HashMap 是一个非常重要的集合,其本质上是一个散列表,那么就离不开散列表的三大问题:散列函数、哈希冲突、扩容方案;同时作为一个数据结构,必须考虑多线程并发访问的问题,也就是线程安全。这四个点是学习 HashMap 的重点,也是 HashMap 设计的重点。
HashMap 并不是全能的,对于一些特殊场景下的需求官方拓展了一些其他的类来满足,比如线程安全的 ConcurrentHashMap、记录插入顺序的 LinkHashMap、给 key 排序的 TreeMap 等。
LinkedHashMap 通常提供的是遍历顺序符合插入顺序,它的实现是通过为键值对维护一个双向链表。这种行为适用于一些特定应用场景,例如,我们构建一个空间占用敏感的资源池,希望可以自动将最不常被访问的对象释放掉,这就可以利用 LinkedHashMap 提供的机制来实现,参考下面的示例:
LinkedHashMap<String, String> accessOrderedMap = new LinkedHashMap<String, String>(16, 0.75F, true){@Overrideprotected boolean removeEldestEntry(Map.Entry<String, String> eldest) { // 实现自定义删除策略,否则行为就和普遍Map没有区别return size() > 3;}};
存储结构
HashMap 的存储结构是由数组 + 链表 + 红黑树(JDK 8 增加了红黑树部分)实现的。每个数组元素上都一个链表结构,当数据被 hash 后,得到数组索引下标,把数据放在对应下标元素的链表上。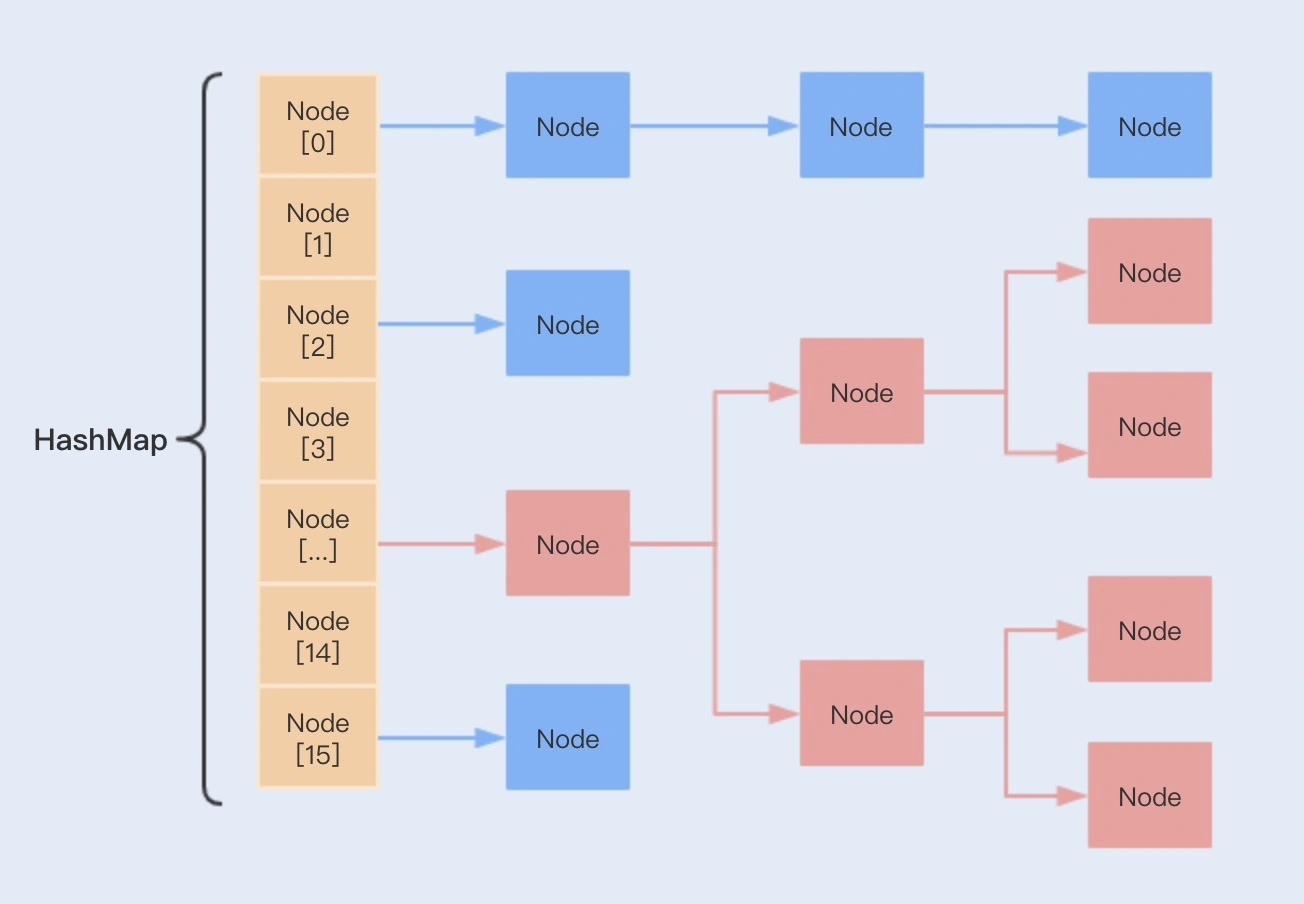
JDK 1.8 的 HashMap 相比于 JDK 1.7 有了很多变化,具体如下:
- Entry 结构变成了 Node 结构,hash 变量加上了 final 声明,即不可以进行 rehash 了。
- put() 的时候插入节点的方式从头插法变成了尾插法。
- 引入了红黑树,避免链表过长导致的效率下降。
- 扩容方法的优化,不需要重新计算 hash 值,并且从头插法改成了尾插法。
其中,Node 是 HashMap 的一个内部类,实现了 Map.Entry 接口,本质是就是一个键值对。
static class Node<K,V> implements Map.Entry<K,V> {// 用来定位数组索引位置final int hash;final K key;V value;// 链表的下一个Node节点Node<K,V> next;}
并且 HashMap 内部维护了一个 Node 数组,用来存储 Node 元素,该数组在第一次使用时被初始化。
// 默认负载因子static final float DEFAULT_LOAD_FACTOR = 0.75f;// 链表转红黑树最小阈值static final int TREEIFY_THRESHOLD = 8;// 红黑树退化成链表最小阈值static final int UNTREEIFY_THRESHOLD = 6;// 链表转红黑树最小容量static final int MIN_TREEIFY_CAPACITY = 64;// Node数组,用来存储元素transient Node<K,V>[] table;transient Set<Map.Entry<K,V>> entrySet;// 当前实际存在的key-value对数量transient int size;// HashMap在结构上修改的次数,此字段用于对集合迭代过程中的修改进行快速失败,见ConcurrentModificationExceptiontransient int modCount;// 所能容纳的key-value对极限,超过阈值则需要扩容int threshold;// 负载因子,它使hashmap在node节点快用满的时候就进行扩容,避免可用节点太少,导致链表过长final float loadFactor;
