1、MNIST数据集
似乎所有程序员在学习一个新的程序语言时,都想要打印输出一个“hello world”,它代表了你入门了这门语言。那么,MNIST手写数字识别便是入门机器学习和深度学习的“hello world”。跑通MNIST程序便能大致了解机器学习的流程,包括数据的读取、转换(totensor)、归一化、神经网络模型设计、超参数设计、训练、前向传播、后向传播等等。在入门机器学习之前先自己跑通一遍MNIST识别程序具有非凡的意义。
MNIST(Mixed National Institute of Standards and Technologydatabase)是一个手写数字的大型数据库,拥有60,000个示例的训练集和10,000个示例的测试集。更详细的介绍可以查看 Yann LeCun的MNIST数据集官网。
2、代码
本程序来自pytorch官方提供的MNIST示例代码,链接:https://github.com/pytorch/examples/blob/master/mnist/main.py
在经过修改并添加训练结果可视化和特征图可视化等功能,github链接在本文最下方
2.1 导入模块
from __future__ import print_function # 这个是python当中让print都以python3的形式进行print,即把print视为函数import argparseimport osimport numpy as npimport torchimport torch.nn as nnimport torch.nn.functional as Fimport torch.optim as optimfrom torchvision import datasets, transformsfrom torch.optim.lr_scheduler import StepLRfrom pathlib import Pathimport time# import networkfrom model.network.LeNet import LeNetfrom model.network.MyNetV1 import MyNetV1from model.network.MyNetV2 import MyNetV2from model.network.DefaultNet import DefaultNetfrom model.network.LeNet5 import LeNet5from model.network.MyFullConvNet import MyFullConvNetfrom model.network.MyVggNet import MyVggNet
导入训练网络需要的模块,其中值得注意的是:
- argparse模块,该模块允许你在运行.py文件时可以附带参数,如:python train.py —model lenet
- torch基本模块,即pytorch基本的库
- matplotlib模块,用于绘制loss曲线和acc曲线图,也用于显示模型中各层特征图即特征图可视化
2.2 函数参数
通过argparse模块,可以在运行文件时添加运行所需要的参数。这些参数可以用于设置网络模型的超参数,如学习率、batch-size、epochs、训练模型等等。下面贴出代码:
