功能需求
- 能够独自直立不倒,并且可以前行
- 电池没电时,能够报警提示
- 提供显示功能,可以显示一些信息
- 提供用户接口,例如按键和开关等,方便用户控制
- 提供蓝牙方案,方便无线操控
功能拆解
电机控制
姿态控制
供电
交互提示相关
蓝牙通讯
需求中要求可以无线操控
原理图与器件选型
电机控制
电机
电机我们采用N20电机,但是是包含编码器的。包含编码器的特点是,可以采样电机的转速,知道电机的速度;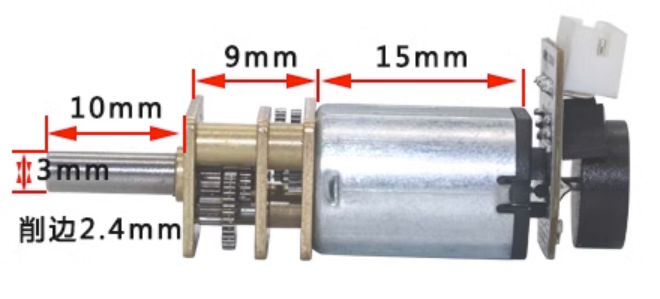
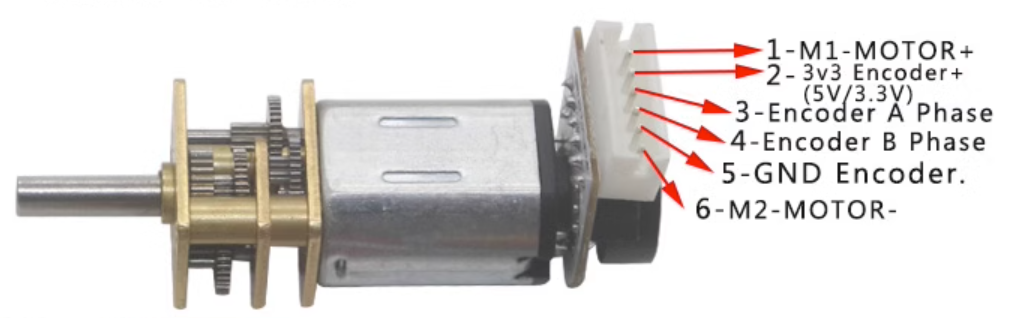
接线方式如下: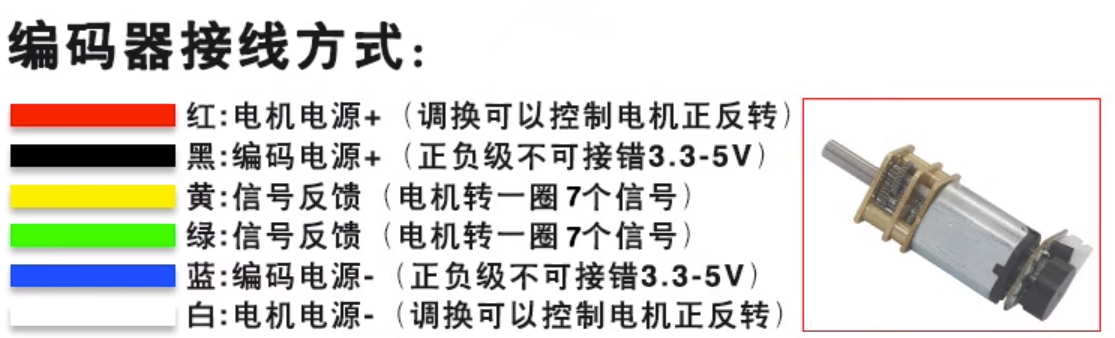
接口线距如下: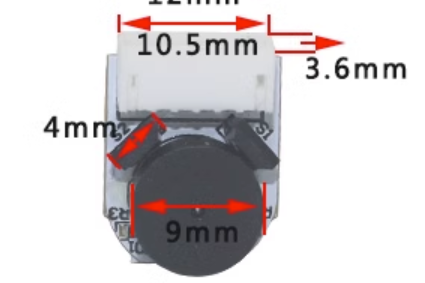
6根针的接口,也就是有7个空挡,宽度是10.5,针的间距就是10.5/7 = 1.5mm.
