一般功能:
比如高级定时器0,最大是108M,108M/65536/65536=39.76823……(最大定时时间)
如果你觉得时间不够,还可以使用定时器级联功能,三个定时器级联,就可以定时34万亿年。
高级/通用/基本
GD32F103只有三个定时器,一个高级Timer0,两个通用Timer1、2
计数模式
向上,向下,中央对齐。
其中中央对齐可以用在SVPWM控制算法中,产生三角载波。
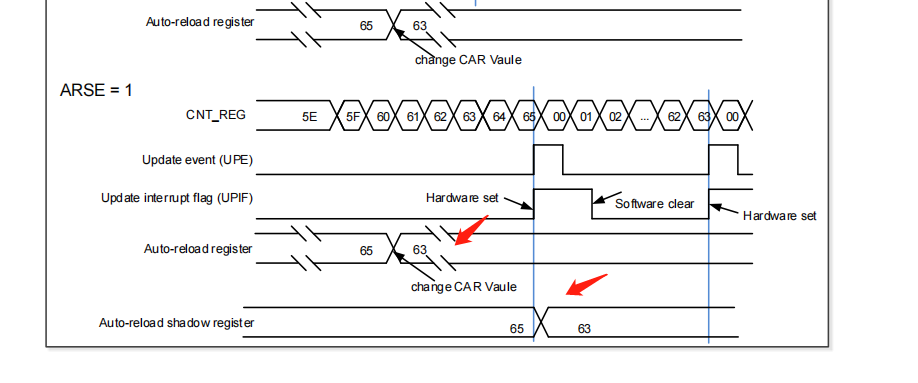
影子寄存器/缓冲寄存器
预分频寄存器与自动重载寄存器都是有影子寄存器的,只有在下一个周期你更改后的值才会生效。
问题1
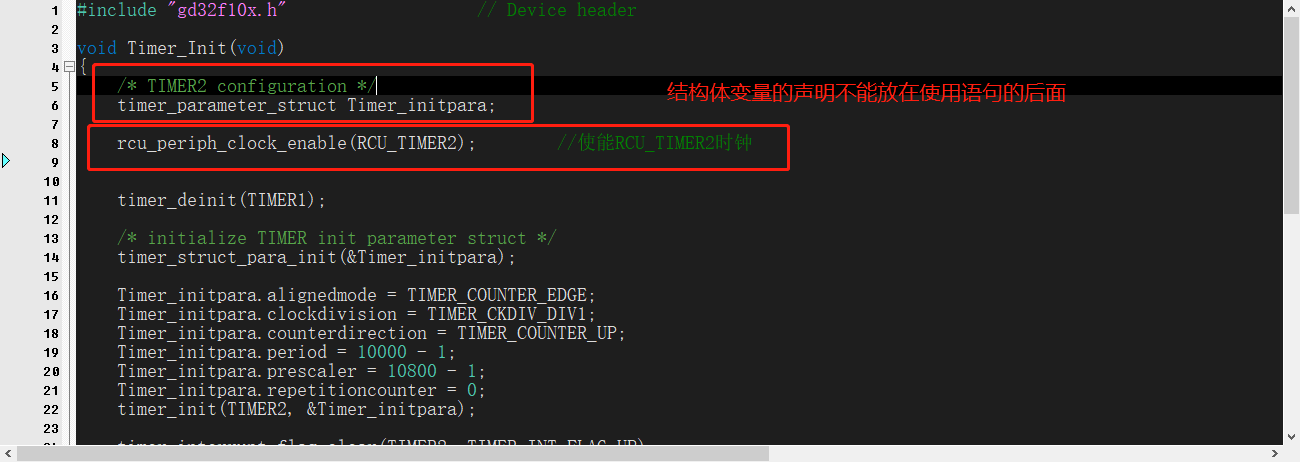
定时器-基本定时功能
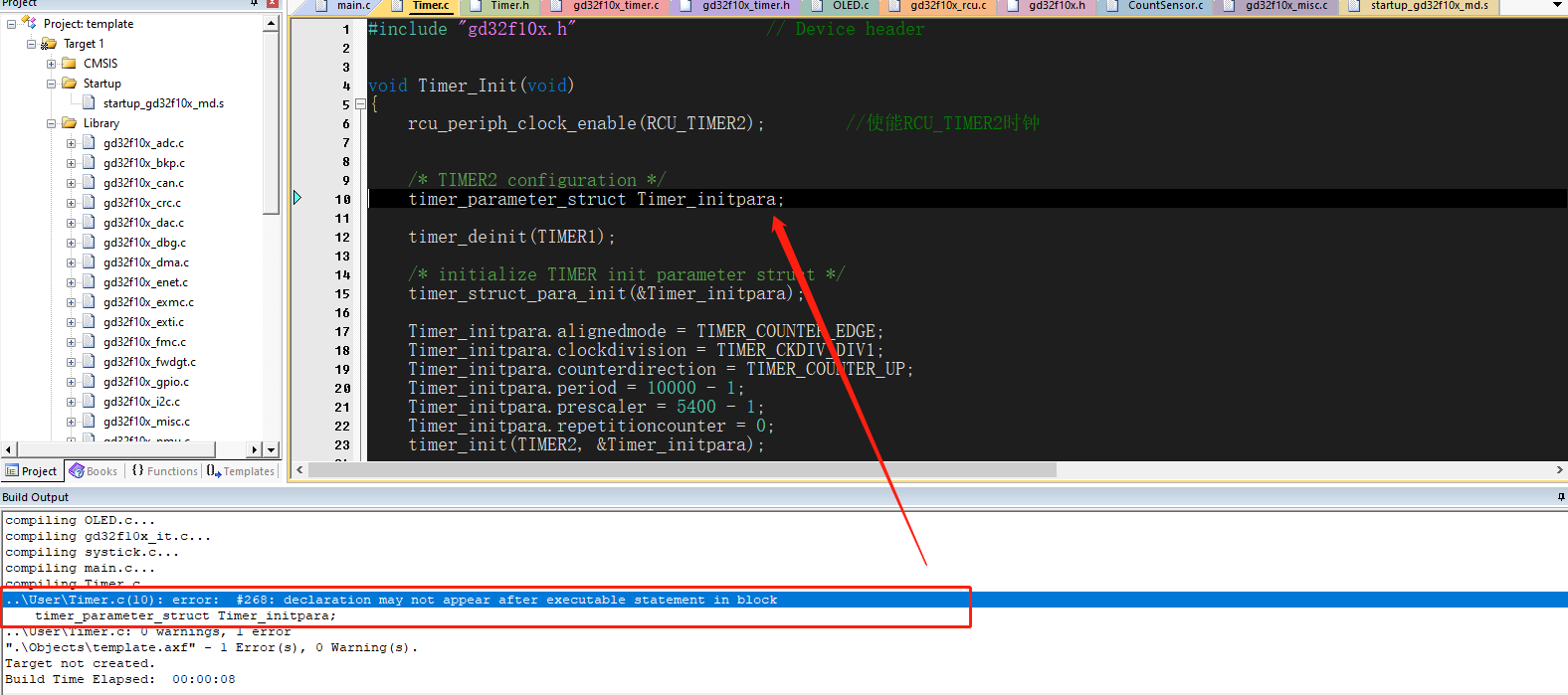
#include "gd32f10x.h" // Device headervoid Timer_Init(void){/* TIMER2 configuration */timer_parameter_struct Timer_initpara;rcu_periph_clock_enable(RCU_TIMER2); //使能RCU_TIMER2时钟timer_deinit(TIMER1);/* initialize TIMER init parameter struct */timer_struct_para_init(&Timer_initpara);Timer_initpara.alignedmode = TIMER_COUNTER_EDGE;Timer_initpara.clockdivision = TIMER_CKDIV_DIV1;Timer_initpara.counterdirection = TIMER_COUNTER_UP;Timer_initpara.period = 10000 - 1;Timer_initpara.prescaler = 10800 - 1;Timer_initpara.repetitioncounter = 0;timer_init(TIMER2, &Timer_initpara);//手动把更新中断标志位清除一下,避免刚初始化完成就进入中断timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);/* TIMER2 channel control update interrupt enable */timer_interrupt_enable(TIMER2, TIMER_INT_UP);timer_enable(TIMER2);/* enable and set key EXTI interrupt to the specified priority */nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2);nvic_irq_enable(TIMER2_IRQn, 1U, 1U);}//void TIMER2_IRQHandler(void)//{// if (timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP) == SET)// {//// timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);// }//}
