =port->ReceiveMessage(port->object()->CreationContext(), false);if (!payload.IsEmpty())args.GetReturnValue().Set(payload.ToLocalChecked());}// 关联两个端口void MessagePort::Entangle(MessagePort* a, MessagePort* b) {Entangle(a, b->data_.get());}void MessagePort::Entangle(MessagePort* a, MessagePortData* b) {MessagePortData::Entangle(a->data_.get(), b);}
14.2.4 MessageChannel
MessageChannel表示线程间通信的两个端。
static void MessageChannel(const FunctionCallbackInfo<Value>& args) {Environment* env = Environment::GetCurrent(args);Local<Context> context = args.This()->CreationContext();Context::Scope context_scope(context);MessagePort* port1 = MessagePort::New(env, context);MessagePort* port2 = MessagePort::New(env, context);MessagePort::Entangle(port1, port2);// port1->object()拿到JS层使用的对象,它关联了MessagePort对象args.This()->Set(context, env->port1_string(), port1->object()).Check();args.This()->Set(context, env->port2_string(), port2->object()).Check();}
MessageChannel的逻辑比较简单,新建两个消息端口,并且关联起来,后续就可以基于这两个端口进行通信了。
Message、MessagePortData、MessagePort和MessageChannel的关系图如图14-2所示。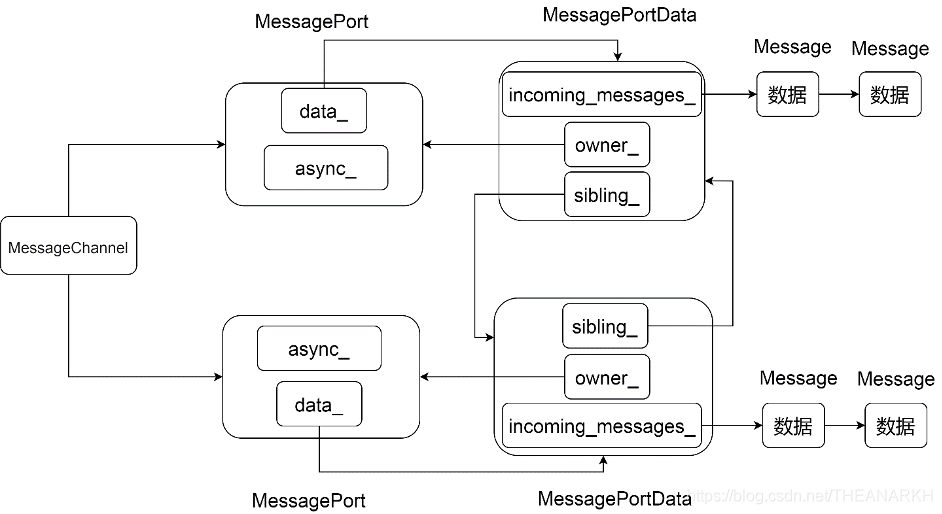
图14-2
最后我们看一下线程间通信模块导出的一些功能。
static void InitMessaging(Local<Object> target,Local<Value> unused,Local<Context> context,void* priv) {Environment* env = Environment::GetCurrent(context);{// 线程间通信的通道Local<String> message_channel_string = FIXED_ONE_BYTE_STRING(env->isolate(),"MessageChannel");Local<FunctionTemplate> templ = env->NewFunctionTemplate(MessageChannel);templ->SetClassName(message_channel_string);target->Set(context,message_channel_string,templ->GetFunction(context).ToLocalChecked()).Check();}// 新建消息端口的构造函数target->Set(context,env->message_port_constructor_string(),GetMessagePortConstructorTemplate(env)->GetFunction(context).ToLocalChecked()).Check();env->SetMethod(target, "stopMessagePort", MessagePort::Stop);env->SetMethod(target, "drainMessagePort", MessagePort::Drain);env->SetMethod(target, "receiveMessageOnPort", MessagePort::ReceiveMessage);env->SetMethod(target, "moveMessagePortToContext",MessagePort::MoveToContext);}
14.3 多线程的实现
本节我们从worker_threads模块开始分析多线程的实现。这是一个C++模块。我们看一下它导出的功能。require(“work_threads”)的时候就是引用了InitWorker函数导出的功能。