table 数组的初始化长度默认是 16,loadFactor 默认值是 0.75。
threshold 代表 HashMap 所能容纳的最大数量的 Node 数。threshold = table.length * loadFactor。在存取数据的过程中,当 Node 节点的数量大于 threshold 阈值时,就会进行扩容,扩容后 HashMap 的容量是之前容量的两倍。
modCount 用来记录 HashMap 内部结构发生变化的次数,主要用于迭代的快速失败。内部结构发生变化指的是结构发生变化,例如 put 新键值对,但是某个 key 对应的 value 值被覆盖不属于结构变化。
当链表过长(默认超过8)且当前容量大于可以转化红黑树的最小容量时,链表就会转换为红黑树,利用红黑树快速插入、删除、查找的特点提高 HashMap 的性能。否则进行 resize() 扩容,当链表长度变小(默认小于6)时,红黑树转为链表。
哈希函数
HashMap 中的哈希计算逻辑会取 key 的 hashCode 值、高位运算、取模运算,得到 hash 值再计算下标。这种算法即减少系统开销,又有效减少 Hash 碰撞。因为有些数据计算出的哈希值差异主要在高位,而 HashMap 里的哈希寻址是忽略容量以上的高位的,那么这种处理就可以有效避免类似情况下的哈希碰撞
static final int hash(Object key) {int h;return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);}
之后,通过 (n-1)&hash 计算数组下标,其中 n 为数组长度
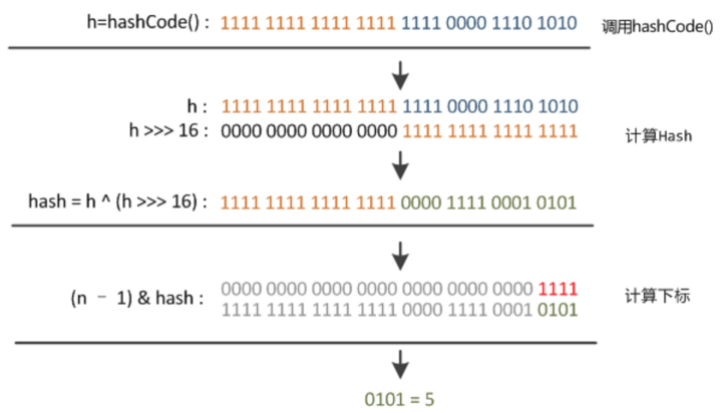
key.hashCode() 函数调用的是 key 键自带的哈希函数,返回 int 型散列值。理论上散列值是一个 int 型,如果直接拿散列值作为下标访问 HashMap 数组的话,考虑到 2 进制 32 位带符号的 int 值范围从 -2147483648 到 2147483648。前后加起来大概 40 亿的映射空间。只要哈希函数映射得比较均匀松散,一般应用是很难出现碰撞的。但问题是一个 40 亿长度的数组,内存是放不下的,所以这个散列值是不能直接拿来用的。
为什么要右移 16 位?
上面先右位移(>>>) 16 位,正好是 32bit 的一半,然后自己的高半区和低半区做异或(^),就是为了混合原始哈希码的高位和低位,以此来加大低位的随机性。由于混合后的低位掺杂了高位的部分特征,这样高位的信息也被变相保留下来。而且(^)这个符号生成的 0、1 值是比较平均的,各 50% 的几率(10、01 都是 1,11、00 都是 0),而位与(&)或位或(|)都是 25%、75% 的几率。
为什么要混合高位?
因为计算出哈希值后,我们还需要对 2 的幂次大小的数组进行一次取模计算,而对二的幂次取模相当于直接截取数字比较低的若干位,这在数组元素较少的时候,相当于只使用了数字比较低位的信息,而放弃了高位的信息,可能会增加冲突的概率。所以,JDK 的代码引入了^ h >>> 16 这样的位运算,这样我们在后续的取模时就可以用到高位的信息了。
1. 控制数组长度为2的整数次幂
HashMap 的 Entry 数组长度总是为 2 的整数次幂,那 HashMap 是如何进行控制的呢?
