SVD的应用
首先先回顾上一章节讲的SVD分解,就是在mn的矩阵A的左右两边分别乘以 和
和 ,得到一个对称矩阵。最后通过证明矩阵A可以分解为这种形式:
,得到一个对称矩阵。最后通过证明矩阵A可以分解为这种形式: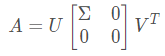
分析一下该式中各项的shape如下:
A:mn U:mm  :mn
:mn  :nn
:nn
如果矩阵A的秩R(A)=r,则 是rr对角阵,其中对角线上的元素就是
是rr对角阵,其中对角线上的元素就是 的不为0的特征值的平方根。把U写成列向量的形式为:
的不为0的特征值的平方根。把U写成列向量的形式为: ,其中每个
,其中每个 都是m维列向量,同理,V也可以写为
都是m维列向量,同理,V也可以写为 ,转置后变为
,转置后变为 ,因此上式矩阵A可以展开为:
,因此上式矩阵A可以展开为: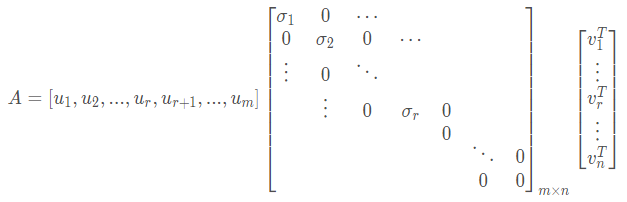
展开过程中我们观察到,因为中间矩阵的后n-r项都为0,所以矩阵 的m-r项和的n-r项在矩阵计算过程中都相乘为0,所以上式就变为:
的m-r项和的n-r项在矩阵计算过程中都相乘为0,所以上式就变为:
分析一下该式中个各项的shape::m1  :1n 所以
:1n 所以 的shape为m*n,就和A的维度刚好对上。
的shape为m*n,就和A的维度刚好对上。
注意这里 之间是有大小关系的:
之间是有大小关系的: ,接下来我们看看这个性质在后面有什么应用。
,接下来我们看看这个性质在后面有什么应用。
图像压缩
实现方法
在图像处理中,图像信息是作为一个矩阵输入的。假设输入矩阵A是 的,而每个点是float类型(即用4字节存储),那么在存储这张图像时就需要占用
的,而每个点是float类型(即用4字节存储),那么在存储这张图像时就需要占用 个字节的空间大小。
个字节的空间大小。
再看上式我们推导出的右边,其中虽然也是 的,但是是m1的只有m个数,是1n的只有n个数,所以存储只要
的,但是是m1的只有m个数,是1n的只有n个数,所以存储只要 个字节的空间大小。
个字节的空间大小。
而上面我们已经知道,所以 。并且一般前几项中的值都较大,而后面的都接近于0。这意味着前面的项已经包含了大部分的图片信息,后面的项相对不重要。
。并且一般前几项中的值都较大,而后面的都接近于0。这意味着前面的项已经包含了大部分的图片信息,后面的项相对不重要。
因此A可以用前k项的 来近似表示,此时图片存储需要的空间为:
来近似表示,此时图片存储需要的空间为: ,其中1是常数占用的空间,可以看到当
,其中1是常数占用的空间,可以看到当 时,
时, ,从而达到了图像压缩的目的。
,从而达到了图像压缩的目的。
损失
因为的模长为1,所以采用上述方法压缩图像造成的损失为: ,也就是k越大,损失越小。举个例子:
,也就是k越大,损失越小。举个例子:
可以看到
传统网络图片传输与现代传输的原理
传统
传统电脑加载图片时,都是从第一行的像素点开始传输,然后我们会看到图片是一行一行的加载出现,效果如下:
现代
而现在我们打开图片时会发现照片是从不清晰到清晰,可能就是利用SVD分解,一开始先传输前5个,然后逐渐增加k,即传送更多的,所以就会产生从不清晰到清晰的过程。
矩阵乘法加速