void InitWorker(Local<Object> target,Local<Value> unused,Local<Context> context,void* priv) {Environment* env = Environment::GetCurrent(context);{Local<FunctionTemplate> w = env->NewFunctionTemplate(Worker::New);w->InstanceTemplate()->SetInternalFieldCount(1);w->Inherit(AsyncWrap::GetConstructorTemplate(env));// 设置一系列原型方法,就不一一列举env->SetProtoMethod(w, "setEnvVars", Worker::SetEnvVars);// 一系列原型方法/*导出函数模块对应的函数,即我们代码中const { Worker } = require("worker_threads");中的Worker*/Local<String> workerString = FIXED_ONE_BYTE_STRING(env->isolate(), "Worker");w->SetClassName(workerString);target->Set(env->context(),workerString,w->GetFunction(env->context()).ToLocalChecked()).Check();/*导出getEnvMessagePort方法,获取线程接收消息的端口const {getEnvMessagePort} = require("worker_threads");*/env->SetMethod(target, "getEnvMessagePort", GetEnvMessagePort);/*线程id,这个不是操作系统分配的那个,而是Node.js分配的,在创建线程的时候设置const { threadId } = require("worker_threads");*/target->Set(env->context(),env->thread_id_string(),Number::New(env->isolate(),static_cast<double>(env->thread_id()))).Check();/*是否是主线程,const { isMainThread } = require("worker_threads");这边变量在Node.js启动的时候设置为true,新开子线程的时候,没有设置,所以是false*/target->Set(env->context(),FIXED_ONE_BYTE_STRING(env->isolate(), "isMainThread"),Boolean::New(env->isolate(), env->is_main_thread())).Check();/*如果不是主线程,导出资源限制的配置,即在子线程中调用const { resourceLimits } = require("worker_threads");*/if (!env->is_main_thread()) {target->Set(env->context(),FIXED_ONE_BYTE_STRING(env->isolate(),"resourceLimits"),env->worker_context()->GetResourceLimits(env->isolate())).Check();}// 导出几个常量NODE_DEFINE_CONSTANT(target, kMaxYoungGenerationSizeMb);NODE_DEFINE_CONSTANT(target, kMaxOldGenerationSizeMb);NODE_DEFINE_CONSTANT(target, kCodeRangeSizeMb);NODE_DEFINE_CONSTANT(target, kTotalResourceLimitCount);}
了解work_threads模块导出的功能后,我们看在JS层执行new Worker的时候的逻辑。根据上面代码导出的逻辑,我们知道这时候首先会新建一个C对象。然后执行New回调,并传入新建的C对象。我们看New函数的逻辑。我们省略一系列的参数处理,主要代码如下。
// args.This()就是我们刚才传进来的thisWorker* worker = new Worker(env, args.This(),url, per_isolate_opts,std::move(exec_argv_out));
我们再看Worker类的声明。
class Worker : public AsyncWrap {public:// 函数声明private:std::shared_ptr<PerIsolateOptions> per_isolate_opts_;std::vector<std::string> exec_argv_;std::vector<std::string> argv_;MultiIsolatePlatform* platform_;v8::Isolate* isolate_ = nullptr;bool start_profiler_idle_notifier_;// 真正的线程id,底层返回的uv_thread_t tid_;// This mutex protects access to all variables listed below it.mutable Mutex mutex_;bool thread_joined_ = true;const char* custom_error_ = nullptr;int exit_code_ = 0;// 线程id,Node.js分配,不是底层返回的uint64_t thread_id_ = -1;uintptr_t stack_base_ = 0;// 线程资源限制配置double resource_limits_[kTotalResourceLimitCount];void UpdateResourceConstraints(v8::ResourceConstraints* constraints);// 