# Training settingsparser = argparse.ArgumentParser(description="Pytorch MNIST Example")parser.add_argument("--batch-size", type=int, default=64, metavar="N",help="input batch size for training (default : 64)")parser.add_argument("--test-batch-size", type=int, default=1000, metavar="N",help="input batch size for testing (default : 1000)")parser.add_argument("--epochs", type=int, default=64, metavar="N",help="number of epochs to train (default : 64)")parser.add_argument("--learning-rate", type=float, default=0.1, metavar="LR",help="number of epochs to train (default : 14)")parser.add_argument("--gamma", type=float, default=0.5, metavar="M",help="Learning rate step gamma (default : 0.5)")parser.add_argument("--no-cuda", action="store_true", default=True,help="disables CUDA training")parser.add_argument("--dry-run", action="store_true", default=False,help="quickly check a single pass")parser.add_argument("--seed", type=int, default=1, metavar="S",help="random seed (default : 1)")parser.add_argument("--log-interval", type=int, default=10, metavar="N",help="how many batches to wait before logging training status")parser.add_argument("--save-model", action = "store_true", default=True,help="For saving the current Model")parser.add_argument("--load_state_dict", type=str, default="no",help="load the trained model weights or not (default: no)")parser.add_argument("--model", type=str, default="LeNet",help="choose the model to train (default: LeNet)")args = parser.parse_args()
值得注意的是:
- batch-size:批训练大小,单次训练用的样本数。通常以
