学习目标
- 可以通过MPU6050获取加速度信息
-
学习内容
MPU6050
MPU6050是一种常用的集成电路(IC),结合了3轴陀螺仪和3轴加速度计。它用于各种需要运动跟踪和感应的电子项目和设备。MPU6050由英飞凌科技公司(InvenSense)制造,现在已被TDK收购。它的一些主要特点包括:
3轴陀螺仪:测量角速度,单位为每秒度。
- 3轴加速度计:测量三个方向的加速度。
- 数字运动处理器(DMP):对原始传感器数据执行复杂的计算。
- I2C通信接口:可以与微控制器和其他数字设备轻松集成。
MPU6050在涉及运动跟踪、手势识别和定向检测的项目中很受欢迎。它通常用于无人机、机器人、游戏和虚拟现实系统,以及各种消费电子设备中。开发人员和爱好者经常将MPU6050与Arduino、树莓派和其他嵌入式系统集成,以创建各种运动感应应用程序。
在MPU6050中,DMP代表数字运动处理器(Digital Motion Processor)。DMP是一个处理器,内置在MPU6050中,用于处理原始的陀螺仪和加速度计数据。它可以执行复杂的运动处理算法,如姿态估计、运动追踪和运动补偿,以提供更精确的运动数据。
通过使用DMP,用户可以从MPU6050获得处理过的数据,而不需要过多的处理器负担。DMP可以执行传感器融合算法,将来自陀螺仪和加速度计的数据融合在一起,以提供更准确、更稳定的姿态和运动跟踪信息。
使用DMP可以简化开发过程,因为它减少了对外部处理器的要求,同时提供了更高级的功能。这使得开发人员能够更容易地实现复杂的运动感应应用,如姿态控制、手势识别和空间定位等。
欧拉角
欧拉角(Euler angles)是一种用于描述物体在三维空间中旋转的方式。它由三个角度组成,分别表示绕三个相互垂直的轴(通常是固定的坐标系的X、Y、Z轴)旋转的量。这三个旋转通常被称为“滚动”(Roll)、“俯仰”(Pitch)和“偏航”(Yaw)。
可以通过右手法则判断rpy: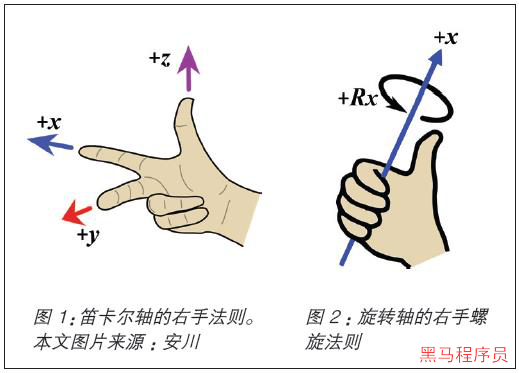
- 滚动(Roll):绕X轴旋转,将物体沿着X轴的正方向旋转。这种旋转会导致物体绕着自身的横轴旋转。
- 俯仰(Pitch):绕Y轴旋转,将物体沿着Y轴的正方向旋转。这种旋转会导致物体绕着自身的纵轴旋转。
- 偏航(Yaw):绕Z轴旋转,将物体沿着Z轴的正方向旋转。这种旋转会导致物体绕着自身的垂直轴旋转。

欧拉角通常用于描述物体的旋转姿态,并且相对直观,易于理解。但是,使用欧拉角存在一些问题,特别是在物体进行多次旋转时,可能会产生奇异性和歧义性。这些问题可以导致万向节锁(Gimbal lock)等旋转表示上的限制,特别是当俯仰角接近90度或270度时。
尽管欧拉角在许多情况下都很有用,并且易于人类理解,但在某些情况下,使用四元数等其他表示方法可能更适合处理旋转问题,特别是在需要连续旋转操作或精确姿态控制的情况下。
移植与使用
bsp_mpu6050.cbsp_mpu6050.hdmpKey.hdmpmap.hinv_mpu.cinv_mpu.hinv_mpu_dmp_motion_driver.cinv_mpu_dmp_motion_driver.h
- bsp_mpu6050 为mpu6050驱动
- inv_mpu inv_mpu_dmp_motion_driver为dmp处理器,可以计算出当前的欧拉角。
测试代码:
#include "gd32f4xx.h"#include "systick.h"#include <stdio.h>#include "main.h"#include "Usart.h"#include "I2C.h"#include "bsp_mpu6050.h"#include "inv_mpu.h"#include "inv_mpu_dmp_motion_driver.h"void Usart0_recv(uint8_t* data, uint32_t len) {printf("recv: %s\r\n", data);}int main(void){nvic_priority_group_set(NVIC_PRIGROUP_PRE4_SUB0);systick_config();Usart_init();I2C_init();printf("start \r\n");delay_1ms(100);while(MPU6050_Init()) {delay_1ms(200);}while(mpu_dmp_init()) {delay_1ms(200);}short gx, gy, gz;float pitch,roll,yaw;while(1) {MPU6050ReadGyro(&gx, &gy, &gz);mpu_dmp_get_data(&pitch, &roll, &yaw);printf("(%d %d %d)(%f %f %f) \r\n", gx, gy, gz, roll, pitch, yarw);delay_1ms(15);}}
练习
- 实现mpu6050数据读取

若有收获,就点个赞吧
0 人点赞