栈信息static constexpr size_t kStackSize = 4 * 1024 * 1024;static constexpr size_t kStackBufferSize = 192 * 1024;std::unique_ptr<MessagePortData> child_port_data_;std::shared_ptr<KVStore> env_vars_;// 用于线程间通信MessagePort* child_port_ = nullptr;MessagePort* parent_port_ = nullptr;// 线程状态bool stopped_ = true;// 是否影响事件循环退出bool has_ref_ = true;// 子线程执行时的环境变量,基类也定义了Environment* env_ = nullptr;};
这里只讲一下env的定义,因为这是一个非常重要的地方。我们看到Worker类继承AsyncWrap,AsyncWrap继承了BaseObject。BaseObject中也定义了env属性。我们看一下在C++中如果子类父类都定义了一个属性时是怎样的。我们来看一个例子
#include <iostream>using namespace std;class A{public:int value;A(){value=1;}void console(){cout<<value<<endl;}};class B: public A{public:int value;B():A(){value=2;}};int main(){B b;// b.value = 3;只会修改子类的,不会修改父类的b.console();cout<<b.value<<endl<<"内存大小:"<<sizeof(b)<<endl;return 0;}
以上代码执行时输出
1
2
内存大小:8
由输出结果我们可以知道,b内存大小是8个字节。即两个int。所以b的内存布局中两个a属性都分配了内存。当我们通过b.console输出value时,因为console是在A上定义的,所以输出1,但是我们通过b.value访问时,输出的是2。因为访问的是B中定义的value,同理如果我们在B中定义console,输出也会是2。Worker中定义的env_我们后续会看到它的作用。接着我们看一下Worker类的初始化逻辑。
Worker::Worker(Environment* env,Local<Object> wrap,...): AsyncWrap(env, wrap, AsyncWrap::PROVIDER_WORKER),...// 分配线程idthread_id_(Environment::AllocateThreadId()),// 继承主线程的环境变量env_vars_(env->env_vars()) {// 新建一个端口和子线程通信parent_port_ = MessagePort::New(env, env->context());/*关联起来,用于通信const parent_port_ = {data: {sibling: null}};const child_port_data_ = {sibling: null};parent_port_.data.sibling = child_port_data_;child_port_data_.sibling = parent_port_.data;*/child_port_data_ = std::make_unique<MessagePortData>(nullptr);MessagePort::Entangle(parent_port_, child_port_data_.get());// 设置JS层Worker对象的messagePort属性为parent_port_object()->Set(env->context(),env->message_port_string(),parent_port_->object()).Check();// 设置Worker对象的线程id,即threadId属性object()->Set(env->context(),env->thread_id_string(),Number::New(env->isolate(), static_cast<double>(thread_id_))).Check();}
新建一个Worker,结构如图14-3所示。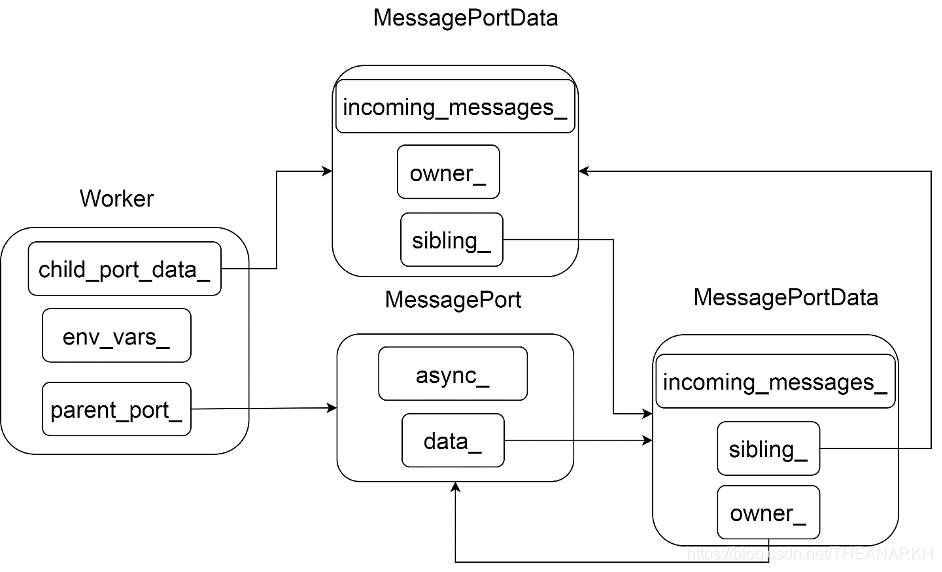
图14-3
了解了new Worker的逻辑后,我们看在JS层是如何使用的。我们看JS层Worker类的构造函数。
constructor(filename, options = {}) {super();// 忽略一系列参数处理,new Worker就是上面提到的C++层的this[kHandle] = new Worker(url, options.execArgv, parseResourceLimits(options.resourceLimits));// messagePort指向_parent_portthis[kPort] = this[kHandle].messagePort;this[kPort].on('message', (data) => this[kOnMessage](data));// 开始接收消息this[kPort].start();// 申请一个通信通道,两个端口const { port1, port2 } = new