 为大小。如果batch-size过小,就好像你每次数钱只数一张(而不是好几张一起数),训练数据效率就低下,且收敛困难;如果batch-size过大,虽然相对处理速度加快,但是所需要的内容容量增加,可能会出现 CPU/GPU 内存容量不足等情况,所以需要根据图片具体大小、模型复杂度和计算机性能之间权衡batch-size的大小
为大小。如果batch-size过小,就好像你每次数钱只数一张(而不是好几张一起数),训练数据效率就低下,且收敛困难;如果batch-size过大,虽然相对处理速度加快,但是所需要的内容容量增加,可能会出现 CPU/GPU 内存容量不足等情况,所以需要根据图片具体大小、模型复杂度和计算机性能之间权衡batch-size的大小 - epochs:一个epoch表示所有的数据送入网络中完成一次前向传播和后向传播的过程
- leaning-rate:学习率
- load_state_dict:继续模型训练/重新开始训练。假设上次的训练效果不理想,你想在上次的基础上继续训练,就可以添加这个选项,训练前加载之前生成的权重文件
- gamma:调整学习率中所用的参数,调整方法为StepLR
其他参数大概就是字面意思。要注意必须有args = parse.parse_args()这一句,意思是把爬取到的参数信息赋值到变量args上,后续便可以通过args得到参数值,比如args.model, args.learning_rate
2.3 数据加载与transform
以下代码是程序加载数据和对数据进行转化(ToTensor)的代码:
train_kwargs = {"batch_size": args.batch_size}test_kwargs = {"batch_size": args.test_batch_size}if use_cuda:cuda_kwargs = {"num_workers": 1, "pin_memory": True, "shuffle": True}train_kwargs.update(cuda_kwargs)test_kwargs.update(cuda_kwargs)transform = transforms.Compose([transforms.ToTensor(),# normalize(mean, std, inplace=False) mean各通道的均值, std各通道的标准差, inplace是否原地操作# 这里说的均值是数据里的均值# output = (input - mean) / std# 归一化到-1 ~ 1,也不一定,但是属于标准化transforms.Normalize((0.1307, ), (0.3081, ))])dataset1 = datasets.MNIST("./data", train=True, download=True,transform=transform)dataset2 = datasets.MNIST("./data", train=False,transform=transform)train_loader = torch.utils.data.DataLoader(dataset1, **train_kwargs)test_loader = torch.utils.data.DataLoader(dataset2, **test_kwargs)
num_workers是多进程的加载数,pin_memory是是否将数据保存在pin memory区,pin memory中的数据转到CPU会比较快。另外几个值得注意的点是:
- 加载数据集
- train=True即加载训练集,false即加载训练集
- download即是否下载数据集,如果数据集不存在,则代码会自动下载数据集到指定路径中;若存在,则略过
- shuffle是打乱
- 数据转换与归一化
- 数据原本是二进制文件,通过transform将其转换成可训练的tensor张量
- 因为数据集都是一通道的黑白图片,像素值为0-255,为了方便计算,需要将其归一化,这样做可以让收敛更快。其中mean是数据里的均值,std是各通道的标准差
2.4 训练
graph_loss = []graph_acc = []def train(args, model, device, train_loader, optimizer, epoch):# 这里的train和上面的train不是一个trainmodel.train()start_time = time.time()tmp_time = start_timefor batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device)optimizer.zero_grad()output = model(data)loss = F.nll_loss(output, target)loss.backward()optimizer.step()if batch_idx % args.log_interval == 0:print("Train Epoch: {} [{}/{} ({:.0f}%)]\t Loss: {:.6f}\t Cost time: {:.6f}s".format(epoch, batch_idx * len(data), len(train_loader.dataset),100. * batch_idx / len(train_loader), loss.item(), time.time() - tmp_time))tmp_time = time.time()graph_loss.append(loss.item())if args.dry_run:breakend_time = time.time()print("Epoch {} cost {} s".format(epoch, end_time - start_time))
定义全局变量graph_lossand graph_acc分别记录训练过程中的准确率和损失,最后写入.txt文件中,方便后续查看和数据可视化。简单的说一下训练的流程:
- 从dataloader中获取数据集的数据和与之对应的标签,即data,target,并放到device中(CPU/GPU)
- 初始化optimizer的梯度为0
- 数据送入模型处理
- 根据输出和实际标签计算loss值。这里采用的损失函数是nll_loss,也是一种交叉熵损失函数。它和CrossEntropyLoss的区别是,nll_loss没有包含softmax这一步,所以它适合模型结尾带有softmax的网络
- 根据损失值进行后向传播
- 后向传播的工具是优化器,优化器开始后向传播
- 每隔一个log_interval输出当前的训练结果,比如损失值、当前epoch完成百分比和时间
仔细的理解训练过程的每一步,便知道机器学习的原理大概是怎么样的
2.5 测试
测试训练结果在代码在test_model.py里,测试内容是测试集的前1000张图片(这个数字可以在argparse里面修改)。输入
