看DeblurGAN-v2: Deblurring (Orders-of-Magnitude) Faster and Better中说:
To take advantage of both global and local features, we propose to use a double-scale discriminator, consisting of one local branch that operates on patch levels like [13] did, and the other global branch that feeds the full input image.
而在其开源代码中两个discriminator喂的都是full Image,就觉得受到了欺骗。
后来又去看了它引用的论文[13]Image-to-image translation with conditional adversarial networks中关于patch_gan的部分:
Isola et al. [13] propose to use a PatchGAN discriminator which operates on the images patches of size 70 × 70, that proves to produce sharper results than the standard “global” discriminator that operates on the full image.
Patch Gan中说对7070的patch进行判别,用于保持高细节。这个7070的来源搞不懂。
本文针对pix2pix的patch gan进行解释。
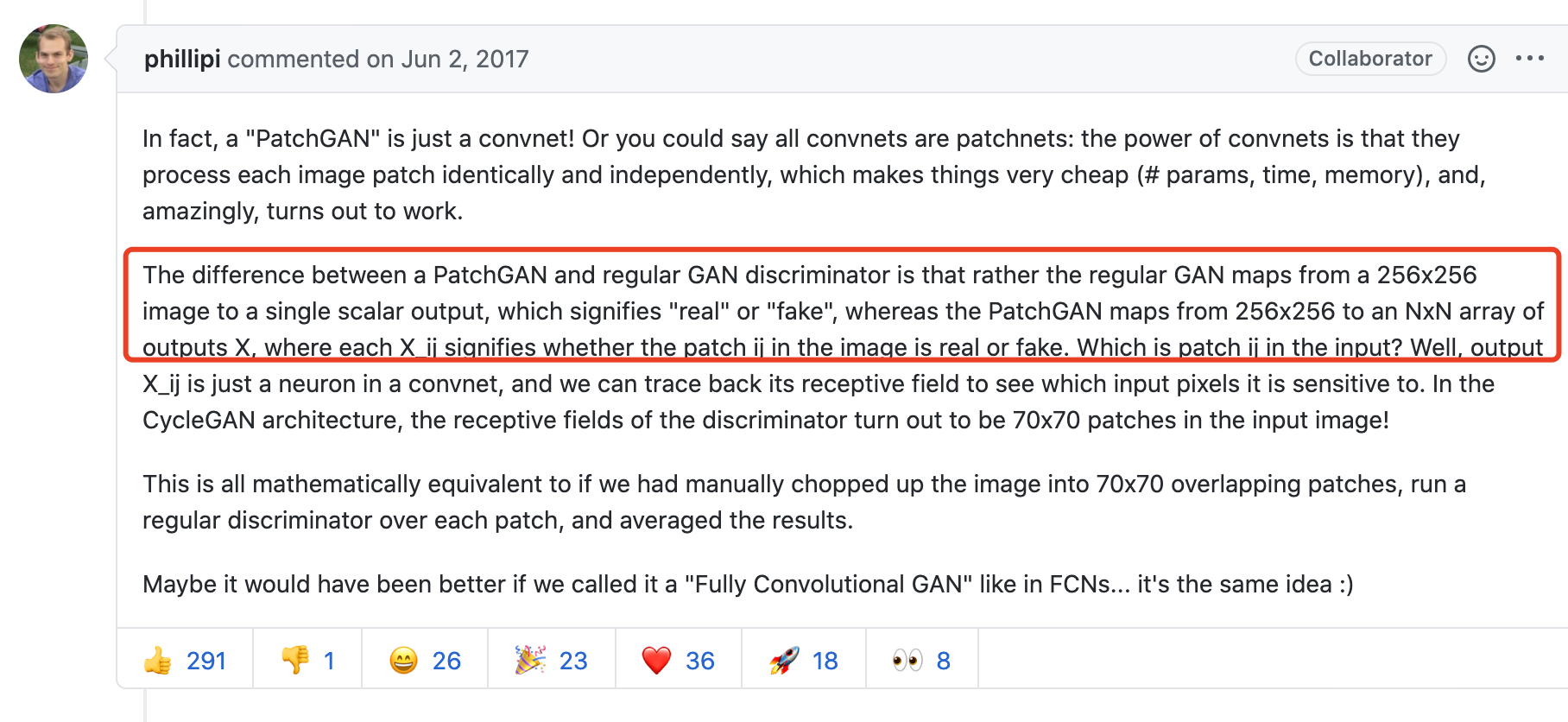
常规判别器是从一张图像得到True / False的评价,而patchGAN则是从一张图像映射到一个MxN的矩阵。由于该判别器的感受野是70x70,因此相当于每个70*70的patch对应一个评价。
70*70的计算来源:
def f(output_size, ksize, stride):return (output_size - 1) * stride + ksizelast_layer = f(output_size=1, ksize=4, stride=1)# Receptive field: 4fourth_layer = f(output_size=last_layer, ksize=4, stride=1)# Receptive field: 7third_layer = f(output_size=fourth_layer, ksize=4, stride=2)# Receptive field: 16second_layer = f(output_size=third_layer, ksize=4, stride=2)# Receptive field: 34first_layer = f(output_size=second_layer, ksize=4, stride=2)# Receptive field: 70print(f'最后一层感受域大小:{last_layer}')print(f'第一层感受域大小:{first_layer}')#最后一层感受域大小:4#第一层感受域大小:70
ksize 卷积核大小
PatchGAN代码:
# Defines the PatchGAN discriminator with the specified arguments.
class NLayerDiscriminator(nn.Module):
def __init__(self, input_nc=3, ndf=64, n_layers=3, norm_layer=nn.BatchNorm2d, use_sigmoid=False, use_parallel=True):
super(NLayerDiscriminator, self).__init__()
self.use_parallel = use_parallel
if type(norm_layer) == functools.partial:
use_bias = norm_layer.func == nn.InstanceNorm2d
else:
use_bias = norm_layer == nn.InstanceNorm2d
kw = 4
padw = int(np.ceil((kw-1)/2))
sequence = [
nn.Conv2d(input_nc, ndf, kernel_size=kw, stride=2, padding=padw),
nn.LeakyReLU(0.2, True)
]
nf_mult = 1
for n in range(1, n_layers):
nf_mult_prev = nf_mult
nf_mult = min(2**n, 8)
sequence += [
nn.Conv2d(ndf * nf_mult_prev, ndf * nf_mult,
kernel_size=kw, stride=2, padding=padw, bias=use_bias),
norm_layer(ndf * nf_mult),
nn.LeakyReLU(0.2, True)
]
nf_mult_prev = nf_mult
nf_mult = min(2**n_layers, 8)
sequence += [
nn.Conv2d(ndf * nf_mult_prev, ndf * nf_mult,
kernel_size=kw, stride=1, padding=padw, bias=use_bias),
norm_layer(ndf * nf_mult),
nn.LeakyReLU(0.2, True)
]
sequence += [nn.Conv2d(ndf * nf_mult, 1, kernel_size=kw, stride=1, padding=padw)]
if use_sigmoid:
sequence += [nn.Sigmoid()]
self.model = nn.Sequential(*sequence)
def forward(self, input):
return self.model(input)
参考:
https://github.com/junyanz/pytorch-CycleGAN-and-pix2pix/issues/39
https://blog.csdn.net/xiaoxifei/article/details/86506955
https://blog.csdn.net/weixin_35576881/article/details/88058040 感受野计算
https://medium.com/@sahiltinky94/understanding-patchgan-9f3c8380c207 这个讲了感受野怎么计算

若有收获,就点个赞吧
0 人点赞