MessageChannel();this[kPublicPort] = port1;this[kPublicPort].on('message', (message) => this.emit('message', message));// 向另一端发送消息this[kPort].postMessage({argv,type: messageTypes.LOAD_SCRIPT,filename,doEval: !!options.eval,cwdCounter: cwdCounter || workerIo.sharedCwdCounter,workerData: options.workerData,publicPort: port2,manifestSrc: getOptionValue('--experimental-policy') ?require('internal/process/policy').src :null,hasStdin: !!options.stdin}, [port2]);// 开启线程this[kHandle].startThread();}
上面的代码主要逻辑如下
1 保存messagePort,监听该端口的message事件,然后给messagePort的对端发送消息,但是这时候还没有接收端口,所以消息会缓存到MessagePortData,即childport_data 中。另外我们看到主线程把通信端口port2发送给了子线程。
2 申请一个通信通道port1和port2,用于主线程和子线程通信。_parent_port和child_port是给Node.js使用的,新申请的端口是给用户使用的。
3 创建子线程。
我们看创建线程的时候,做了什么。
void Worker::StartThread(const FunctionCallbackInfo<Value>& args) {Worker* w;ASSIGN_OR_RETURN_UNWRAP(&w, args.This());Mutex::ScopedLock lock(w->mutex_);// The object now owns the created thread and should not be garbage collected// until that finishes.w->ClearWeak();// 加入主线程维护的子线程数据结构w->env()->add_sub_worker_context(w);w->stopped_ = false;w->thread_joined_ = false;// 是否需要阻塞事件循环退出,默认trueif (w->has_ref_)w->env()->add_refs(1);// 是否需要栈和栈大小uv_thread_options_t thread_options;thread_options.flags = UV_THREAD_HAS_STACK_SIZE;thread_options.stack_size = kStackSize;// 创建线程CHECK_EQ(uv_thread_create_ex(&w->tid_, &thread_options, [](void* arg) {Worker* w = static_cast<Worker*>(arg);const uintptr_t stack_top = reinterpret_cast<uintptr_t>(&arg);w->stack_base_ = stack_top - (kStackSize - kStackBufferSize);// 执行主逻辑w->Run();Mutex::ScopedLock lock(w->mutex_);// 给主线程提交一个任务,通知主线程子线程执行完毕,因为主线程不能直接执行join阻塞自己w->env()->SetImmediateThreadsafe([w = std::unique_ptr<Worker>(w)](Environment* env) {if (w->has_ref_)env->add_refs(-1);w->JoinThread();// implicitly delete w});}, static_cast<void*>(w)), 0);}
StartThread新建了一个子线程,然后在子线程中执行Run,我们继续看Run
void Worker::Run() {// 线程执行所需要的数据结构,比如loop,isolate,和主线程独立WorkerThreadData data(this);{Locker locker(isolate_);Isolate::Scope isolate_scope(isolate_);SealHandleScope outer_seal(isolate_);// std::unique_ptr<Environment, FreeEnvironment> env_;DeleteFnPtr<Environment, FreeEnvironment> env_;// 线程执行完后执行的清除函数auto cleanup_env = OnScopeLeave([&]() {// ...