1) Chassis blocks
1.1)
This block controls the chassis to go different directions at different speeds.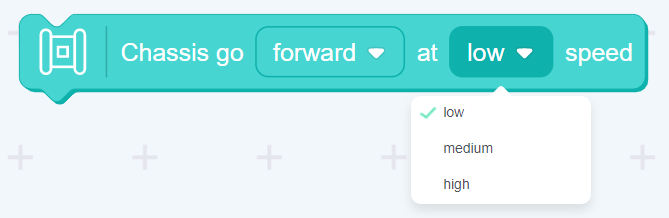
(low speed has about 25% power; medium speed has about 50% power and high speed has full power.)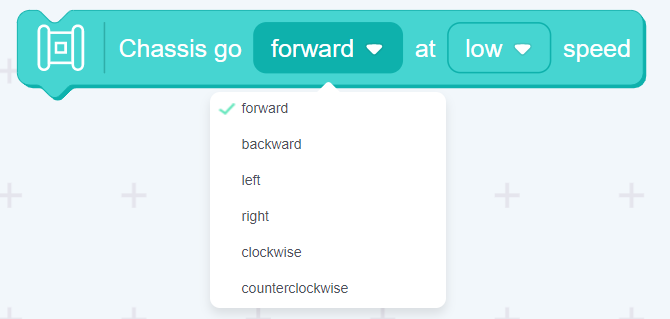
Example 1: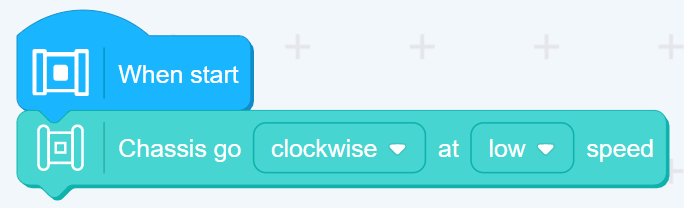
The chassis then will go clockwise at a low speed.
1.2)
This block controls the car to stop.
Example 2:
The car will stop after moving forward for 2 seconds.
1.3)
The value to input into the two blanks is n, and -100≤n≤100. When n is a positive number, motors will rotate counterclockwise; when n is a negtive number, motors will rotate clockwise.
If the number input is beyond the number range to input into the blanks, then it will be automatically turned to be a number within the range.
Example 3: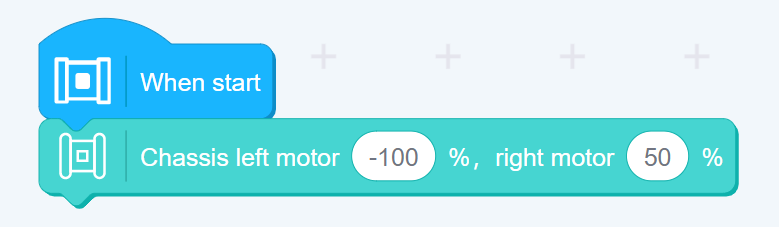
According to the programming, the chassis left motor rotates clockwise while the right motor rotates counterclockwise.
2) Servo blocks
2.1)
The number can be changed to control the degree the servo moves to. The degree that the servo can move to is n and 0≤n≤180.
If the number input is beyond the number range to input into the blanks, then it will be automatically turned to be a number within the range.
Example 4: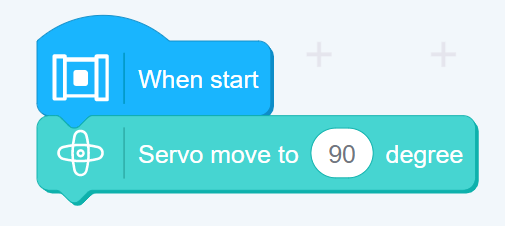
When start, the servo will move to 90 degree.
3) DC motor programming blocks
3.1)
This block controls the motor’s speed power, and the power is -100≤n≤100. When n is a positive number, motors will rotate counterclockwise; when n is a negtive number, motors will rotate clockwise.
If the number input is beyond the number range to input into the blanks, then it will automatically turn to be a number within the range.
Example 5: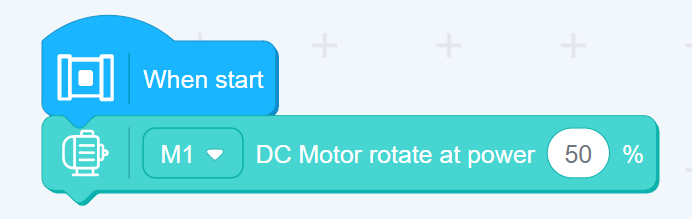
Then the servo will rotate counterclockwise at power 50%.
3.2)
This block will control the motor to stop rotating.
Example 6: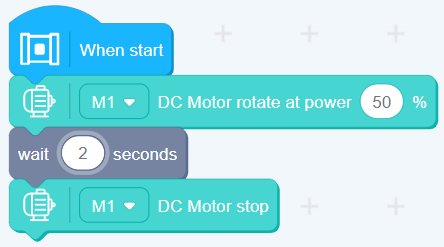
The motor will stop after rotating counterclockwise for 2 seconds.

若有收获,就点个赞吧
0 人点赞