python test_model.py --model lenet
便得到测试结果:
3、训练结果可视化
在训练的过程中,我将训练的结果存放在graph_loss和graph_acc里,并且在训练结束之后,将两个列表中的数据存储到.txt文件当中。现在,便可以从.txt文件中读取训练结果并显示出来。用于画图的工具是matplotlib,而相关的代码文件是draw_graph.py,以下为代码:
import matplotlibimport osimport numpy as npfrom matplotlib import pyplot as pltimport argparseimport sysparser = argparse.ArgumentParser()parser.add_argument("--model", type=str, default="lenet")args = parser.parse_args()#file_loss_path = "E:/WorkSpace/Pytorch/mnist/model/result/{}_loss.txt".format(args.model)file_loss_path = sys.path[0] + "/model/result/{}_loss.txt".format(args.model)lst_loss = list()with open(file_loss_path) as file_object:for line in file_object:if "e" in line:lst_loss.append(eval(line))else:lst_loss.append(float(line[:-2]))file_object.close()#file_acc_path = "E:/WorkSpace/Pytorch/mnist/model/result/{}_acc.txt".format(args.model)file_acc_path = sys.path[0] + "/model/result/{}_acc.txt".format(args.model)lst_acc = list()with open(file_acc_path) as file_object:for line in file_object:if "e" in line:lst_acc.append(eval(line))else:lst_acc.append(float(line[:-2]))file_object.close()print(lst_acc)plt.title("{} loss".format(args.model))plt.plot(lst_loss)plt.xlim(0 - len(lst_loss) / 20, len(lst_loss))plt.ylim(0, 1.5)plt.grid()plt.savefig(file_loss_path[:-3] + "jpg")plt.title("{} acc".format(args.model))plt.plot(lst_acc)plt.xlim(0 - len(lst_acc) / 20, len(lst_acc))plt.ylim(min(lst_acc) - 1, max(max(lst_acc) + 1, 100))plt.savefig(file_acc_path[:-3] + "jpg")