});{HandleScope handle_scope(isolate_);Local<Context> context;// 新建一个context,和主线程独立context = NewContext(isolate_);Context::Scope context_scope(context);{// 新建一个env并初始化,env中会和新的context关联env_.reset(new Environment(data.isolate_data_.get(),context,std::move(argv_),std::move(exec_argv_),Environment::kNoFlags,thread_id_));env_->set_env_vars(std::move(env_vars_));env_->set_abort_on_uncaught_exception(false);env_->set_worker_context(this);env_->InitializeLibuv(start_profiler_idle_notifier_);}{Mutex::ScopedLock lock(mutex_);// 更新子线程所属的envthis->env_ = env_.get();}{if (!env_->RunBootstrapping().IsEmpty()) {CreateEnvMessagePort(env_.get());USE(StartExecution(env_.get(), "internal/main/worker_thread"));}}{SealHandleScope seal(isolate_);bool more;// 开始事件循环do {if (is_stopped()) break;uv_run(&data.loop_, UV_RUN_DEFAULT);if (is_stopped()) break;platform_->DrainTasks(isolate_);more = uv_loop_alive(&data.loop_);if (more && !is_stopped()) continue;EmitBeforeExit(env_.get());more = uv_loop_alive(&data.loop_);} while (more == true && !is_stopped());}}}
我们分步骤分析上面的代码
1 新建Isolate、context和Environment,子线程在独立的环境执行。然后初始化Environment。这个在Node.js启动过程章节已经分析过,不再分析。
2 更新子线程的env。刚才已经分析过,Worker类中定义了env属性,所以这里通过this.env更新时,是不会影响基类(BaseObject)中的值的。因为子线程是在新的环境执行的,所以在新环境中使用该Worker实例时,需要使用新的环境变量。而在主线程使用该Worker实例时,是通过BaseObject的env()访问的。从而获取的是主线程的环境。因为Worker实例是在主线程和子线程之间共享的,Node.js在Worker类中重新定义了一个env属性正是为了解决这个问题。
3 CreateEnvMessagePort
void Worker::CreateEnvMessagePort(Environment* env) {child_port_ = MessagePort::New(env,env->context(),std::move(child_port_data_));if (child_port_ != nullptr)env->set_message_port(child_port_->object(isolate_));}
childport_data这个变量刚才我们已经看到过,在这里首先申请一个新的端口。并且和childport_data互相关联起来。然后在env缓存起来。后续会使用。这时候的关系图如图14-4所示。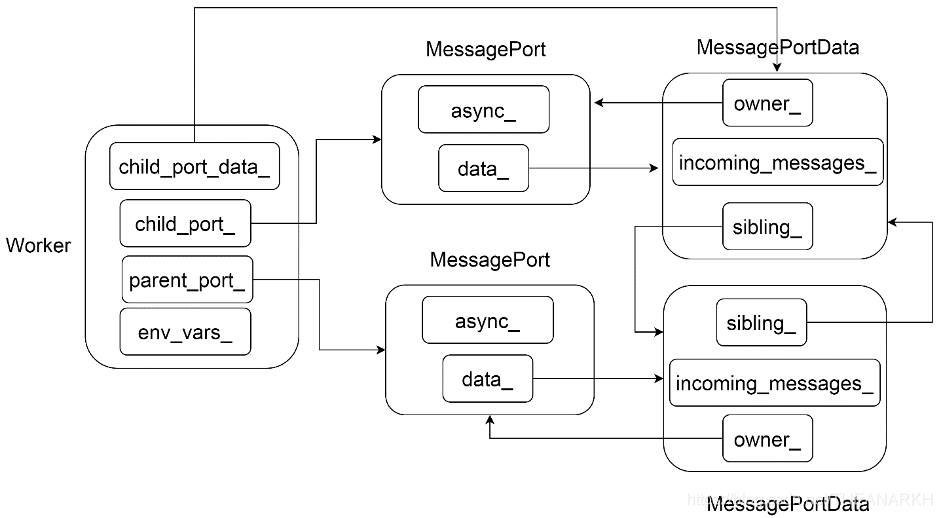
图14-4
4 执行internal/main/worker_thread.js
// 设置process对象patchProcessObject();// 获取刚才缓存的端口child_port_onst port = getEnvMessagePort();port.on('message', (message) => {// 加载脚本if (message.type === LOAD_SCRIPT) {const {argv,cwdCounter,filename,doEval,workerData,publicPort,manifestSrc,manifestURL,hasStdin} = message;const CJSLoader = require('internal/modules/cjs/loader');loadPreloadModules();/*由主线程申请的MessageChannel中某一端的端口,主线程传递过来的,保存用于和主线程通信*/publicWorker.parentPort = publicPort;// 执行时使用的数据publicWorker.workerData = workerData;// 通知主线程,正在执行脚本port.postMessage({ type: UP_AND_RUNNING });// 执行new Worker(filename)时传入的文件CJSLoader.Module.runMain(filename);})// 开始接收消息port.start()
我们看到worker_thread.js中通过runMain完成了子线程的代码执行,然后开始事件循环。
我们看一下当事件循环结束时,Node.js的逻辑。
// 给主线程提交一个任务,通知主线程子线程执行完毕,因为主线程不能直接执行join阻塞自己w->env()->SetImmediateThreadsafe([w = std::unique_ptr<Worker>(w)](Environment* env) {if (w->has_ref_)env->add_refs(-1);w->JoinThread();// implicitly delete w});}, static_cast<void*>(w)), 0);
