传感器丝印朝上水平放置,三个轴的方向指示以下图右侧为基准:X轴是水平且指向右边,Y轴是垂直且指向前方,Z轴指向水平面正上方。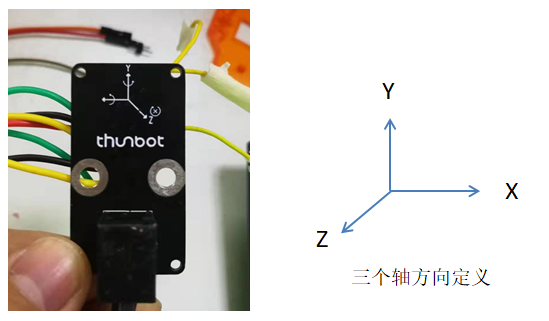
陀螺仪
1、 重置陀螺仪(接口1、2……)绕(X轴、Y轴、Z轴、所有轴)转过的角度。
- 注:重置相当于归零,陀螺仪转过的角度是相对于上次重置进行测量,程序启动默认重置。
2、获取陀螺仪(接口1、2……)绕(X轴、Y轴、Z轴)转过的角度°
- 注:上图轴箭头方向对自己顺时针转,角度为正;逆时针转为负,数值为累加值。
3、陀螺仪(接口1、2……)绕(X轴、Y轴、Z轴)转过的角度(逻辑比较)()°
4、 设置陀螺仪(接口1、2……)角速度量程为(0~±250、0~±500、0~±1000、0~±2000)°/s
5、获取陀螺仪(接口1、2……)在(X轴、Y轴、Z轴)角速度°/s
- 注:角速度方向分解到上图箭头方向为正;反之为负。
6、陀螺仪(接口1、2……)在(X轴、Y轴、Z轴)角速度(逻辑比较)()°/s
加速度计
1、 设置加速度计(接口1、2……)量程为(0~±2、0~±4、0~±8、0~±16)g
2、获取加速度计(接口1、2……)在(X轴、Y轴、Z轴)加速度m/s²
- 注:加速度方向分解到上图箭头方向为正;反之为负。
3、加速度计(接口1、2……)在(X轴、Y轴、Z轴)加速度(逻辑比较)()m/s²
姿态传感器
1、重置姿态传感器(接口1、2……)的航向。
- 注:姿态传感器上电时会复位航向值,重置相当于人为把航向值重置为0。
2、获取姿态传感器的(俯仰角、翻滚角、航向)°
- 俯仰角 :数值为绝对值,取值范围为-180°到180°,水平为0度,上仰转动为正,下俯转动为负。取值超过180°后跳变为-180°,同理取值超过-180°后跳变为180°。
- 翻滚角 :数值为绝对值,取值范围为-90°到90°,水平为0度,翻滚顺时针转为正,逆时针转为负。
- 航向:数值为相对值,取值范围为-180°到180°,上电复位或重置后航向为0,水平顺时针旋转为正,逆时针旋转为负。取值超过180°后跳变为-180°,同理取值超过-180°后跳变为180°。
3、 姿态传感器(接口1、2……)的(俯仰角、翻滚角、航向)(逻辑比较)()°
震动传感器
1、获取震动传感器(接口1、2……)检测到的震动强度。
- 注:取值范围0%~100%
2、震动传感器(接口1、2……)检测到震动强度(逻辑比较)()。

若有收获,就点个赞吧
0 人点赞