参考链接:https://item.taobao.com/item.htm?id=580556536472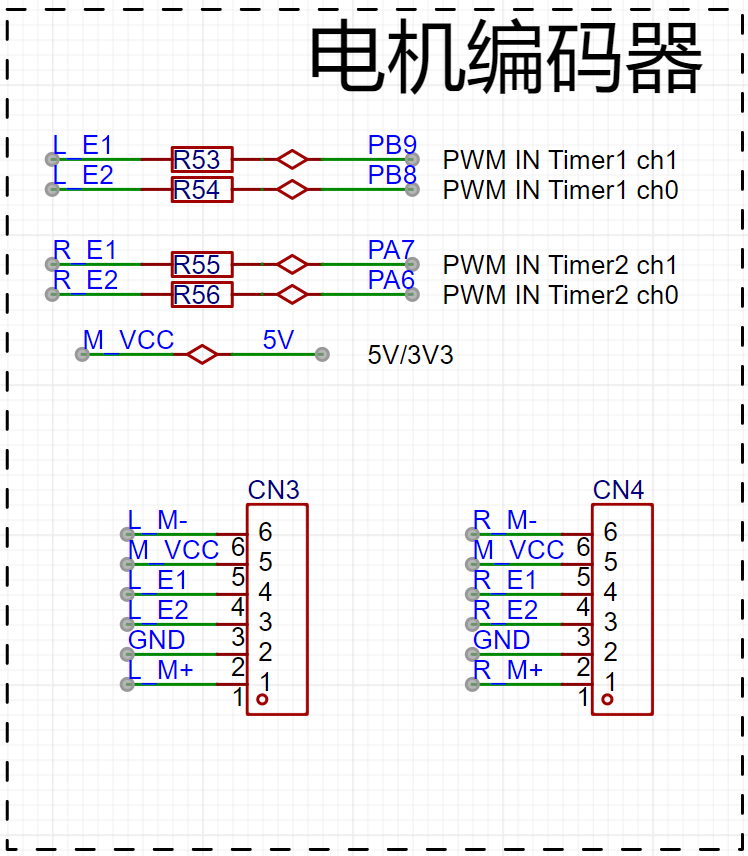
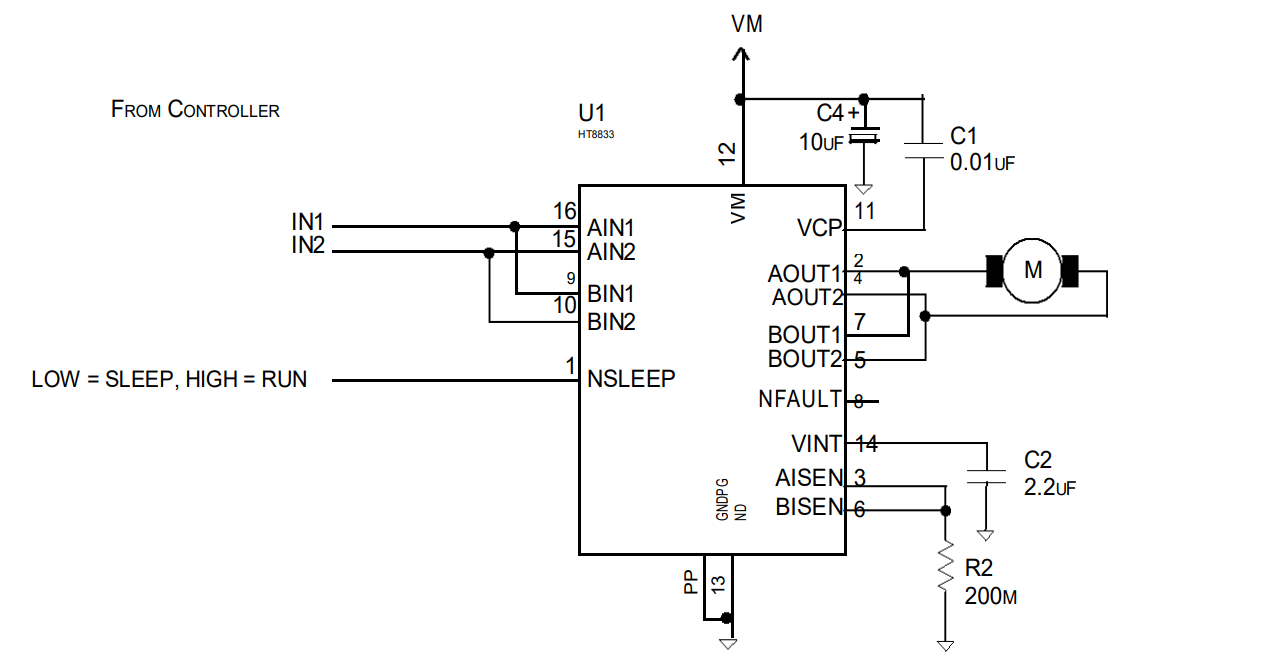
驱动芯片
采用DRV8833。特点是,一个芯片,支持两个电机。
参考链接: https://item.szlcsc.com/3260521.html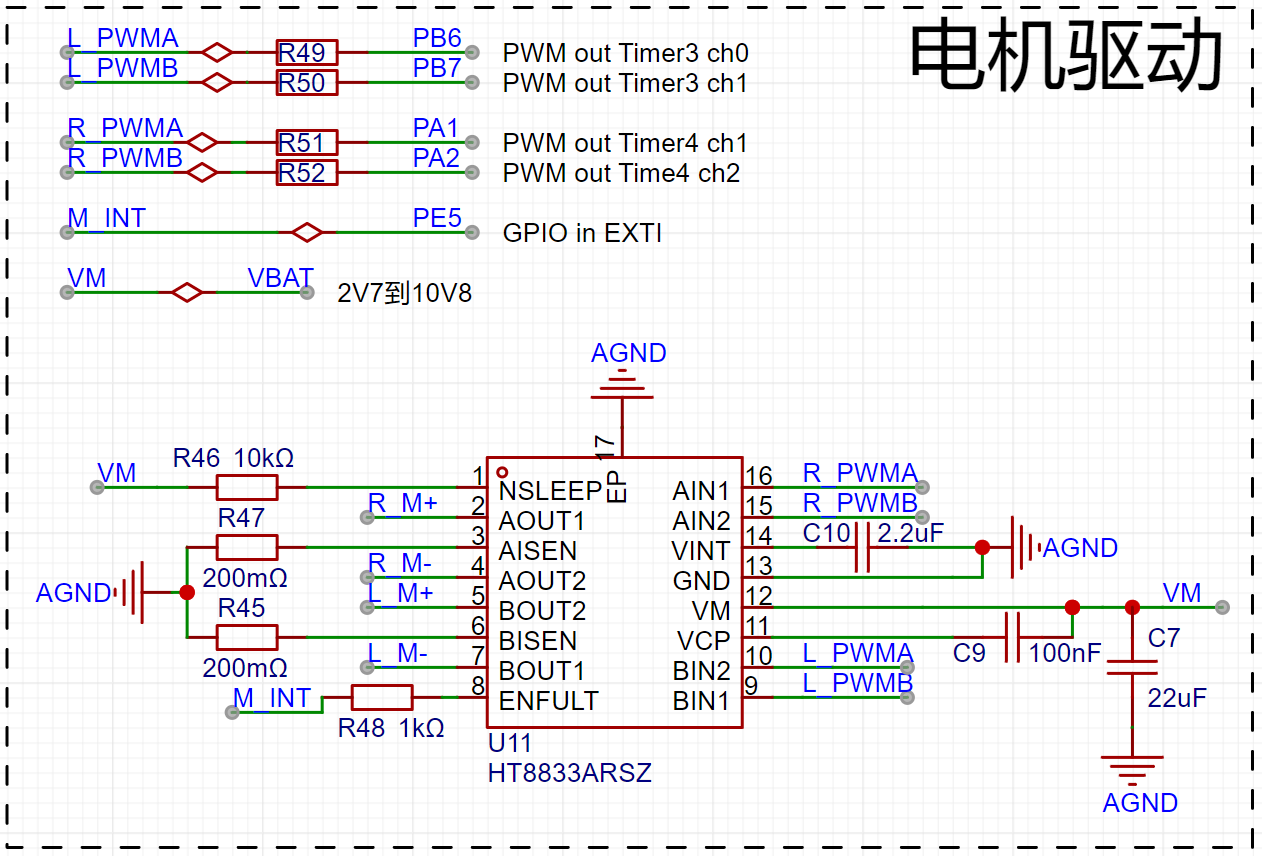
C2928790电机驱动芯片_HT8833ARSZ规格书_HTCSEMI(海天芯)电机驱动芯片规格书.PDF%E7%94%B5%E6%9C%BA%E9%A9%B1%