#include "gd32f10x.h"#include "gd32f10x_libopt.h"#include "systick.h"#include "OLED.h"#include "Timer.h"uint16_t Num;int main(void){OLED_Init();Timer_Init();OLED_ShowString(1, 1, "Num:");while (1){OLED_ShowNum(1, 5, Num, 5);OLED_ShowNum(2, 5, timer_counter_read(TIMER2), 5);OLED_ShowNum(3, 5, timer_prescaler_read(TIMER2), 5);}}void TIMER2_IRQHandler(void){if (timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP) == SET){Num++;timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);}}
定时器-外部时钟功能
外部时钟,配置输入捕获功能IC
void Timer_Init(void) { / TIMER1 configuration / timer_parameter_struct Timer_initpara; timer_ic_parameter_struct timer_icinitpara;
rcu_periph_clock_enable(RCU_TIMER1); //使能RCU_TIMER1时钟rcu_periph_clock_enable(RCU_GPIOA);rcu_periph_clock_enable(RCU_AF);gpio_init(GPIOA, GPIO_MODE_IPU, GPIO_OSPEED_50MHZ, GPIO_PIN_0);timer_deinit(TIMER1);/* initialize TIMER init parameter struct */timer_struct_para_init(&Timer_initpara);Timer_initpara.alignedmode = TIMER_COUNTER_EDGE;Timer_initpara.clockdivision = TIMER_CKDIV_DIV1;Timer_initpara.counterdirection = TIMER_COUNTER_UP;Timer_initpara.period = 10 - 1;Timer_initpara.prescaler = 1 - 1;Timer_initpara.repetitioncounter = 0;timer_init(TIMER1, &Timer_initpara);/* TIMER1 CH0 input capture configuration */timer_icinitpara.icpolarity = TIMER_IC_POLARITY_FALLING;timer_icinitpara.icselection = TIMER_IC_SELECTION_DIRECTTI;timer_icinitpara.icprescaler = TIMER_IC_PSC_DIV1;timer_icinitpara.icfilter = 