通过matplotlib,读取.txt文件中的数据,将其以图表的形式显示并且保存下来,以下为效果:
64个epcoh的训练准确率: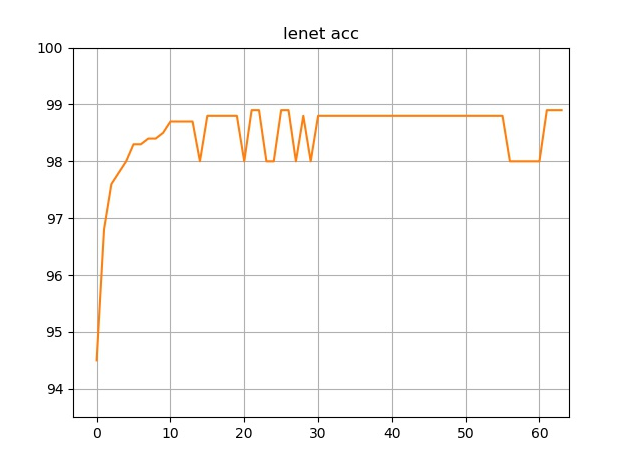
训练过程中的损失: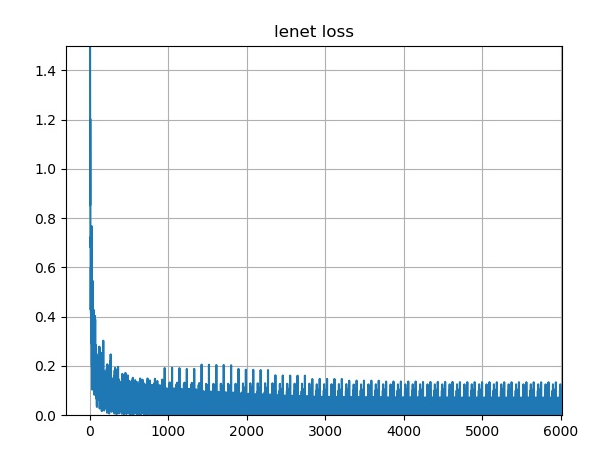
3.1 多模型准确率汇总
在学习本程序的过程中,我也在学习一些经典网络,比如LeNet, AlexNet, VggNet等,所以尝试着自己搭建网络并将经典网络中的优点融入其中,以下为不同网络准确率: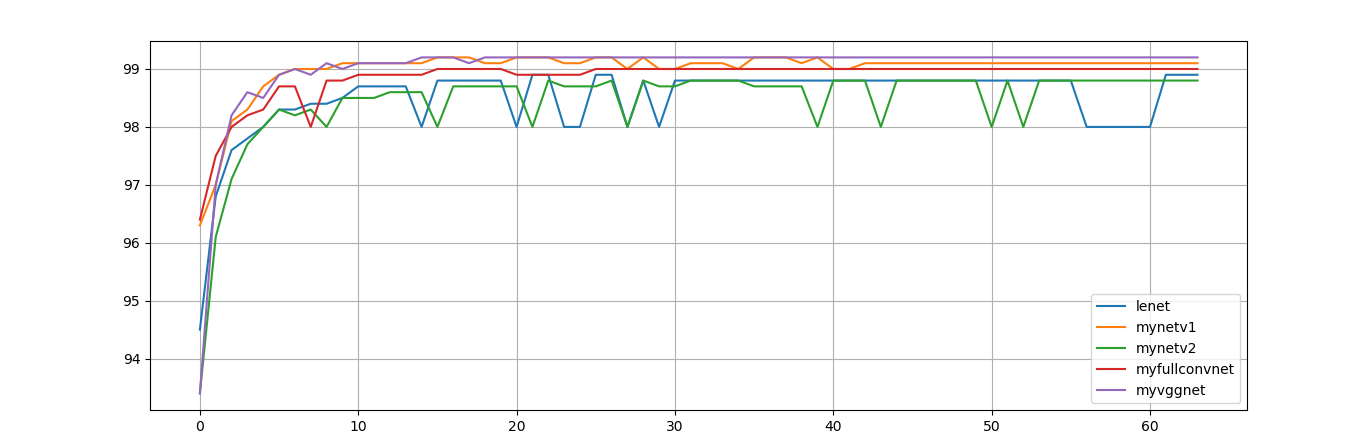
- LeNet,最经典的网络,包含了基本的卷积神经网络结构。可见由于其网络结构过于简单,其准确率有较大的抖动,但是有不错的准确率
- MyFullConvNet,运用了更多的卷积层,并且用卷积层代替第一个全连接层,效果比LeNet要好
- MyNetV1,这也是我自己设计的网络结构,其中的设计思想是:① 尽可能的使用小卷积核,参数量更少; ② 使用stride = 2的卷积核来代替池化层,这样虽然参数量有所增加,但是弥补了池化层会过滤掉过多信息的缺点; ③ 使用dropout技术,使网络降低过拟合。
- MyNetV2,本来是想用卷积层代替更多的其他层,于是用了输出通道数比输出通道数小的卷积层,但结果并不理想,甚至比LeNet准确率还要低
- MyVggNet,参考了VggNet的特性修改的网络,用多个小卷积层的堆叠替代大卷积层,这样做的优势是感受野不变,但是增加了更多非线性的因素(因为每一层卷积后都跟一个relu激活函数)。事实证明,更深的网络的确能带来更好的效果,并且观察训练结果可以发现,更深的网络更加稳定,不易抖动。
4、特征图可视化
光是看代码,是难以理解卷积神经网络是如何识别数字的。所以不如将卷积神经网络中每一层输出的特征图显示出来,便能知道在卷积神经网络这个黑盒子里,到底发生了什么。
实现特征图可视化的基本思想是:卷积神经网络处理的数据类型是tensor(张量),张量是无法用于显示图片的,所以需要将其转换成可以显示为图片的数据类型,比如numpy。再通过matplotlib,将其显示出来。
具体代码请到我的github上查看,在本文的最下方
4.1 原图
下图是测试集中一个手写数字“8”的图片: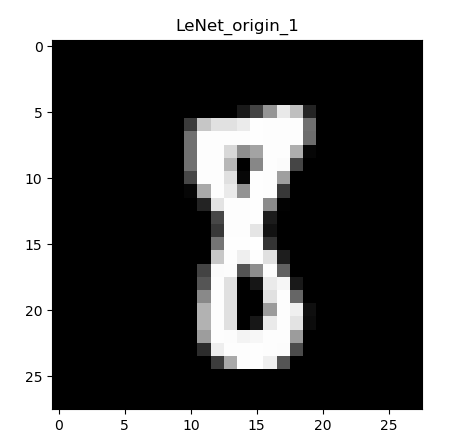
通过观察图片和观察具体tensor的输出可以发现,MNIST数据集存放的是一通道的黑白图片,其中的像素值是0~255,其特征较为简单。
4.2 卷积后的特征图
下图是经过一次卷积之后的特征图: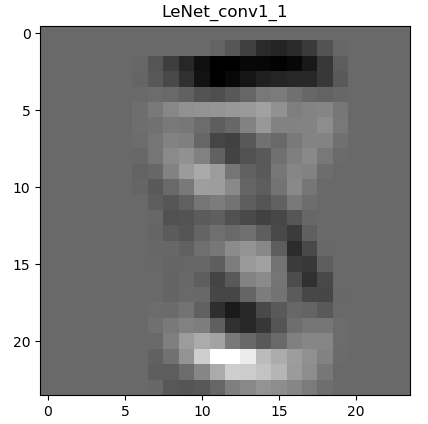
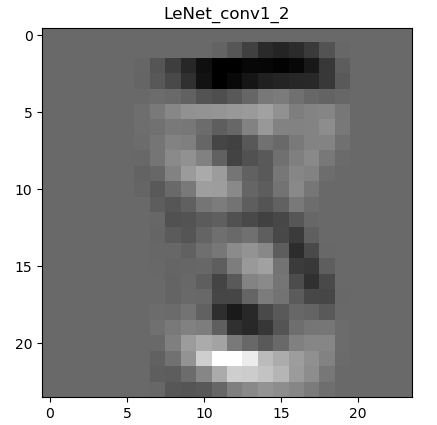
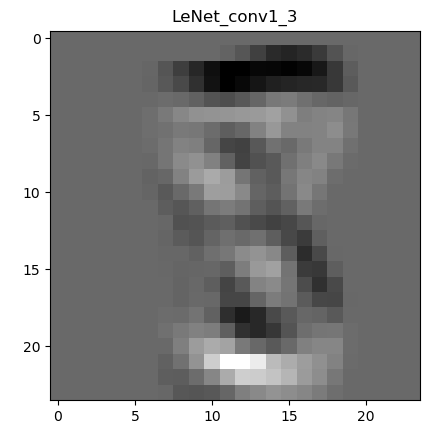
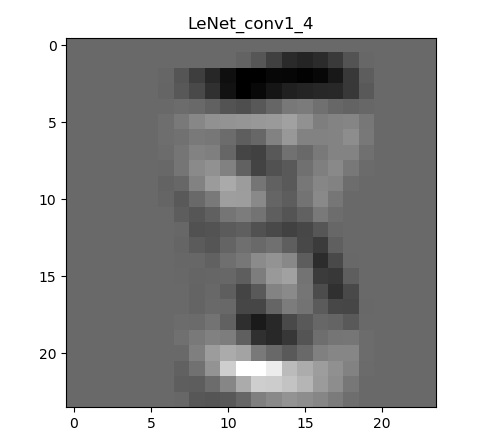
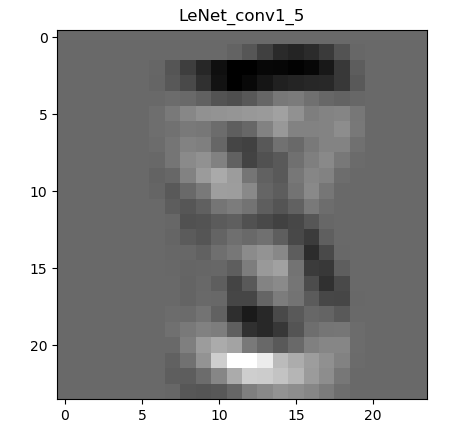
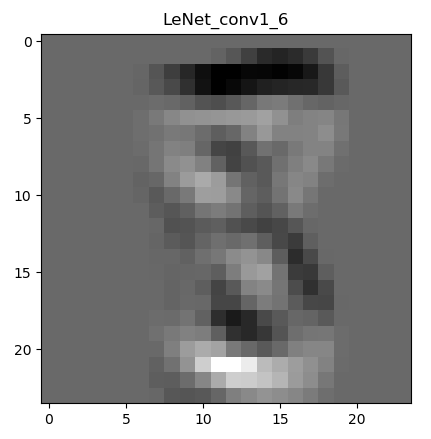
为什么会有6张呢,因为第一层的卷积层输出通道数是6,所以会生成6张不同的特征图。虽然看着感觉六个特征图差别不大,那是因为数据集过于简单,如果是复杂一些的图片,便能看到其不同。图片经过卷积之后,图像像素从28 28变成了26 26。现在用肉眼还能勉强看出来是个数字8。