E5%8A%A8%E8%8A%AF%E7%89%87%E8%A7%84%E6%A0%BC%E4%B9%A6.PDF%22%2C%22size%22%3A3080913%2C%22ext%22%3A%22pdf%22%2C%22source%22%3A%22%22%2C%22status%22%3A%22done%22%2C%22download%22%3Atrue%2C%22taskId%22%3A%22uc20f30a8-14ff-4270-b64d-45d5afbcae5%22%2C%22taskType%22%3A%22upload%22%2C%22type%22%3A%22application%2Fpdf%22%2C%22__spacing%22%3A%22both%22%2C%22mode%22%3A%22title%22%2C%22id%22%3A%22ue1654630%22%2C%22margin%22%3A%7B%22top%22%3Atrue%2C%22bottom%22%3Atrue%7D%2C%22card%22%3A%22file%22%7D)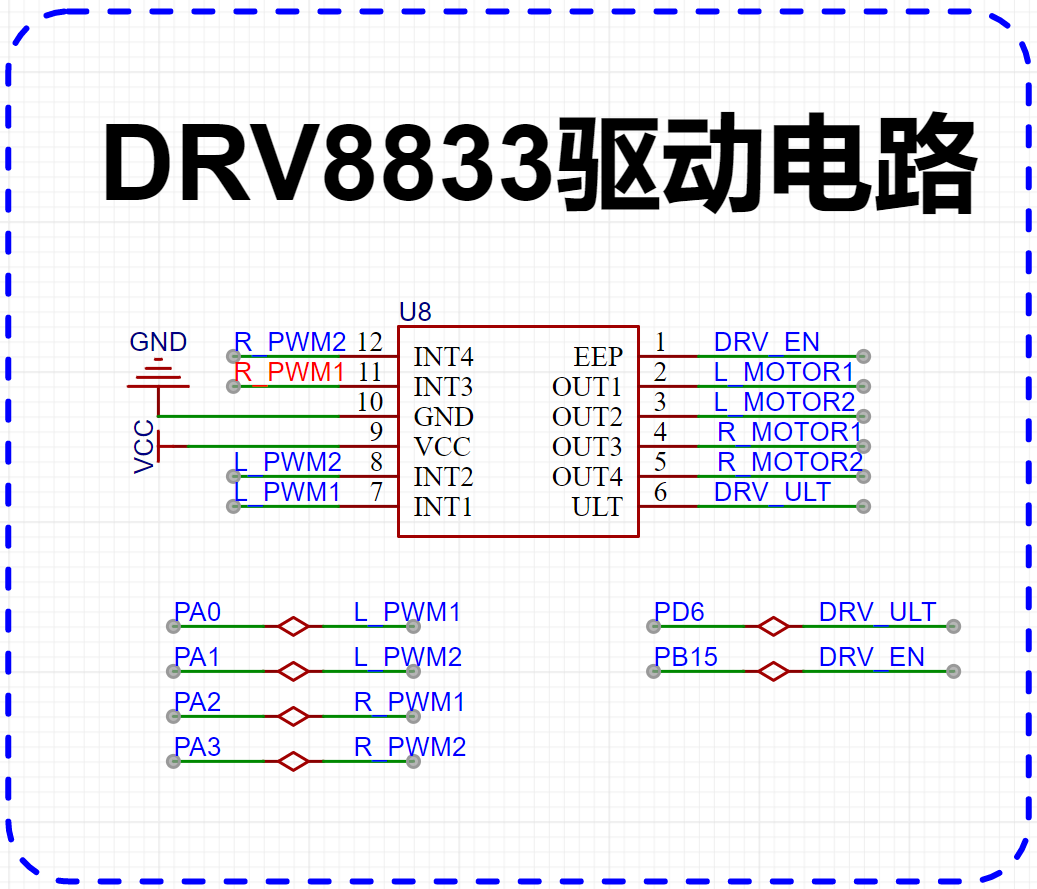
姿态获取
平衡车需要平衡,就需要实时知道自己的姿态。我们采用姿态传感器,MPU6050。考虑到设计过程中外围电路等问题,我们采用了模组。
参考链接:https://item.taobao.com/item.htm?id=692900999965&_u=p2a1bred668