0x00;timer_input_capture_config(TIMER1, TIMER_CH_0, &timer_icinitpara);/* slave mode selection : TIMER1 *//* TIMER1 input trigger : external trigger connected to CI0 */timer_input_trigger_source_select(TIMER1,TIMER_SMCFG_TRGSEL_CI0FE0);timer_slave_mode_select(TIMER1,TIMER_SLAVE_MODE_EXTERNAL0);//手动把更新中断标志位清除一下,避免刚初始化完成就进入中断timer_interrupt_flag_clear(TIMER1, TIMER_INT_FLAG_UP);/* TIMER2 channel control update interrupt enable */timer_interrupt_enable(TIMER1, TIMER_INT_UP);timer_enable(TIMER1);/* enable and set key EXTI interrupt to the specified priority */nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2);nvic_irq_enable(TIMER1_IRQn, 1U, 1U);
}
//void TIMER2_IRQHandler(void) //{
// if (timer_interrupt_flag_get(TIMER2, TIMER_INT_FLAG_UP) == SET)
// {
//
// timer_interrupt_flag_clear(TIMER2, TIMER_INT_FLAG_UP);
// }
//}
<a name="MNfPo"></a># 输出比较功能-PWM输出比较可以通过比较CNT与CCR寄存器值的关系,来对输出电平进行置1、置0或翻转的操作,用于输出一定频率和占空比的PWM波形。<br />每个高级定时器和通用定时器都拥有4个输出比较通道。<br />高级定时器的前3个通道额外拥有死区生成和互补输出的功能。<br />死区时间的插入,确保了通道互补的两路信号不会同时有效。<br />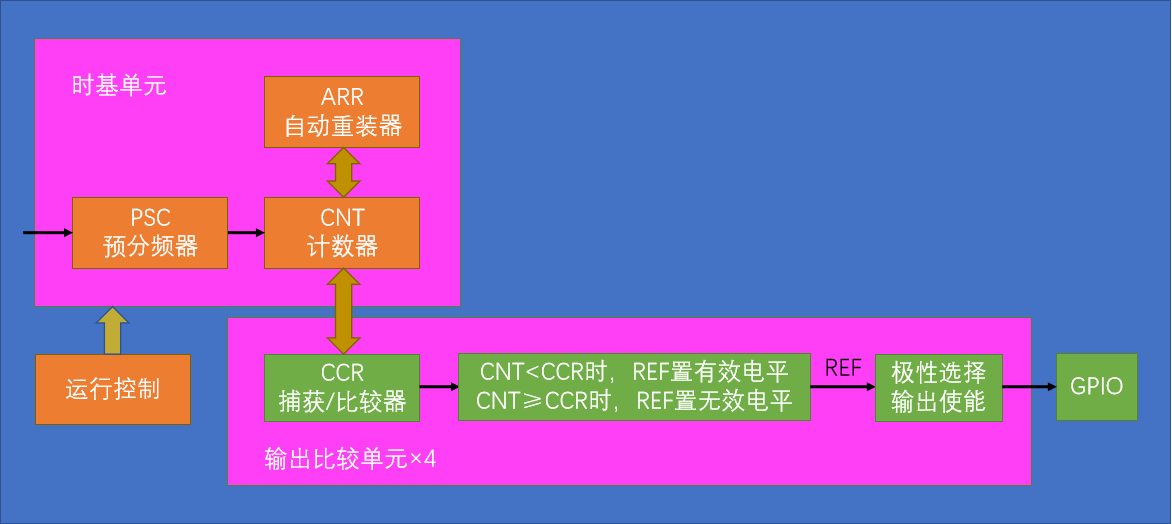<br />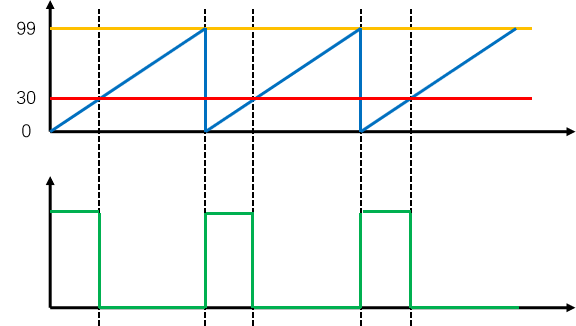<br /><a name="nbIIe"></a>## 呼吸灯```c#include "gd32f10x.h" // Device headervoid PWM_Init(void){//输出比较与定时器初始化结构体timer_oc_parameter_struct timer_ocintpara;timer_parameter_struct timer_initpara;//时钟 TIMER1 GPIOArcu_periph_clock_enable(RCU_TIMER1);rcu_periph_clock_enable(RCU_GPIOA);rcu_periph_clock_enable(RCU_AF);//PA1初始化 复用推挽输出gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_1);timer_deinit(TIMER1);/* TIMER1 