在 HashMap 中,修改数组长度总共有两种情况:
- 初始化时指定的数组长度
- 扩容时的长度增量
先看第一种情况。默认情况下,如未在 HashMap 构造器中指定长度时,默认初始长度为 16。16 是一个较为合适的经验值,太小会频繁触发扩容,太大又会浪费空间。如果在构造函数中指定一个非 2 的整数次幂的值,则会自动转化成大于该指定数的最小 2 的整数次幂。具体见 HashMap 调用的 tableSizeFor() 方法。
public HashMap(int initialCapacity, float loadFactor) {......this.loadFactor = loadFactor;this.threshold = tableSizeFor(initialCapacity);}static final int tableSizeFor(int cap) {int n = cap - 1;n |= n >>> 1;n |= n >>> 2;n |= n >>> 4;n |= n >>> 8;n |= n >>> 16;return (n < 0) ? 1 : (n >= MAXIMUM_CAPACITY) ? MAXIMUM_CAPACITY : n + 1;}
tableSizeFor() 方法看起来很复杂,作用是使得最高位 1 后续的所有位都变为 1,最后再加 1 则得到刚好大于 initialCapacity 的最小 2 的整数次幂数。如下图(这里使用了 8 位进行模拟,32 位也是同理):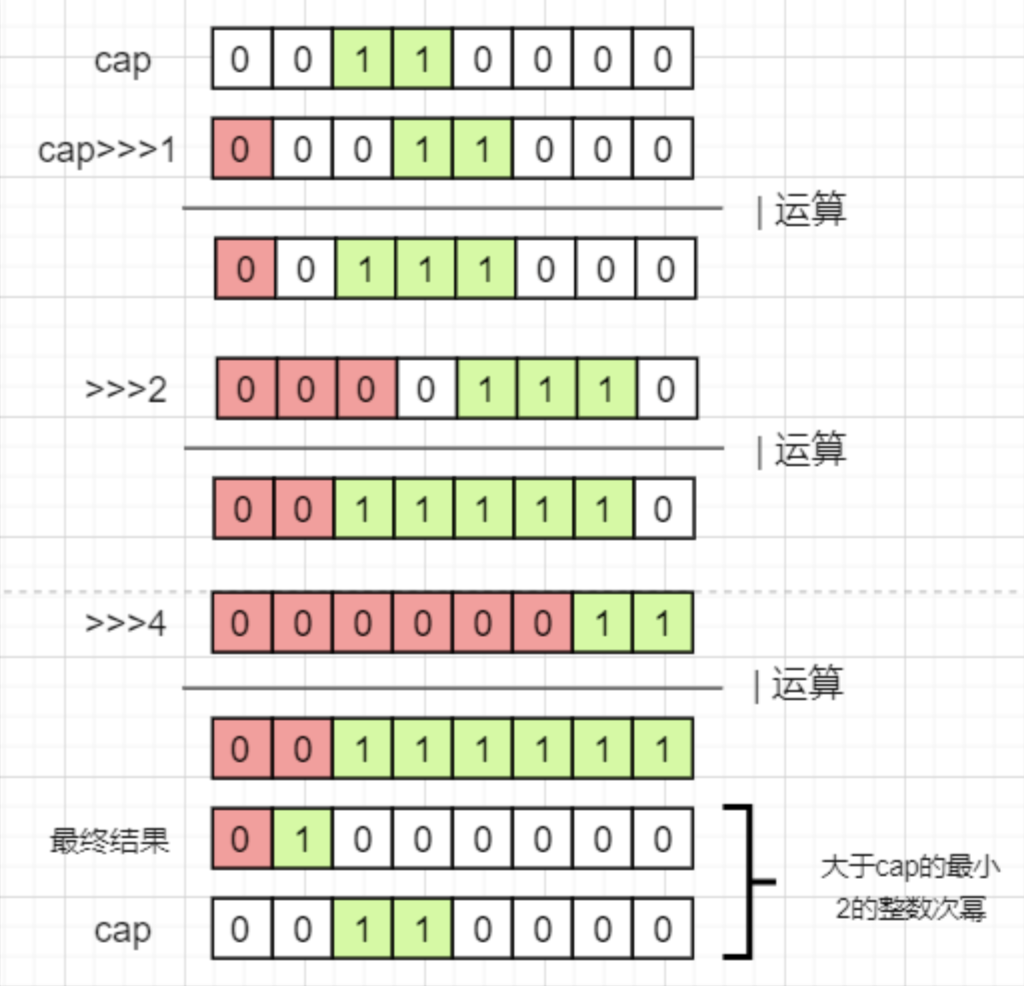
那为什么必须要对 cap 进行减 1 之后再进行运算呢?因为如果指定的数刚好是 2 的整数次幂的话,没有减 1 的结果会变成比他大两倍的数,比如:00100 —> 高位1之后全变1 —> 00111 —> 加1 —> 01000
第二种改变数组长度的情况是扩容。HashMap 每次扩容的大小都是原来的两倍,在扩容时控制了数组大小一定是 2 的整数次幂,相关源码如下:
final Node<K,V>[] resize() {......else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&oldCap >= DEFAULT_INITIAL_CAPACITY)newThr = oldThr << 1; // double threshold}
2. 哈希冲突解决方案
再优秀的 hash 算法永远无法避免出现 hash 冲突。hash 冲突指的是两个不同的 key 经过 hash 计算之后得到的数组下标是相同的。解决 hash 冲突的方式很多,如开放地址法、再哈希法、链地址法等。HashMap 采用的是链地址法,在 JDK 8 之后还增加了红黑树的优化,红黑树查找操作的时间复杂度为 O(logN),但红黑树只有在数据量较大时才能发挥它的优势。
关于红黑树的转化,HashMap做了以下限制:
- 当链表的长度 >=8 且数组长度 >=64 时,会把链表转化成红黑树
- 当链表长度 >=8 但数组长度 <64 时,会优先进行扩容,而不是转化成红黑树
- 当红黑树节点数 <= 6 时会回退到链表结构
那为什么需要数组长度到 64 才会转化红黑树呢?
当数组长度较短时,假如链表长度已经达到了 8,此时如果转化成红黑树,因为当前数组长度较短,很可能后续又会进行扩容操作,而之后的扩容会再一次把红黑树拆分平均到新的数组中,这样非但没有带来性能的好处,反而会降低性能。所以当数组长度低于 64 时,优先进行扩容。
为什么要大于等于 8 转化为红黑树,而不是 7 或 9?
