条件随机场分类
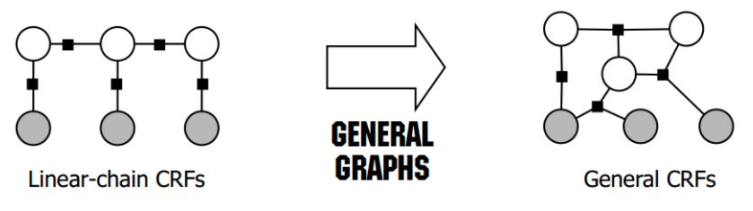
1.1用于序列标注—线性链条件随机场
(命名实体识别-维比特算法)
1.2用于图像—稀疏条件随机场与全连接条件随机场
下面内容参考-图像语义分割(4)- DeepLab_v1
关于条件随机场,可以参考文章《如何轻松愉快地理解条件随机场(CRF)?》。简单来说就是,定义一组特征函数来描述事件之间的概率,所谓的条件就是,所有这些事件的当前的一个组合
文章《CRF as RNN语义分割》 另一个总里对全连接条件随机场有很好的总结,可惜没写完。以下内容参考此篇文章
如图3所示,定义xi为像素点i的分类标签,其取值就是我们要分类的语义标签;yi为每个随机变量xi的观测值,即该像素的颜色(亮度)值。条件随机场的语义分割的目标就是:通过观测变量yi,推理出变量xi的值
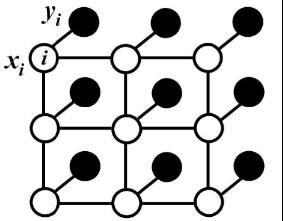
图3. 条件随机场图模型
如图3所示,为图模型G=(V,E),其中V={x1,x2,…,xn}为顶点;对于边,有稀疏条件随机场和全连接条件随机场之分:
1)稀疏条件随机场:每对相邻(4邻域、8邻域)的像素点可以构成一条边
2)全连接条件随机场desen CRF:每个像素点与所有其他像素点相连,可以想象,这样的计算量是非常大的。(deeplab)
文献【2】给出了快速推理算法

若有收获,就点个赞吧
0 人点赞