参数配置 */timer_initpara.prescaler = 10800 - 1; //PSCtimer_initpara.alignedmode = TIMER_COUNTER_EDGE;timer_initpara.counterdirection = TIMER_COUNTER_UP;timer_initpara.period = 100 - 1; //ARRtimer_initpara.clockdivision = TIMER_CKDIV_DIV1;timer_initpara.repetitioncounter = 0;timer_init(TIMER1,&timer_initpara);//输出比较参数配置timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH;//高极性,不反转,REF直接输出timer_ocintpara.outputstate = TIMER_CCX_ENABLE;//输出使能timer_channel_output_config(TIMER1,TIMER_CH_1,&timer_ocintpara);/* CH1 configuration in PWM mode1,duty cycle 0% */timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_1,0);//CCR 占空比timer_channel_output_mode_config(TIMER1,TIMER_CH_1,TIMER_OC_MODE_PWM0);//PWM模式0 模式1timer_channel_output_shadow_config(TIMER1,TIMER_CH_1,TIMER_OC_SHADOW_DISABLE);/* auto-reload preload enable */timer_auto_reload_shadow_enable(TIMER1);/* auto-reload preload enable */timer_enable(TIMER1);}void PWM_SetCompare1(uint16_t Compare){timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_1,Compare);}
#include "gd32f10x.h"#include "gd32f10x_libopt.h"#include "systick.h"#include "OLED.h"#include "Timer.h"#include "PWM.h"uint8_t i;int main(void){OLED_Init();PWM_Init();OLED_ShowString(1, 1, "Duty: %");while (1){for (i = 0; i <= 100; i++){PWM_SetCompare1(i);Delay_ms(10);OLED_ShowNum(1, 6, i, 3);}for (i = 0; i <= 100; i++){PWM_SetCompare1(100 - i);Delay_ms(10);OLED_ShowNum(1, 6, i, 3);}}}
输出比较-互补、死区时间、刹车