这个模块通讯方式为I2C。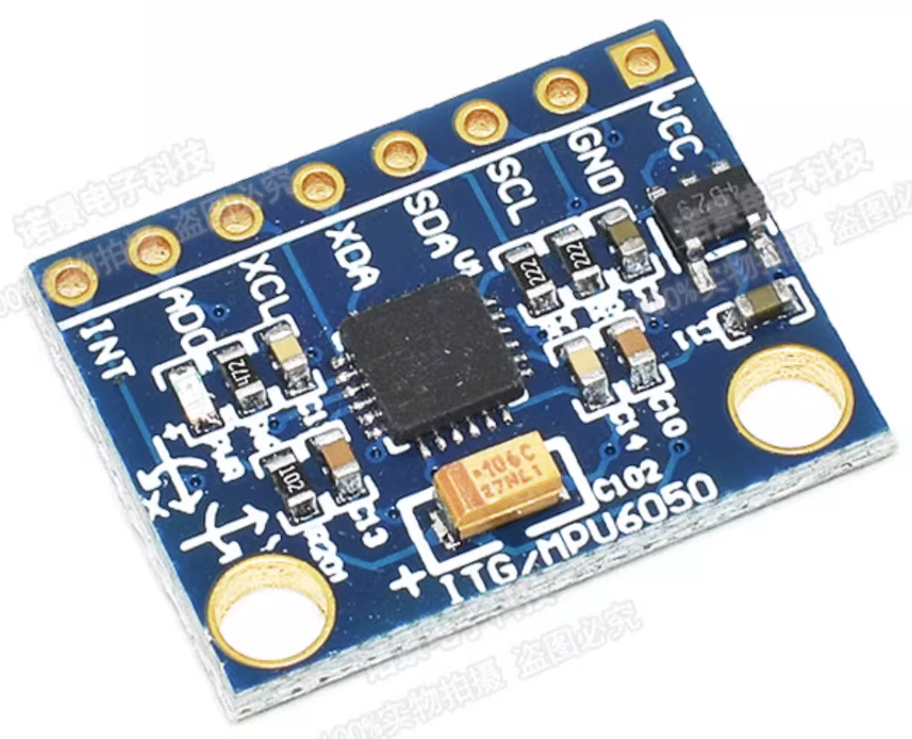
蜂鸣器
蓝牙模块
电压检测
OLED显示器
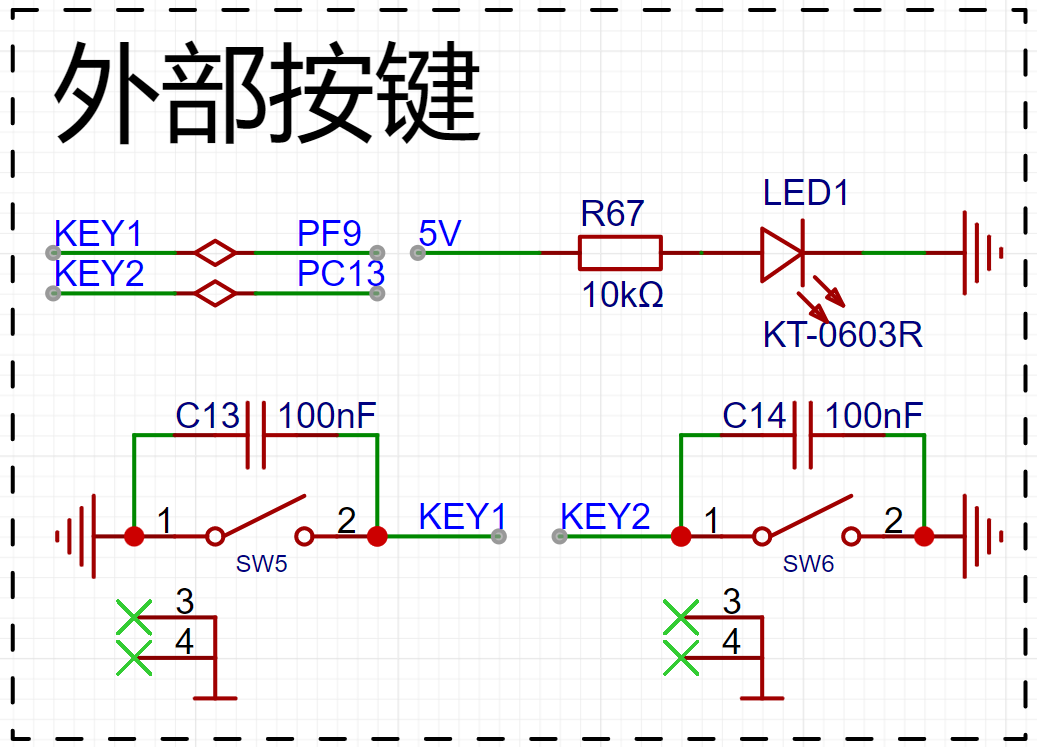
外接用户按键
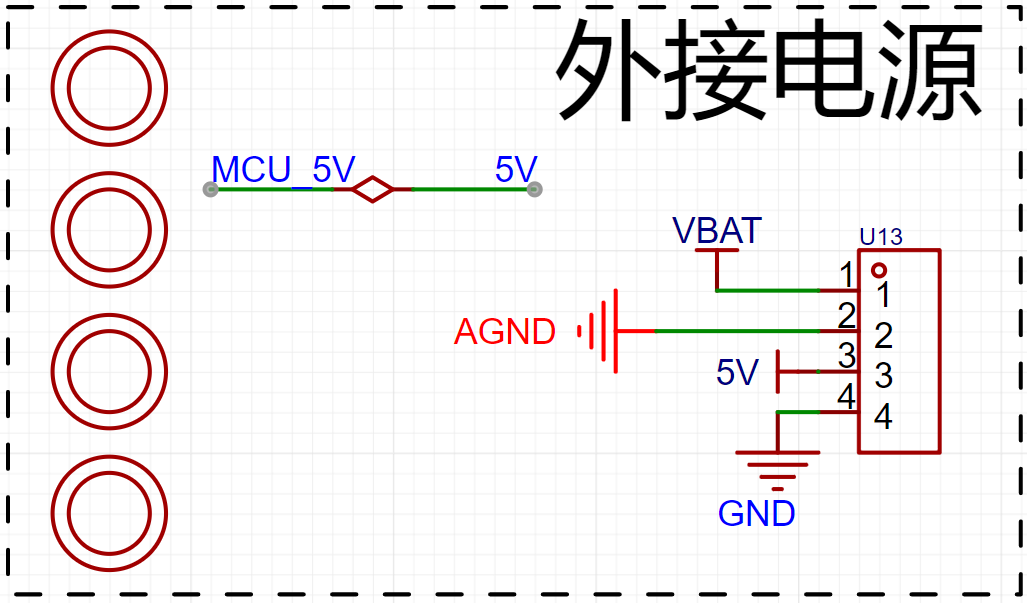
外接电源供电
引脚选择
电机接口
可以控制电机 | 控制 | 功能 | 功能选择 | 引脚 | | —- | —- | —- | —- | | 左轮正转控制 | PWM输出 |
Timer3``CH0|PB6| | 左轮反转控制 | |Timer3``CH1|PB7| | 右轮正转控制 | PWM输出 |Timer4``CH1|PA1| | 右轮反转控制 | |Timer4``CH2|PA2|可以读取编码器 | 采样 | 功能 | 功能选择 | 引脚 | | —- | —- | —- | —- | | 左轮编码器1采样 | PWM输入 |
Timer1``CH0|PB8| | 左轮编码器2采样 | |Timer1``CH1|PB9| | 右轮编码器1采样 | PWM输入 |Timer2``CH0|PA6| | 右轮编码器2采样 | |Timer2``CH1|PA7|过载反馈
普通IO输入即可。可以考虑到外部中断,此处IO选择PE5,实际设计根据具体情况而定。
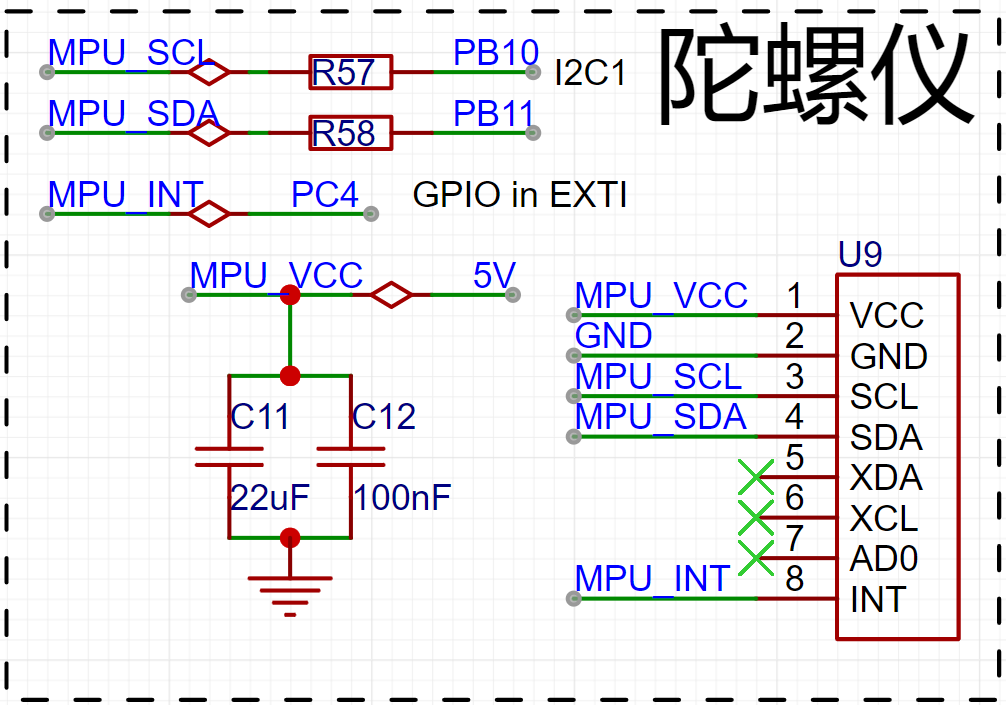
陀螺仪