树节点比普通节点更大,在链表较短时红黑树并未能明显体现性能优势,反而会浪费空间,在链表较短时采用链表而不是红黑树。在理论数学计算中,链表的长度到达 8 的概率是百万分之一,因此把 7 作为分水岭,大于 7 则转化为红黑树。红黑树的出现是为了在某些极端的情况下,抗住大量的 hash 冲突,正常情况下使用链表是更加合适的。
常用方法
public V get(Object key)public boolean containsKey(Object key)public V put(K key, V value)public void putAll(Map<? extends K, ? extends V> m)public V remove(Object key)public boolean containsValue(Object value)public Set<K> keySet()public Collection<V> values()public Set<Map.Entry<K,V>> entrySet()// 返回指定键所映射到的值,如果key不存在则返回defaultValuepublic V getOrDefault(Object key, V defaultValue)// 如果key不存在或者key对应的值为null则添加键值对,否则不处理public V putIfAbsent(K key, V value)// 仅当当前key映射到指定值时,才删除指定键的条目public boolean remove(Object key, Object value)// 仅当当前映射到指定值时,才替换指定键的条目public boolean replace(K key, V oldValue, V newValue)// 如果key有映射值时,则进行替换public V replace(K key, V value)// 如果key不存在或者key对应的值为null,则尝试使用给定的映射函数计算其值public V computeIfAbsent(K key, Function<? super K, ? extends V> mappingFunction)// 如果key存在且对应值非空,则尝试在给定键及其当前映射值的情况下计算新映射public V computeIfPresent(K key, BiFunction<? super K, ? super V, ? extends V> remappingFunction)// 尝试为指定键及其当前映射值(如果没有当前映射,则为null)计算映射public V compute(K key, BiFunction<? super K, ? super V, ? extends V> remappingFunction)// 合并指定key的value值public V merge(K key, V value, BiFunction<? super V, ? super V, ? extends V> remappingFunction)public void forEach(BiConsumer<? super K, ? super V> action)// 用该function的结果替换map中的每个key对应的值public void replaceAll(BiFunction<? super K, ? super V, ? extends V> function)
1. put
添加一个元素只需要传入一个键和一个值即可,putVal() 方法是关键。
final V putVal(int hash, K key, V value, boolean onlyIfAbsent, boolean evict) {// tab是HashMap内部数组,p是该下标对应的节点Node<K,V>[] tab;Node<K,V> p;// n是数组的长度,i是要插入的下标int n, i;// 如果table数组还未被初始化,则调用resize方法进行初始化扩容if ((tab = table) == null || (n = tab.length) == 0)n = (tab = resize()).length;// 根据键的hash值找到该键对应到数组中存储的索引位置,如果为null,则说明此索引位置没有被占用,可以直接插入if ((p = tab[i = (n - 1) & hash]) == null)tab[i] = newNode(hash, key, value, null);// 不为null,说明此处已经被占用,只需要构建一个新节点插入到这个链表的尾部即可else {Node<K,V> e; K k;// 如果当前结点和将要插入的结点的hash值和key值都相同,说明这是一次修改操作if (p.hash == hash && ((k = p.key) == key || (key != null && key.equals(k))))e = p;// 如果这个头结点是红黑树结点的话,则以红黑树的插入形式进行插入else if (p instanceof TreeNode)e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);// 遍历此链表,构建一个新的节点插入到该链表的尾部else {for (int binCount = 0; ; ++binCount) {if ((e = p.next) == null) {p.next = newNode(hash, key, value, null);// 如果插入新节点后链表长度大于等于8了,则将链表裂变成红黑树// 注意,treeifyBin方法中会进行数组长度判断,// 若小于64,则优先进行数组扩容而不是转化为树if (binCount >= TREEIFY_THRESHOLD - 1)treeifyBin(tab, hash);break;}// 遍历过程中,如果发现与某个结点的hash值和key值都相等,这依然是一次修改操作if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k))))break;p = e;}}// 如果e不为null,说明当前的put操作是一次修改操作并且e指向的就是需要被修改的结点if (e != null) {V oldValue = e.value;if (!onlyIfAbsent || oldValue == null)e.value = value;afterNodeAccess(e);return oldValue;}}// 如果不是更新旧值,说明HashMap中键值对数量发生变化,modCount+1表示结构改变++modCount;// 如果添加Node节点后,判断数组容量是否达到阈值,是则进行扩容if (++size > threshold)resize();afterNodeInsertion(evict);return null;}