1.高级定时器只有 TIMER0 四通道定时器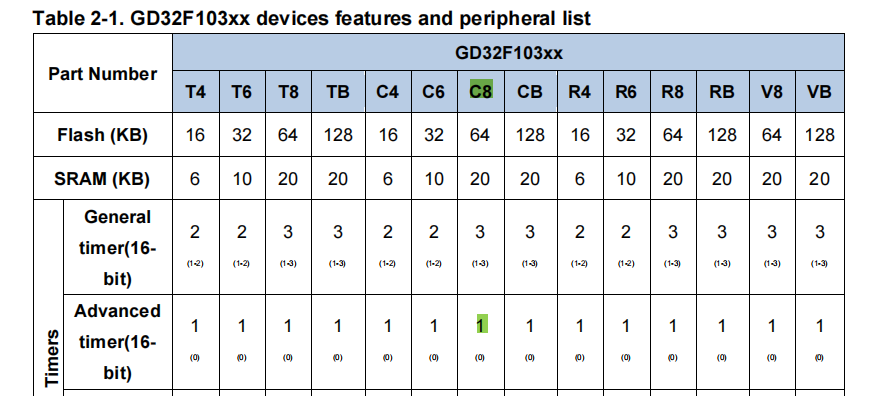
通过配置互补通道PB13 PA8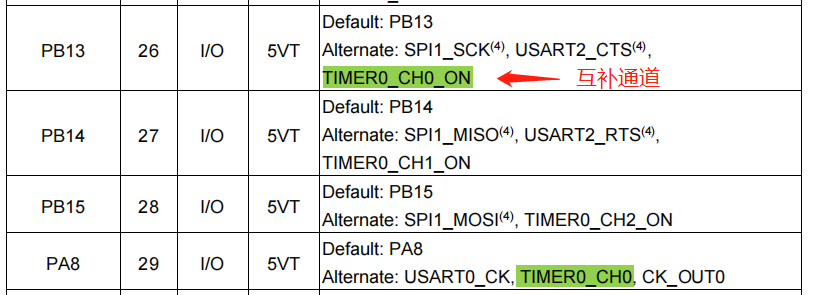
配置刹车PB12
#include "gd32f10x.h" // Device headervoid PWM_Init(void){//输出比较与定时器初始化结构体 刹车结构体timer_oc_parameter_struct timer_ocintpara;timer_parameter_struct timer_initpara;timer_break_parameter_struct timer_breakpara;//时钟 TIMER0 GPIOA GPIOBrcu_periph_clock_enable(RCU_TIMER0);rcu_periph_clock_enable(RCU_GPIOA);rcu_periph_clock_enable(RCU_GPIOB);rcu_periph_clock_enable(RCU_AF);//PA1初始化 复用推挽输出gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_8);//PB13 互补通道初始化 复用推挽输出gpio_init(GPIOB, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_13);/* configure PB12(TIMER0 BKIN) as alternate function */gpio_init(GPIOB, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_12);timer_deinit(TIMER0);/* TIMER0 参数配置 */timer_initpara.prescaler = 108 - 1; //PSCtimer_initpara.alignedmode = TIMER_COUNTER_EDGE;timer_initpara.counterdirection = TIMER_COUNTER_UP;timer_initpara.period = 600 - 1; //ARRtimer_initpara.clockdivision = TIMER_CKDIV_DIV1;timer_initpara.repetitioncounter = 0;timer_init(TIMER0,&timer_initpara);//输出比较参数配置timer_ocintpara.outputstate = TIMER_CCX_ENABLE;//输出使能timer_ocintpara.outputnstate = TIMER_CCXN_ENABLE;//互补输出使能timer_ocintpara.ocpolarity = TIMER_OC_POLARITY_HIGH;//高极性,不反转,REF直接输出timer_ocintpara.ocnpolarity = TIMER_OCN_POLARITY_HIGH;timer_ocintpara.ocidlestate = TIMER_OC_IDLE_STATE_HIGH;timer_ocintpara.ocnidlestate = TIMER_OCN_IDLE_STATE_HIGH;//通道选择timer_channel_output_config(TIMER0,TIMER_CH_0,&timer_ocintpara);/* CH0 