通讯控制 | 通讯 | 功能 | 引脚 | | —- | —- | —- | | SCL | I2C1 |
PB10| | SDA | |PB11|反馈响应
普通IO输入即可。可以考虑到外部中断,此处IO选择PC4,实际设计根据具体情况而定。
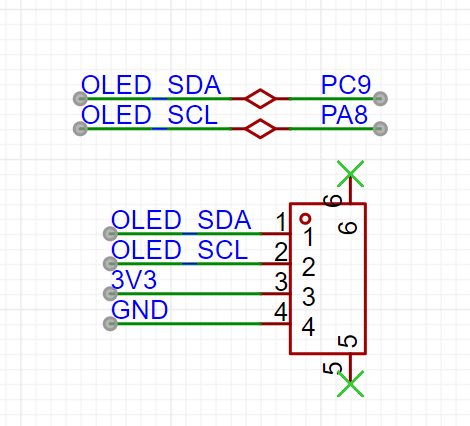
OLED
- 通讯控制
| 通讯 | 功能 | 引脚 |
| —- | —- | —- |
| SCL | I2C2 |
PC9| | SDA | |PA8|
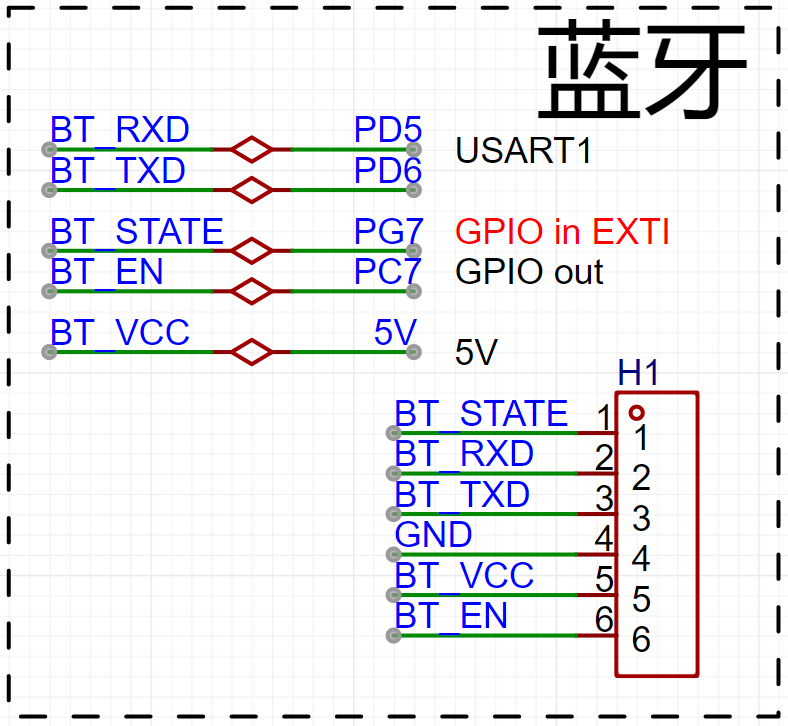
蓝牙
通讯控制 | 通讯 | 功能 | 引脚 | | —- | —- | —- | | TX | USART1 |
