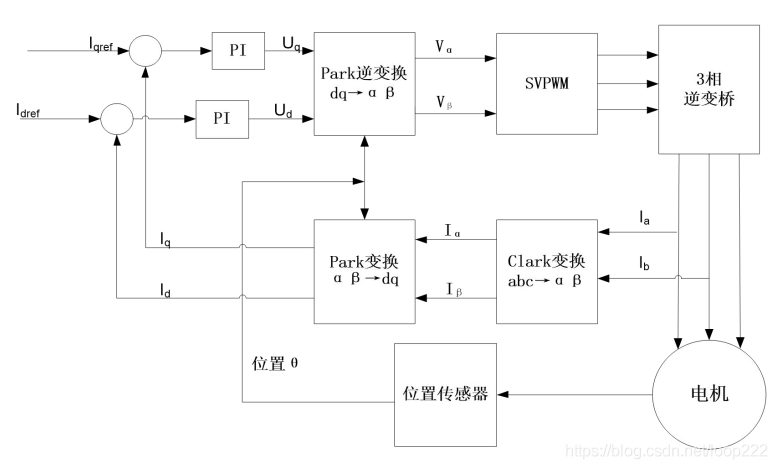
1、测量电机三相定子电流,可得到Ia 和Ib。将三相电流通过Clark变换至两相电流Iα和Iβ ,
2、按照控制环上一次迭代计算出的电机角度, 通过Park变换得到旋转坐标系下相互正交的电流Id和Iq,
3、Id、Iq与设定值进行比较得到电流环PI控制器的输入。调节PI控制器的参数,得到Ud 和Uq ,即要施加到电机上的电压矢量,
4、通过位置传感器得到新的电机位置,从而得到新的角度和转速。新的电机角度可告知 FOC算法下一个电压矢量在何处,
5、通过使用新的电机角度,Vd 和Vq经过Park逆变换产生下一个正交电压值Vα、Vβ,
6、采用SVPWM算法判定其合成的电压矢量位于哪个扇区,计算出三相各桥臂开关管的导通时间,最后经过三相逆变器驱动模块输出电机所需的三相电压。

若有收获,就点个赞吧
0 人点赞