4.3 激活函数relu后的特征图
下面显示卷积->ReLu激活函数后的图像: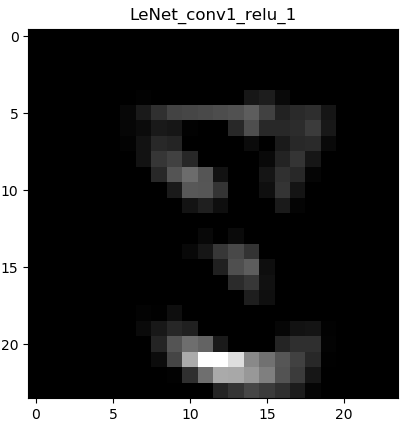
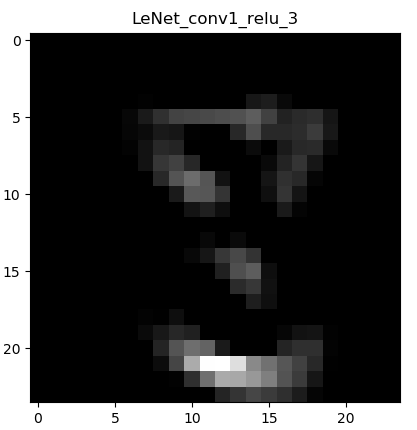
这一层的输出同样是6张,但是由于篇幅就不全部贴出来了。看了图像之后马上就能理解,ReLu激活函数干了什么。通俗的讲:将黑的地方变得更黑,白的地方保持不变。ReLu的表达式:
使小于0的数字等于0,大于0的数字则保持不变。(因为训练过程中,图像数据都是经过归一化处理的,使得像素值的范围为-1~1)。
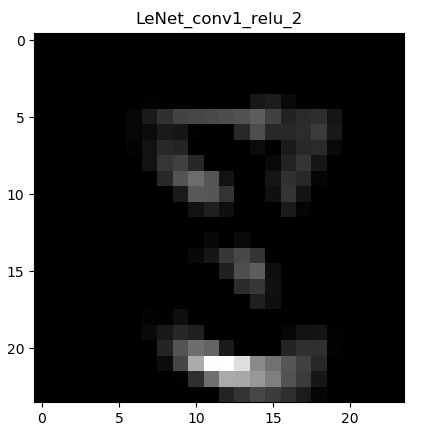
4.4 最大池化后的特征图
下面显示卷积->ReLu激活函数->最大池化层的图像:
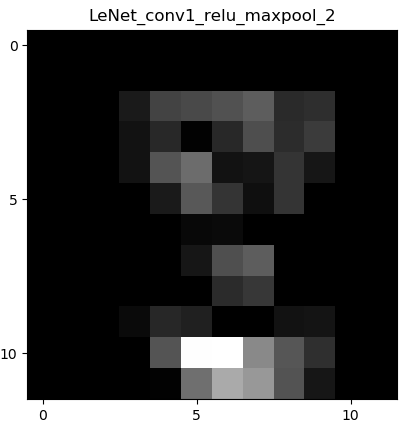
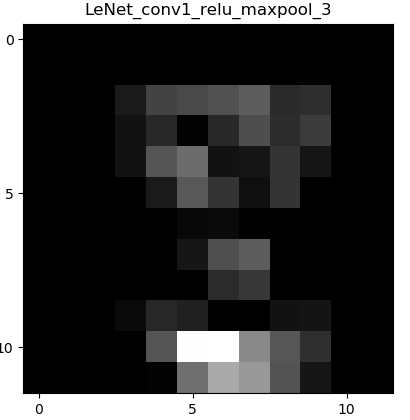
显而易见,图像经过最大池化层之后,像素缩小了一半,这也正是池化层(下采样)的作用:缩小图像尺寸。能减少网络的计算量,也能在一定程度上缓解过拟合的问题。但这只是一定程度上,并且池化层可能会过滤掉很多有用的特征。
值得注意的是,本程序用的池化层都是最大池化max_pooling,所以可以发现,相比较前一层的特征图,整体图片的亮度变得更亮了,因为最大池化是选择区域中值最大的值进行保留。
4.4 最后的特征图
下图显示的是多次卷积和激活函数和最大池化后的图片: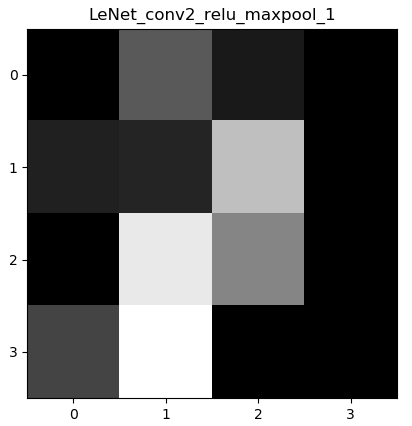
可以看到,经过多次卷积、激活函数和池化层之后,图像已经“面目全非”,肉眼已经完全分辨不出图片原本代表着什么数字。但是对于神经网络来说,图片永远只是一堆数字,这张图片也是神经网络计算出来的数字特征。在经过这一步之后,通过将图片展平即变为一维向量x = x.view(x.size(0), -1)。由于是最后一层是4 4 16的输出,所以展平后就得到了长度为4 4 16 = 256的一维向量。再通过全连接层,可将一维向量变为长度为10的输出(0-9共10类)。
4.5 输出
因为进入全连接层之后,tensor已经变为了一维向量,无法以图片的形式显示,所以只能输出看具体的数字。以下为LeNet全连接层的代码:
self.fc1 = nn.Linear(16 * 4 * 4, 120)self.fc2 = nn.Linear(120, 84)self.fc3 = nn.Linear(84, 10)
并且输出全连接层各个位置的张量大小以及最后一层的输出:
x = x.view(x.size(0), -1)print(x[0].size())x = self.fc1(x)print(x[0].size())x = F.relu(x)x = self.fc2(x)print(x[0].size())x = F.relu(x)x = self.fc3(x)print(x[0])
输出结果如下:
可以看到,展平后的张量长度的确为256,经过一层全连接层之后长度变为120,然后是84,最后输出最后一层的张量。可以看到,张量每个元素的值代表着该类的概率,由于该图片识别为8,所以在index为8的地方值最大,最后得出该手写体为数字“8”的结论。softmax也是根据张量计算出最后的预测值。

若有收获,就点个赞吧
0 人点赞
