设置彩色传感器()工作状态为()

彩色传感器有三种工作模式:环境光模式、反射光模式、颜色模式。使用彩色传感器时必须先设置工作模式。环境光模式下发光LED灯不亮,颜色模式下发光LED灯亮彩灯,此两种模式下发光LED灯皆为系统固定设置,皆不支持用户自定义。反射光模式下发光LED灯默认亮红灯,用户也可以自定义编程设置亮灯组合。
校准彩色传感器()()()为()

自定义校准彩色传感器的环境光或反射光强度的最大值或者最小值,值为相对值,环境光模式取值范围为0(黑暗)~100(最亮),反射光模式取值范围为0(黑色物体)~100(白色物体)。校准后以设定的最大值为量程的100,以设定的最小值为量程的0。相当于人为重新设定新量程。
重置彩色传感器()的()

把彩色传感器之前校准设定的环境光或反射光的最大值或最小值重置,恢复默认设置,即最大值100,最小值0。
设置彩色传感器()反射光模式的LED灯为()

彩色传感器自带发光LED灯,在反射光模式下发光LED灯默认亮红灯,用户可选择设置红、绿、蓝三种颜色。
获取彩色传感器()的环境光值

获取彩色传感器检测的环境光值,此数值为相对强度值,取值范围为0(黑暗)~100(最亮)(下同)。
注意:使用此条语句之前必须先设置彩色传感器的工作模式为环境光模式。
彩色传感器()的环境光值()()

判断彩色传感器检测到的环境光强度值条件是否为真。
注意:使用此条语句之前必须先设置彩色传感器的工作模式为环境光模式。
获取彩色传感器()的反射光值

获取彩色传感器检测到的反射光值,其值为相对强度值,取值范围为0(黑色物体)~100(白色物体)(下同)。
注意:使用此条语句之前必须先设置彩色传感器的工作模式为反射光模式。
彩色传感器()的反射光()值()()

判断彩色传感器检测到的反射光值条件是否为真。
注意:使用此条语句之前必须先设置彩色传感器的工作模式为反射光模式。
获取彩色传感器()识别到的颜色()值

获取彩色传感器识别到的以下三种类型的数值:
1、彩色传感器能识别8种指定颜色的ID值,取值范围为0/1/2/3/4/5/6/7/8。
可识别的颜色与ID数值对应关系如下表:
| 颜色ID | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|---|
| 颜色 | 无颜色 | 黑色 | 白色 | 红色 | 黄色 | 绿色 | 青色 | 蓝色 | 紫色 |
2、彩色传感器能检测颜色的红/绿/蓝分量值(即:R/G/B值),R/G/B取值范围0~255;
3、彩色传感器能检测颜色的色度/饱和度/明度(即:H/S/V值),H数值范围为0~360°,S/V数值范围为0~100。 注意:使用此条语句之前必须先设置彩色传感器的工作模式为颜色模式。
彩色传感器()识别到的颜色()

判断彩色传感器识别到的颜色ID数值条件是否为真,各值的输入范围同上。
注意:使用此条语句之前必须先设置彩色传感器的工作模式为颜色模式。
彩色传感器()识别到的颜色()()()

判断彩色传感器识别到的红/绿/蓝分量、色度/饱和度/明度数值条件是否为真,各值的输入范围同上。
注意:使用此条语句之前必须先设置彩色传感器的工作模式为颜色模式。
示例1 :

机器人程序启动后,将彩色传感器设置为环境光模式,将卧室测到的最强环境光值40作为自定义的量程100,天亮(环境光值到达自定义量程的50%,即数值20时)TBot-I响起床闹铃。
示例2 :
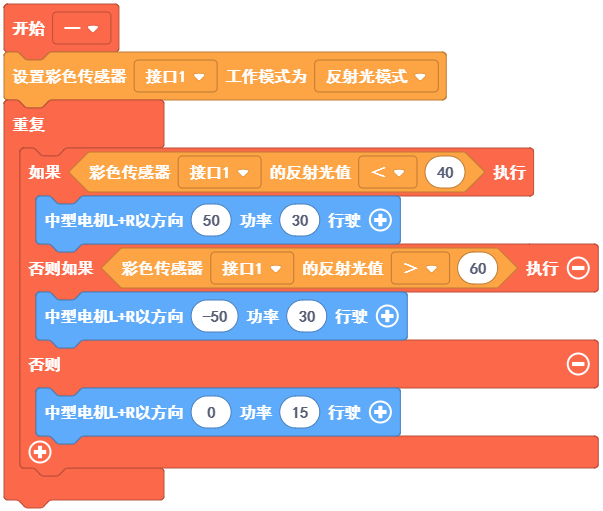
机器人程序启动后,将彩色传感器设置为反射光模式,机器人将循着黑色和白色线边缘线行驶。
示例3 :
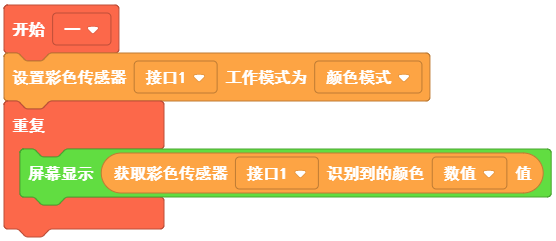
机器人程序启动后,将彩色传感器设置为颜色模式,机器人显示出不同颜色的ID。

若有收获,就点个赞吧
0 人点赞