通过w->env()获取的是主线程的执行环境。我们看一下SetImmediateThreadsafe。
template <typename Fn>void Environment::SetImmediateThreadsafe(Fn&& cb) {auto callback = std::make_unique<NativeImmediateCallbackImpl<Fn>>(std::move(cb), false);{Mutex::ScopedLock lock(native_immediates_threadsafe_mutex_);native_immediates_threadsafe_.Push(std::move(callback));}uv_async_send(&task_queues_async_);}
SetImmediateThreadsafe用于通知执行环境所在的事件循环有异步任务完成。并且是线程安全的。因为可能有多个线程会操作nativeimmediates_threadsafe。在主线程事件循环的Poll IO阶段就会执行taskqueues_async回调。我们看一下taskqueues_async对应的回调。
uv_async_init(event_loop(),&task_queues_async_,[](uv_async_t* async) {Environment* env = ContainerOf(&Environment::task_queues_async_, async);env->CleanupFinalizationGroups();env->RunAndClearNativeImmediates();});
所以在Poll IO阶段执行的回调是RunAndClearNativeImmediates
void Environment::RunAndClearNativeImmediates(bool only_refed) {TraceEventScope trace_scope(TRACING_CATEGORY_NODE1(environment),"RunAndClearNativeImmediates", this);size_t ref_count = 0;if (native_immediates_threadsafe_.size() > 0) {Mutex::ScopedLock lock(native_immediates_threadsafe_mutex_);native_immediates_.ConcatMove(std::move(native_immediates_threadsafe_));}auto drain_list = [&]() {TryCatchScope try_catch(this);DebugSealHandleScope seal_handle_scope(isolate());while (std::unique_ptr<NativeImmediateCallback> head =native_immediates_.Shift()) {if (head->is_refed())ref_count++;if (head->is_refed() || !only_refed)// 执行回调head->Call(this);head.reset();};}
RunAndClearNativeImmediates会执行队列里的回调。对应Worker的JoinThread
void Worker::JoinThread() {// 阻塞等待子线程结束,执行到这子线程已经结束了CHECK_EQ(uv_thread_join(&tid_), 0);thread_joined_ = true;// 从主线程数据结构中删除该线程对应的实例env()->remove_sub_worker_context(this);{HandleScope handle_scope(env()->isolate());Context::Scope context_scope(env()->context());// Reset the parent port as we're closing it now anyway.object()->Set(env()->context(),env()->message_port_string(),Undefined(env()->isolate())).Check();// 子线程退出码Local<Value> args[] = {Integer::New(env()->isolate(), exit_code_),custom_error_ != nullptr ?OneByteString(env()->isolate(), custom_error_).As<Value>() :Null(env()->isolate()).As<Value>(),};// 执行JS层回调,触发exit事件MakeCallback(env()->onexit_string(), arraysize(args), args);}}
最后我们看一下如果结束正在执行的子线程。在JS中我能可以通过terminate函数终止线程的执行。
