GD(Gradient Descent)

两个缺点:**
- 训练速度慢:每走一步都要要计算调整下一步的方向,下山的速度变慢。需要花费很长时间才能得到收敛解。
- 容易陷入局部最优解:由于是在有限视距内寻找下山的反向。当陷入平坦的洼地,会误以为到达了山地的最低点,从而不会继续往下走。
BGD(Batch Gradient Descent)
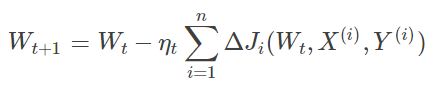
模型参数的调整更新与全部输入样本的代价函数的和(即批量/全局误差)有关。在下山之前掌握了附近的地势情况,选择总体平均梯度最小的方向下山。
SGD(Stochastic Gradient Descent)
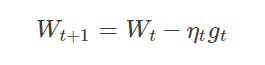
优点:
- 虽然SGD需要走很多步的样子,但是对梯度的要求很低(计算梯度快)。而对于引入噪声,大量的理论和实践工作证明,只要噪声不是特别大,SGD都能很好地收敛。
缺点:
- SGD在随机选择梯度的同时会引入噪声,使得权值更新的方向不一定正确。
- SGD也没能单独克服局部最优解的问题。
Momentum(动量优化法)
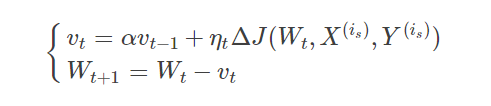
理解策略为:** 由于当前权值的改变会受到上一次权值改变的影响,类似于小球向下滚动的时候带上了惯性。这样可以加快小球向下滚动的速度。
动量主要解决SGD的两个问题:**
- 是随机梯度的方法(引入的噪声);
- 是Hessian矩阵病态问题(可以理解为SGD在收敛过程中和正确梯度相比来回摆动比较大的问题)。
RMSProp(自适应学习率)
思想:考虑了历史梯度平均值。具有代价函数最大梯度的参数相应地有个小的的学习率,而具有小梯度的参数有个较大的学习率。
RMSProp算法修改了AdaGrad的梯度积累为指数加权的移动平均,使得其在非凸设定下效果更好。
算法描述:RMSProp算法的一般策略可以表示为: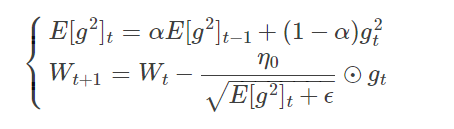
由于取了个加权平均,避免了学习率越来越低的的问题,而且能自适应地调节学习率。
Adam
Adaptive Moment Estimation
Adam 可以认为是 RMSprop 和 Momentum 的结合: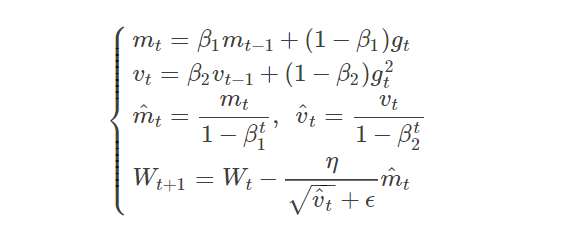
其中, 和
和 分别为一阶动量项和二阶动量项。
分别为一阶动量项和二阶动量项。 和
和 为动力值大小通常分别取0.9和0.999;
为动力值大小通常分别取0.9和0.999; 和
和 分别为各自的修正值。
分别为各自的修正值。 表示
表示 时刻即第迭代模型的参数,
时刻即第迭代模型的参数, 表示次迭代代价函数关于
表示次迭代代价函数关于 的梯度大小;
的梯度大小; 是一个取值很小的数(一般为1e-8)为了避免分母为0.
是一个取值很小的数(一般为1e-8)为了避免分母为0.

若有收获,就点个赞吧
0 人点赞