下面通过画一张图总体再加深一下整个流程的印象: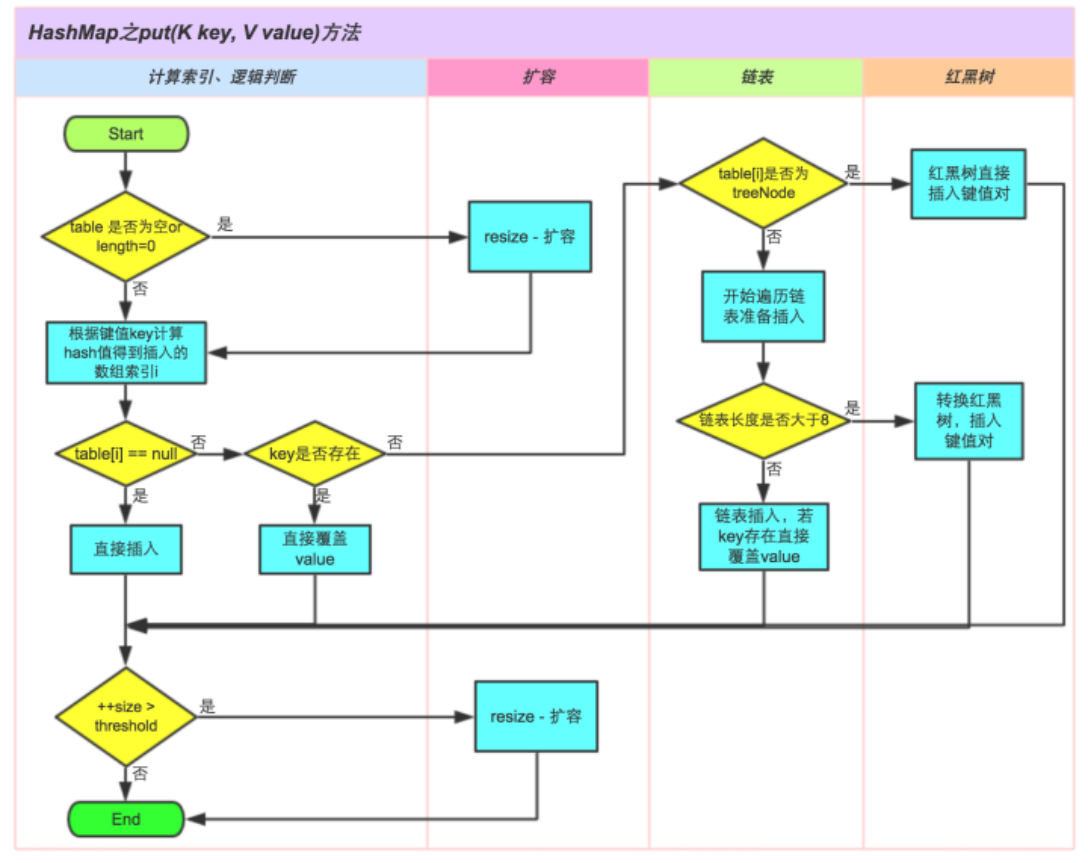
当 bin 的数量大于 TREEIFY_THRESHOLD 时:
- 如果容量小于 MIN_TREEIFY_CAPACITY,只会进行简单的扩容。
- 如果容量大于 MIN_TREEIFY_CAPACITY,则会进行树化改造。
2. get
- 首先将 key 进行 hash 之后定位到对应的哈希桶。
- 如果桶为空直接返回 null,否则判断桶的链表头节点的 key 是否为要查询的 key,是就直接返回 value。
- 如果第一个不匹配,则判断它的结构是红黑树还是链表。如果是红黑树就按照树的查找方式返回值;否则按照链表的方式遍历查找返回值。
final Node<K,V> getNode(int hash, Object key) {Node<K,V>[] tab;Node<K,V> first, e;int n;K k;if ((tab = table) != null && (n = tab.length) > 0 && (first = tab[(n - 1) & hash]) != null) {// 检查头结点if (first.hash == hash && ((k = first.key) == key || (key != null && key.equals(k))))return first;if ((e = first.next) != null) {// 按红黑树的方式进行查找if (first instanceof TreeNode)return ((TreeNode<K,V>)first).getTreeNode(hash, key);// 遍历链表的方式进行查找do {if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k))))return e;} while ((e = e.next) != null);}}return null;}
3. remove
删除操作就是一个【查找+删除】的过程,相对于添加操作其实容易一些。final Node<K,V> removeNode(int hash, Object key, Object value,boolean matchValue, boolean movable) {Node<K,V>[] tab; Node<K,V> p; int n, index;// table数组不为空,并且索引处有值,执行查找操作if ((tab = table) != null && (n = tab.length) > 0 && (p = tab[index = (n - 1) & hash]) != null) {Node<K,V> node = null, e; K k; V v;// 如果跟头节点相等,则将待删除node指针指向头节点if (p.hash == hash && ((k = p.key) == key || (key != null && key.equals(k))))node = p;else if ((e = p.next) != null) {// 如果是红黑树,通过红黑树的操作方法获得nodeif (p instanceof TreeNode)node = ((TreeNode<K,V>)p).getTreeNode(hash, key);else {// 否则遍历链表查找待删除的nodedo {if (e.hash == hash && ((k = e.key) == key || (key != null && key.equals(k)))) {node = e;break;}p = e;} while ((e = e.next) != null);}}// 如果node不为空,执行删除操作if (node != null && (!matchValue || (v = node.value) == value || (value != null && value.equals(v)))) {// 如果是红黑树,则使用红黑树的方法进行删除if (node instanceof TreeNode)((TreeNode<K,V>)node).removeTreeNode(this, tab, movable);// 如果是头节点,则直接将下一个节点设置为头节点else if (node == p)tab[index] = node.next;else// 否则,将头节点的下一个节点设置为待删除的下一个节点p.next = node.next;++modCount;--size;afterNodeRemoval(node);return node;}}return null;}
扩容方案
当 HashMap 中的数据越来越多,那么发生 hash 冲突的概率也就会越来越高,因此通过数组扩容可以利用空间换时间的策略,将查找效率维持在常数时间复杂度。那什么时候会进行扩容呢?
实际上,HashMap 的扩容由一个关键参数控制:装载因子。装载因子 = HashMap 中节点数/数组长度,当达到装载因子比例时就会触发扩容;即装载因子控制了当前数组能够承载的节点数的阈值。如数组长度是 16,装载因子是 0.75,那么可容纳的节点数是 12。
装载因子的数值大小需要仔细权衡,装载因子越大,数组利用率越高,同时发生哈希冲突的概率也就越高;装载因子越小,数组利用率降低,但发生哈希冲突的概率也降低了。在理论计算中 0.75 是一个比较合适的数值,当大于 0.75 时哈希冲突概率呈指数级别上升,而小于 0.75 冲突减少并不明显。因此 HashMap 中装载因子的默认值是 0.75,在没有特殊要求的情况下不建议修改这个值。
那么在到达阈值后 HashMap 是如何进行扩容的呢?