terminate(callback) {this[kHandle].stopThread();}Terminate是对C++模块stopThread的封装。void Worker::StopThread(const FunctionCallbackInfo<Value>& args) {Worker* w;ASSIGN_OR_RETURN_UNWRAP(&w, args.This());w->Exit(1);}void Worker::Exit(int code) {Mutex::ScopedLock lock(mutex_);// env_是子线程执行的envif (env_ != nullptr) {exit_code_ = code;Stop(env_);} else {stopped_ = true;}}int Stop(Environment* env) {env->ExitEnv();return 0;}void Environment::ExitEnv() {set_can_call_into_js(false);set_stopping(true);isolate_->TerminateExecution();SetImmediateThreadsafe([](Environment* env) { uv_stop(env->event_loop()); });}
我们看到主线程最终通过SetImmediateThreadsafe给子线程所属的env提交了一个任务。子线程在Poll IO阶段会设置停止事件循环的标记,等到下一次事件循环开始的时候,就会跳出事件循环从而结束子线程的执行。
14.4 线程间通信
本节我们看一下线程间通信的过程。
const { Worker, isMainThread, parentPort } = require('worker_threads');if (isMainThread) {const worker = new Worker(__filename);worker.once('message', (message) => {...});worker.postMessage('Hello, world!');} else {// 做点耗时的事情parentPort.once('message', (message) => {parentPort.postMessage(message);});}
我们知道isMainThread在子线程里是false,parentPort就是messageChannel中的一端。用于和主线程通信,所以parentPort.postMessage给对端发送消息,就是给主线程发送消息,我们再看看worker.postMessage(‘Hello, world!’)。
postMessage(...args) {this[kPublicPort].postMessage(...args);}
kPublicPort指向的就是messageChannel的一端。this[kPublicPort].postMessage(…args)即给另一端发送消息。我们看一下postMessage的实现。
void MessagePort::PostMessage(const FunctionCallbackInfo<Value>& args) {Environment* env = Environment::GetCurrent(args);Local<Object> obj = args.This();Local<Context> context = obj->CreationContext();TransferList transfer_list;if (args[1]->IsObject()) {// 处理transfer_list}// 拿到JS层使用的对象所关联的MessagePortMessagePort* port = Unwrap<MessagePort>(args.This());port->PostMessage(env, args[0], transfer_list);}
我们接着看port->PostMessage
Maybe<bool> MessagePort::PostMessage(Environment* env,Local<Value> message_v,const TransferList& transfer_v) {Isolate* isolate = env->isolate();Local<Object> obj = object(isolate);Local<Context> context = obj->CreationContext();Message msg;// 序列化Maybe<bool> serialization_maybe =msg.Serialize(env, context, message_v, transfer_v, obj);// 拿到操作对端sibling的锁Mutex::ScopedLock lock(*data_->sibling_mutex_);// 把消息插入到对端队列data_->sibling_->AddToIncomingQueue(std::move(msg));return Just(true);}
PostMessage通过AddToIncomingQueue把消息插入对端的消息队列我们看一下AddToIncomingQueue
void MessagePortData::AddToIncomingQueue(Message&& message) {// 加锁操作消息队列Mutex::ScopedLock lock(mutex_);incoming_messages_.emplace_back(std::move(message));// 通知ownerif (owner_ != nullptr) {owner_->TriggerAsync();}}
