Floyd判圈算法(Floyd Cycle Detection Algorithm),又称龟兔赛跑算法(Tortoise and Hare Algorithm),是一个可以在有限状态机、迭代函数或者链表上判断是否存在环,求出该环的起点与长度的算法。
判环
我们定义两个指针,一快一慢,慢指针每次走一步,快指针每次走两步;当两个指针从链表的同一节点开始移动时,若链表中无环,则快指针一直在慢指针前;否则,快指针会先于慢指针入环,且会在慢指针跑满环中一圈之前,追上快指针!。
slow=head,fast=head;while(fast!=nullptr){if(fast->next==nullptr)return false;fast=fast->next->next;slow=slow->next;if(fast==slow)return true;}return false;
求环的起点与长度
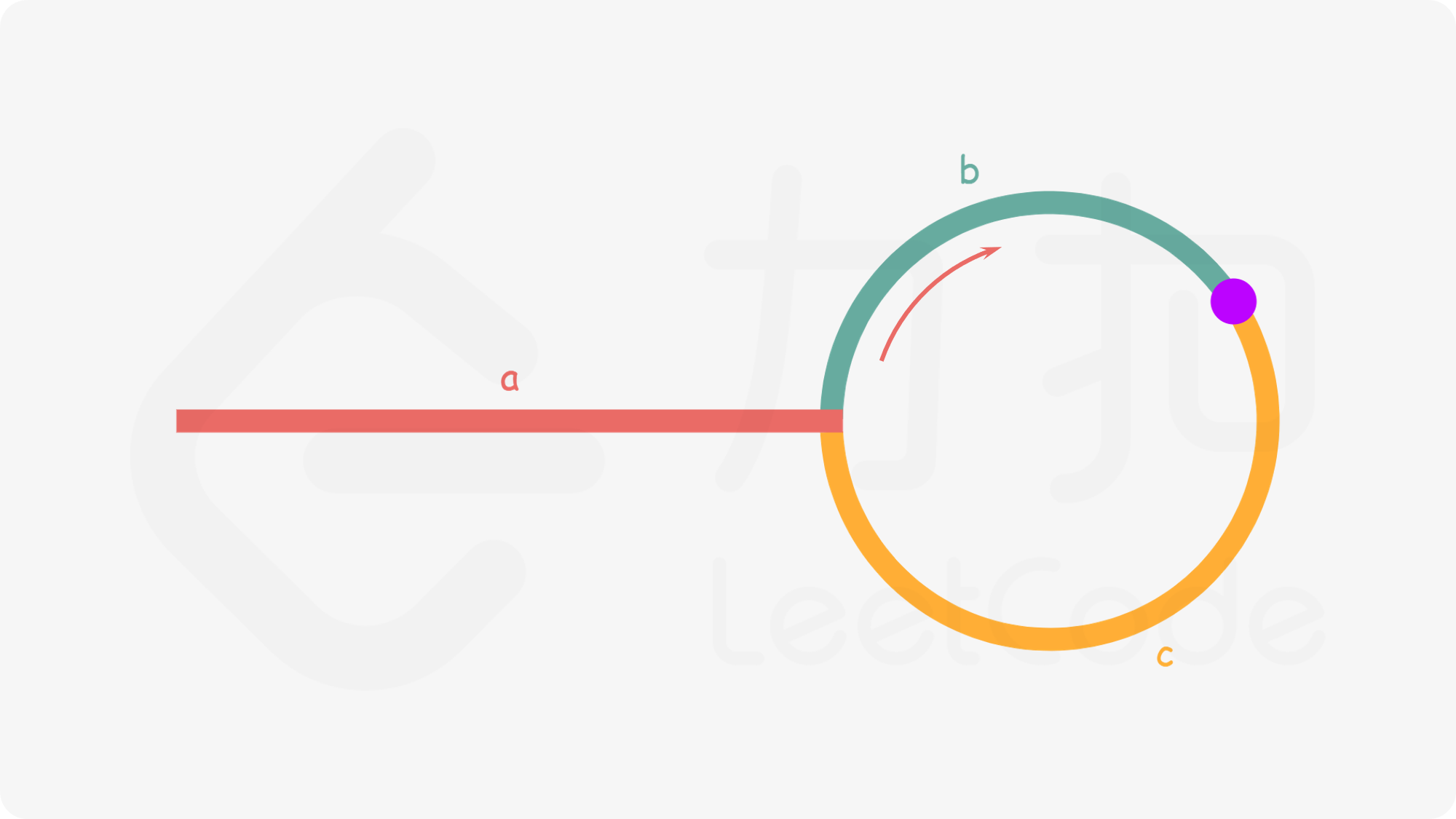
基于Floyd判圈算法, 设置快慢指针fast和slow,假设fast和slow在P点相遇,且fast已跑n圈,可得出如下结论

联立后,可得出
即环外距离等于【相遇点与环起点距离c】和【多圈环长度】之和
故当快慢指针相遇时,设置新ptr指针指向头结点。并令ptr和slow指针同步运动,直到两指针相遇时,便为环的起点。
{auto slow=head,fast=head;while(fast!=nullptr){if(fast->next==nullptr)return nullptr;fast=fast->next->next;slow=slow->next;if(fast==slow){auto ptr=head;while(ptr!=slow){slow=slow->next;ptr=ptr->next;}return ptr;}}return nullptr;}

若有收获,就点个赞吧
0 人点赞