假设矩阵A的shape是200100的,A用SVD分解变成:,取前25项近似表示A: ,把
,把 记为M,则
记为M,则
假设矩阵A跟一个1001的列向量x做乘法,Ax的乘法计算次数为 次;
次;
如果计算MNx,首先Nx的乘法计算次数为 次,计算后shape为251,而M和Nx的乘法计算次数为
次,计算后shape为251,而M和Nx的乘法计算次数为 次,所以MNx的乘法计算次数为*7500次。
次,所以MNx的乘法计算次数为*7500次。
并且由上面推导我们可以知道,计算MNx过程中空间存储也较低。
多元线性回归
最小二乘推导
现在有N个样本 ,每个样本
,每个样本 对应
对应 ,所以有:
,所以有:

… 注意这里
注意这里 代表向量
代表向量 (n1)的第1个分量,一共有n个分量
(n1)的第1个分量,一共有n个分量
上式可以化作: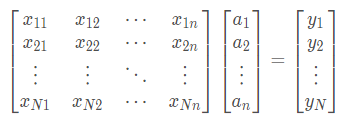
即我们要找到一组参数 使得上式成立。上式还可以写作:
使得上式成立。上式还可以写作:
也就是要解这个线性方程得到系数 。
。
当x的空间维度和样本个数一样的时候,也就是N=n(X是方阵),*且X可逆时,上式两边同时乘以X的逆矩阵:
但是这个是理想情况,而一般情况下 ,此时不可能成立,这个时候退而求其次,想办法使其左右两边尽可能的接近,一种办法就是让二者模长相减最小,即
,此时不可能成立,这个时候退而求其次,想办法使其左右两边尽可能的接近,一种办法就是让二者模长相减最小,即 ,要求最小值就是令这个二范数求导为0求解a,注意这里a才是变量,其它是参数。
,要求最小值就是令这个二范数求导为0求解a,注意这里a才是变量,其它是参数。
也就是求解 ,而这里
,而这里 不一定可逆,因为它是半正定的,下面用试探矩阵U证明一下:
不一定可逆,因为它是半正定的,下面用试探矩阵U证明一下:
如果大于0就是正定矩阵。所以不一定可逆,因此下面分两种情况讨论:
当N>n,即样本数>参数个数
如N=5,n=3, 一般是可逆的,因为
一般是可逆的,因为 ,而X的秩很可能是3(因为可以把X看作5个三维空间上的点,只要找到3个点不在同一直线上,X的秩就为3。也就是从5行向量中找到3个线性无关的向量)。
,而X的秩很可能是3(因为可以把X看作5个三维空间上的点,只要找到3个点不在同一直线上,X的秩就为3。也就是从5行向量中找到3个线性无关的向量)。
所以当可逆时
其中 也叫做X的伪逆,伪逆矩阵不一定存在。
也叫做X的伪逆,伪逆矩阵不一定存在。
当N<n,即样本数<参数个数
如N=3,n=5,此时 是不可逆的,因为
是不可逆的,因为 。
。
则此时要给最小二乘的J加一个正则项,即最小二乘+最小范数。也叫做岭回归。
此时
对J求导就变为
即转换为求解
其中 必定可逆
必定可逆
(因为可以用一个不为0的试探向量a证明它是正定矩阵:
因为 ,
, ,所以为正定矩阵,其特征值
,所以为正定矩阵,其特征值 ,而
,而 ,所以其为可逆矩阵。)
,所以其为可逆矩阵。)
所以可以解出a:
此时a就是最小二乘的基础上,还增加了对系数矩阵的最小范数的约束,希望a的范数尽可能小。也叫做岭回归。
**
总结
上述推导可见分为2种情况讨论很麻烦,所以一般不管N是否大于n,直接用岭回归来求解。所以最后的解一般是
一般不用伪逆。

若有收获,就点个赞吧
0 人点赞