首先 HashMap 会把数组长度扩展为原来的两倍,再把旧数组的数据迁移到新的数组,而 HashMap 针对迁移做了优化:使用 HashMap 数组长度是 2 的整数次幂的特点,以一种更高效的方式完成数据迁移。
JDK 7 之前的数据迁移比较简单,就是遍历所有的节点,把所有的节点依次通过 hash 函数重新计算新下标再插入到新数组的链表中。这样会有两个缺点:一是每个节点都需要进行一次求余计算;二是插入到新的数组时候采用的是头插入法,在多线程环境下会形成链表环。因此在 JDK 8 之后进行了优化,原因在于 HashMap 控制了数组的长度始终是 2 的整数次幂,每次扩展数组都是原来的 2 倍,带来的好处是 key 在新的数组的 hash 结果只有两种:在原来的位置或者在原来位置+原数组长度。具体为什么可以看下图: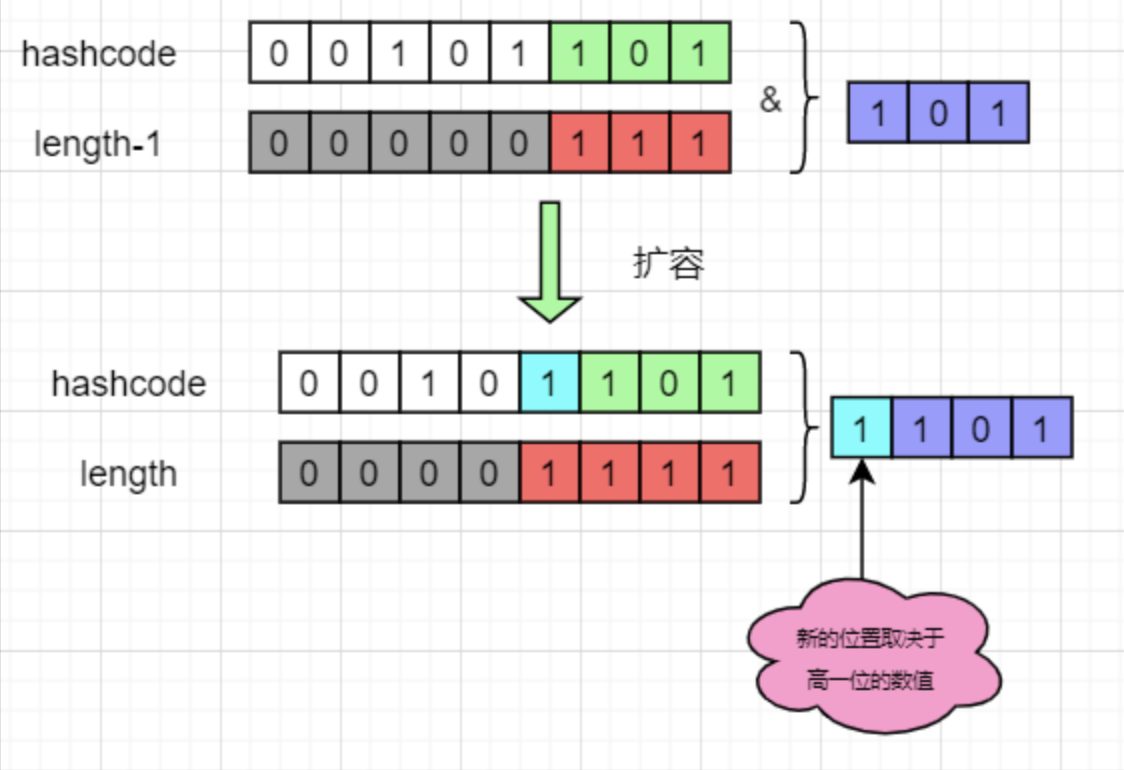
从图中可以看到,在新数组中的 hash 结果,仅仅取决于高一位的数值。如果高一位是 0,那么计算结果就是在原位置,而如果是 1,则加上原数组的长度即可。这样只需要判断一个节点的高一位是 1 或 0 就可以得到他在新数组的位置,而不需要重复计算 hash 值。HashMap 把每个链表拆分成两个链表,对应原位置或原位置+原数组长度,再分别插入到新的数组中,保留原来的节点顺序,具体如下图所示: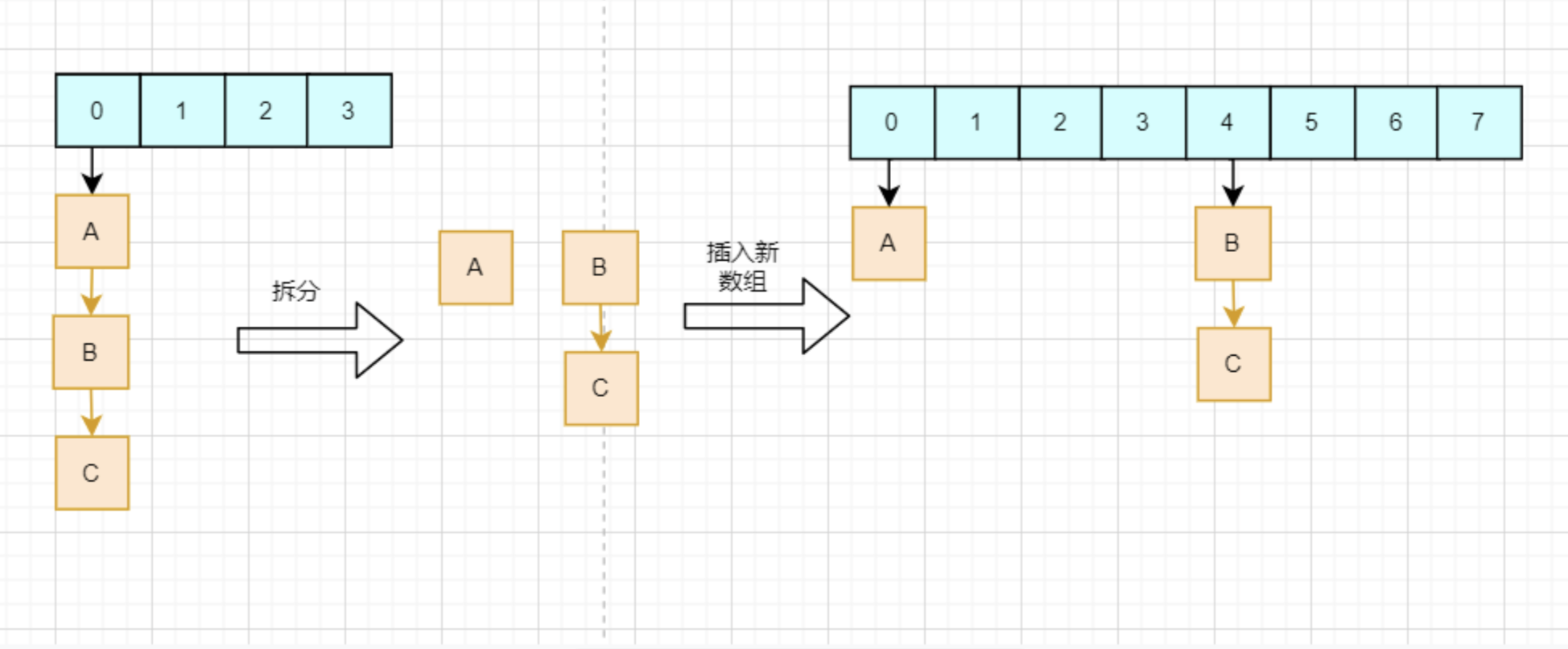
1. resize
数组是无法自动扩容的,因此 resize() 方法使用一个新的数组代替已有的容量小的数组。扩容操作会重新进行内存的分配,并且会遍历 hash 表中的所有元素,是非常耗时的。
final Node<K,V>[] resize() {// 变量分别是原数组、原数组大小、原阈值;新数组大小、新阈值Node<K,V>[] oldTab = table;int oldCap = (oldTab == null) ? 0 : oldTab.length;int oldThr = threshold;int newCap, newThr = 0;// 如果原数组长度大于0,说明不是初始化阶段的扩容,此时需要给旧数组扩容if (oldCap > 0) {// 如果原有数组的长度已经达到了容量限定的最大值,则不再扩容if (oldCap >= MAXIMUM_CAPACITY) {threshold = Integer.MAX_VALUE;return oldTab;}// 如果还未达到最大值,则将数组容量扩大两倍,阈值也扩大两倍else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY && oldCap >= DEFAULT_INITIAL_CAPACITY)newThr = oldThr << 1; // double threshold}// 原数组长度为0,但最大限度不是0,则把数组长度设置为阈值// 对应的情况就是新建HashMap的时候指定了数组长度else if (oldThr > 0)newCap = oldThr;// 按默认值进行table数组和负载因子的初始化else {// 第一次初始化,默认初始容量为16、负载因子为0.75// 对应使用默认构造器新建HashMap对象newCap = DEFAULT_INITIAL_CAPACITY;newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);}if (newThr == 0) {float ft = (float)newCap * loadFactor;newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?(int)ft : Integer.MAX_VALUE);}threshold = newThr;@SuppressWarnings({"rawtypes","unchecked"})// 根据新的容量初始化一个新的node数组Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];table = newTab;// 如果旧数组不为null,表示这次的resize是一次扩容行为,而非初始化if (oldTab != null) {// 将旧数组中的每个节点位置相对静止地拷贝到新数组中for (int j = 0; j < oldCap; ++j) {Node<K,V> e;// 获取头结点if ((e = oldTab[j]) != null) {oldTab[j] = null;// 如果他没有后继节点,则说明链表或红黑树只有一个头结点,转移至新表if (e.next == null)newTab[e.hash & (newCap - 1)] = e;// 如果e是红黑树结点,红黑树分裂,转移至新表else if (e instanceof TreeNode)((TreeNode<K,V>)e).split(this, newTab, j, oldCap);// 这部分是将链表中的各个节点原序地转移至新表中// 新的位置只有两种可能:原位置,原位置+老数组长度// 把原链表拆成两个链表,然后再分别插入到新数组的两个位置上,不用多次调用put方法else {......}}}}// 返回新数组return newTab;}
由代码可知,每次扩容都会扩容一倍的数量,所以元素的位置要么在原位置,要么在原位置移动 oldCap 的位置上。因此我们在扩容 HashMap 的时候,不需要重新计算 hash 值(JDK 1.8 以前要重新计算 hash 值),只需要看原来的 hash 值高位新增的那个 bit 是 1 还是 0,是 0 的话索引不变,是 1 的话索引变成“原索引+oldCap”, 因此原链表将直接拆分为高低链表。
这样既省去了重新计算 hash 值的时间,而且由于新增的 bit 是 0 还是 1 可以被认为是随机的,因此 resize 的过程均匀的把之前冲突的节点分散到新的 bucket 了。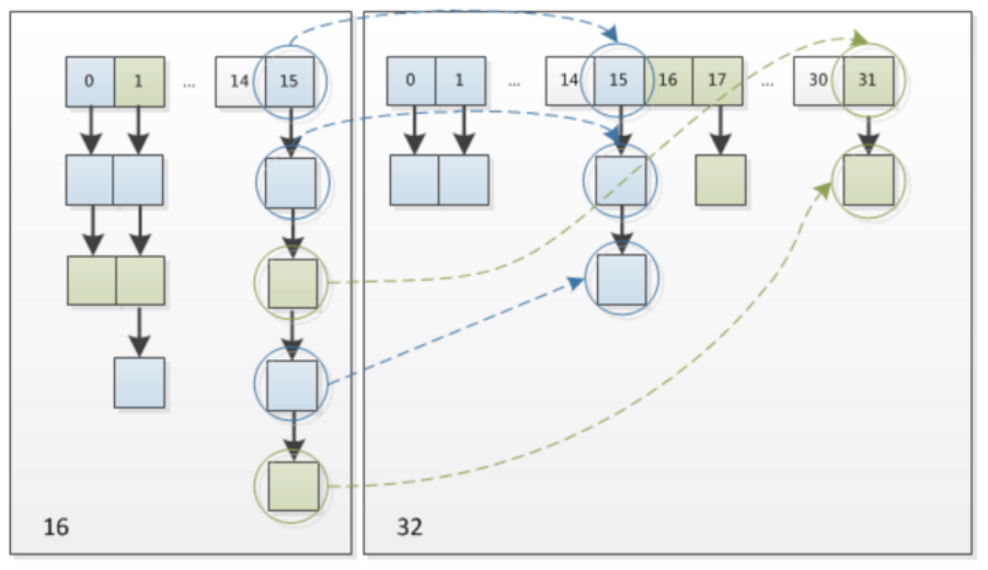
2. 扩容产生的问题
在 JDK 7 的时候,HashMap 的 resize() 方法在扩容过程中移动元素时,会将元素放在链表的头部,而不是放在尾部,这样做是为了避免尾部遍历,因此链表中存储的元素次序会反过来。但这样的方式在多线程调用的情况下可能会存在条件竞争,如果条件竞争发生了可能会出现环形列表,那么当我们调用 get(key) 操作时就可能会发生死循环了。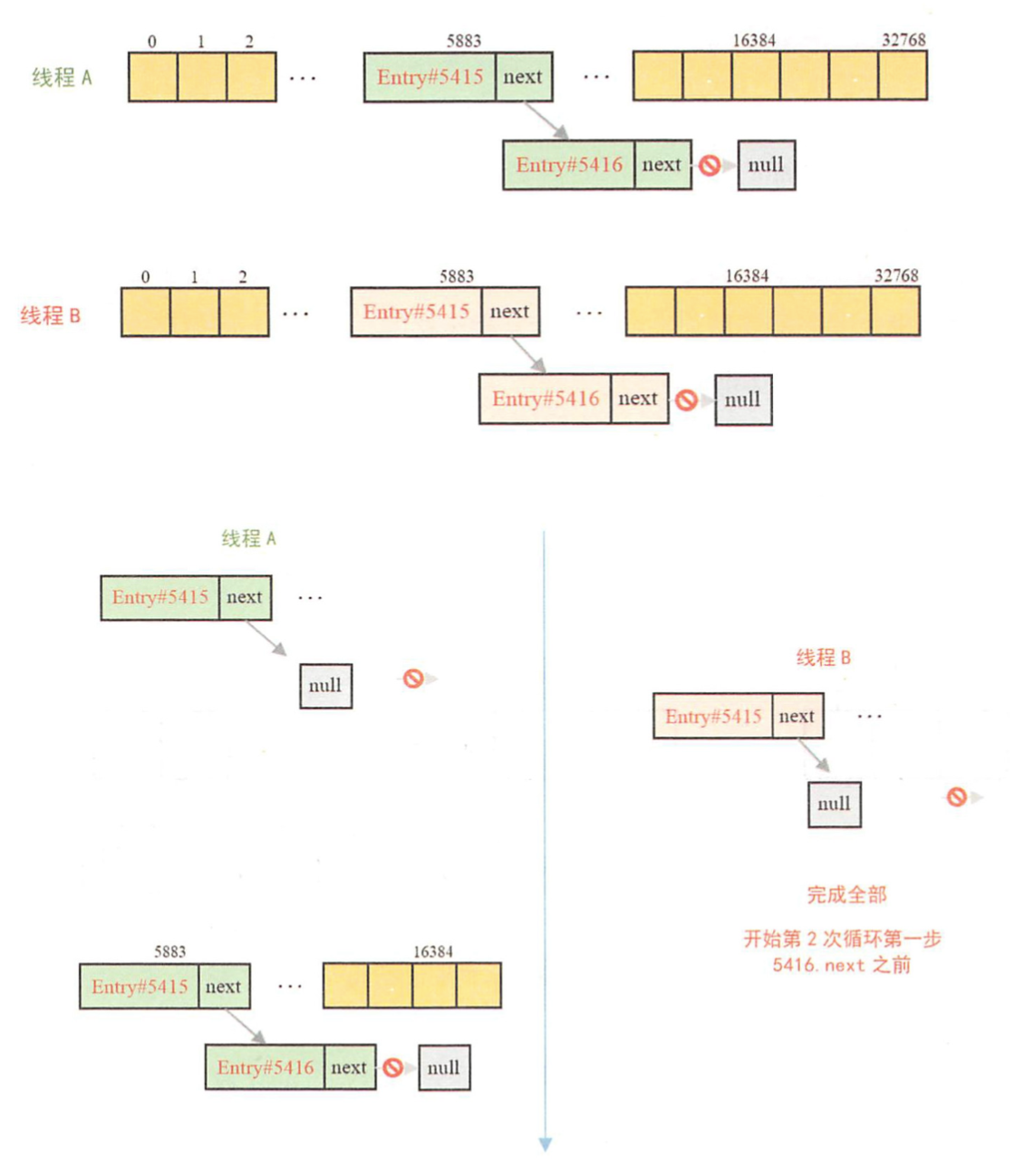
参考链接:https://coolshell.cn/articles/9606.html
参考链接:https://mailinator.blogspot.com/2009/06/beautiful-race-condition.html
而在 JDK 8 中,HashMap 采用了尾插法的方式,在扩容时会保持链表元素原本的顺序,并且不会出现在并发情况下链表成环的问题了。

若有收获,就点个赞吧
0 人点赞