configuration in PWM mode1,duty cycle 0% */timer_channel_output_pulse_value_config(TIMER0,TIMER_CH_0,0);//CCR 占空比timer_channel_output_mode_config(TIMER0,TIMER_CH_0,TIMER_OC_MODE_PWM0);//PWM模式0 模式1timer_channel_output_shadow_config(TIMER0,TIMER_CH_0,TIMER_OC_SHADOW_ENABLE);/* automatic output enable, break, dead time and lock configuration*/timer_breakpara.runoffstate = TIMER_ROS_STATE_ENABLE;timer_breakpara.ideloffstate = TIMER_IOS_STATE_ENABLE ;timer_breakpara.deadtime = 164;timer_breakpara.breakpolarity = TIMER_BREAK_POLARITY_LOW;timer_breakpara.outputautostate = TIMER_OUTAUTO_ENABLE;timer_breakpara.protectmode = TIMER_CCHP_PROT_OFF;timer_breakpara.breakstate = TIMER_BREAK_ENABLE;timer_break_config(TIMER0,&timer_breakpara);/* auto-reload preload enable */// timer_auto_reload_shadow_enable(TIMER0);/* TIMER0 primary output function enable */timer_primary_output_config(TIMER0,ENABLE);/* TIMER0 channel control update interrupt enable */timer_interrupt_enable(TIMER0,TIMER_INT_CMT);/* TIMER0 break interrupt disable */timer_interrupt_disable(TIMER0,TIMER_INT_BRK);nvic_priority_group_set(NVIC_PRIGROUP_PRE1_SUB3);nvic_irq_enable(TIMER0_TRG_CMT_IRQn, 0, 1);/* TIMER0 counter enable */timer_enable(TIMER0);}void PWM_SetCompare1(uint16_t Compare){timer_channel_output_pulse_value_config(TIMER0,TIMER_CH_0,Compare);}
互补输出:
死区时间: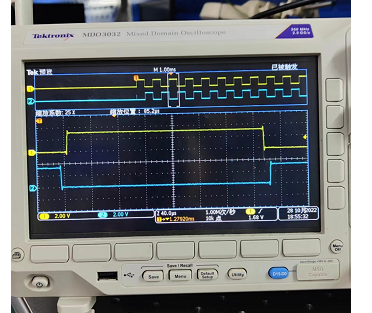
刹车功能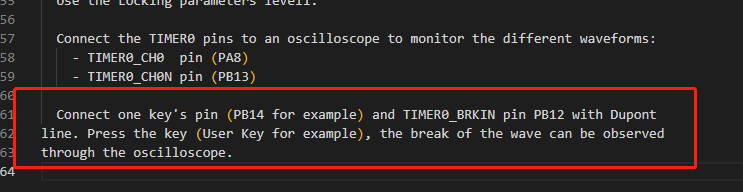

若有收获,就点个赞吧
0 人点赞