插入消息队列后,如果有关联的端口,则会通知Libuv。我们继续看TriggerAsync。
void MessagePort::TriggerAsync() {if (IsHandleClosing()) return;CHECK_EQ(uv_async_send(&async_), 0);}
Libuv在Poll IO阶段就会执行对应的回调。回调是在new MessagePort时设置的。
auto onmessage = [](uv_async_t* handle) {MessagePort* channel = ContainerOf(&MessagePort::async_, handle);channel->OnMessage();};// 初始化async结构体,实现异步通信CHECK_EQ(uv_async_init(env->event_loop(),&async_,onmessage), 0);
我们继续看OnMessage。
void MessagePort::OnMessage() {HandleScope handle_scope(env()->isolate());Local<Context> context = object(env()->isolate())->CreationContext();// 接收消息条数的阈值size_t processing_limit;{// 加锁操作消息队列Mutex::ScopedLock(data_->mutex_);processing_limit = std::max(data_->incoming_messages_.size(),static_cast<size_t>(1000));}while (data_) {// 读取的条数达到阈值,通知Libuv下一轮Poll IO阶段继续读if (processing_limit-- == 0) {// 通知事件循环TriggerAsync();return;}HandleScope handle_scope(env()->isolate());Context::Scope context_scope(context);Local<Value> payload;// 读取消息if (!ReceiveMessage(context, true).ToLocal(&payload)) break;// 没有了if (payload == env()->no_message_symbol()) break;Local<Object> event;Local<Value> cb_args[1];// 新建一个MessageEvent对象,回调onmessage事件if (!env()->message_event_object_template()->NewInstance(context).ToLocal(&event) ||event->Set(context, env()->data_string(), payload).IsNothing() ||event->Set(context, env()->target_string(), object()).IsNothing() ||(cb_args[0] = event, false) ||MakeCallback(env()->onmessage_string(),arraysize(cb_args),cb_args).IsEmpty()) {// 如果回调失败,通知Libuv下次继续读if (data_)TriggerAsync();return;}}}
我们看到这里会不断地调用ReceiveMessage读取数据,然后回调JS层。直到达到阈值或者回调失败。我们看一下ReceiveMessage的逻辑。
MaybeLocal<Value> MessagePort::ReceiveMessage(Local<Context> context,bool only_if_receiving) {Message received;{// Get the head of the message queue.// 互斥访问消息队列Mutex::ScopedLock lock(data_->mutex_);bool wants_message = receiving_messages_ || !only_if_receiving;// 没有消息、不需要接收消息、消息是关闭消息if (data_->incoming_messages_.empty() ||(!wants_message &&!data_->incoming_messages_.front().IsCloseMessage())) {return env()->no_message_symbol();}// 获取队列第一个消息received = std::move(data_->incoming_messages_.front());data_->incoming_messages_.pop_front();}// 是关闭消息则关闭端口if (received.IsCloseMessage()) {Close();return env()->no_message_symbol();}// 反序列化后返回return received.Deserialize(env(), context);}
ReceiveMessage会消息进行反序列化返回。以上就是线程间通信的整个过程。具体步骤如图14-5所示。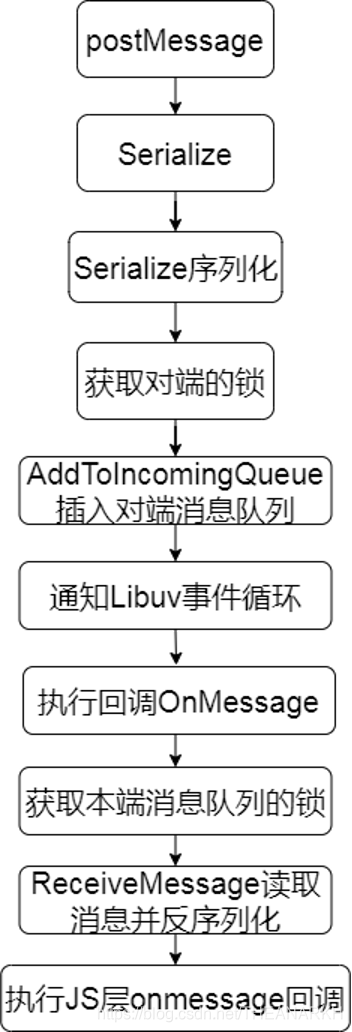
图14-5

若有收获,就点个赞吧
0 人点赞