PD5| | RX | |PD6|蓝牙状态反馈
普通IO输入即可。可以考虑到外部中断,此处IO选择PG7,实际设计根据具体情况而定。
- 蓝牙开关控制
普通IO输出即可。此处采用PC7,实际设计根据具体情况而定。
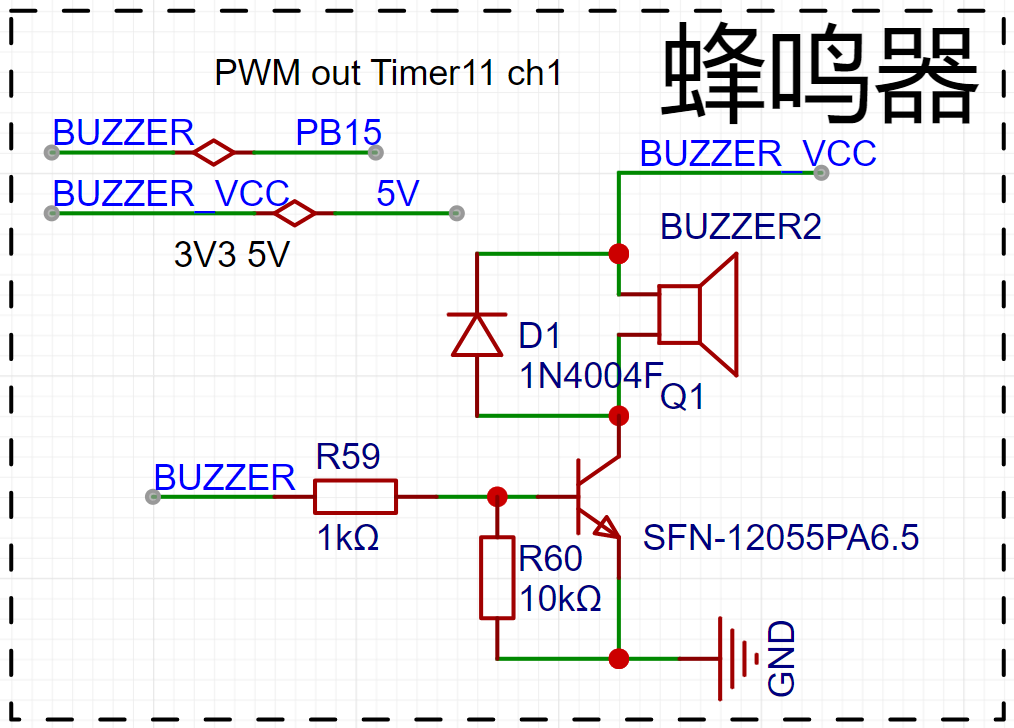
蜂鸣器
- 声音控制
pwm或者非pwm,可以进行无源和有源蜂鸣器选择。此处采用PB15,可以是普通IO,也可以是pwm控制的IO。Timer11``ch1
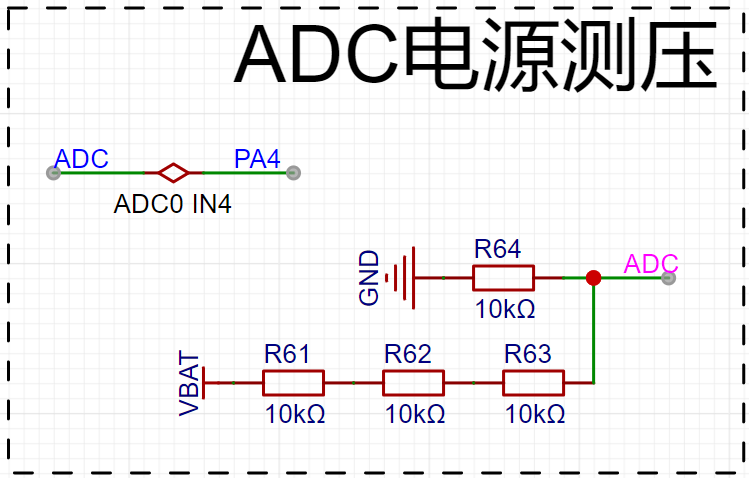
ADC电压采样
普通IO输入即可。可以考虑到外部中断,此处IO选择PF9和PC13,实际设计根据具体情况而定。
完整原理图

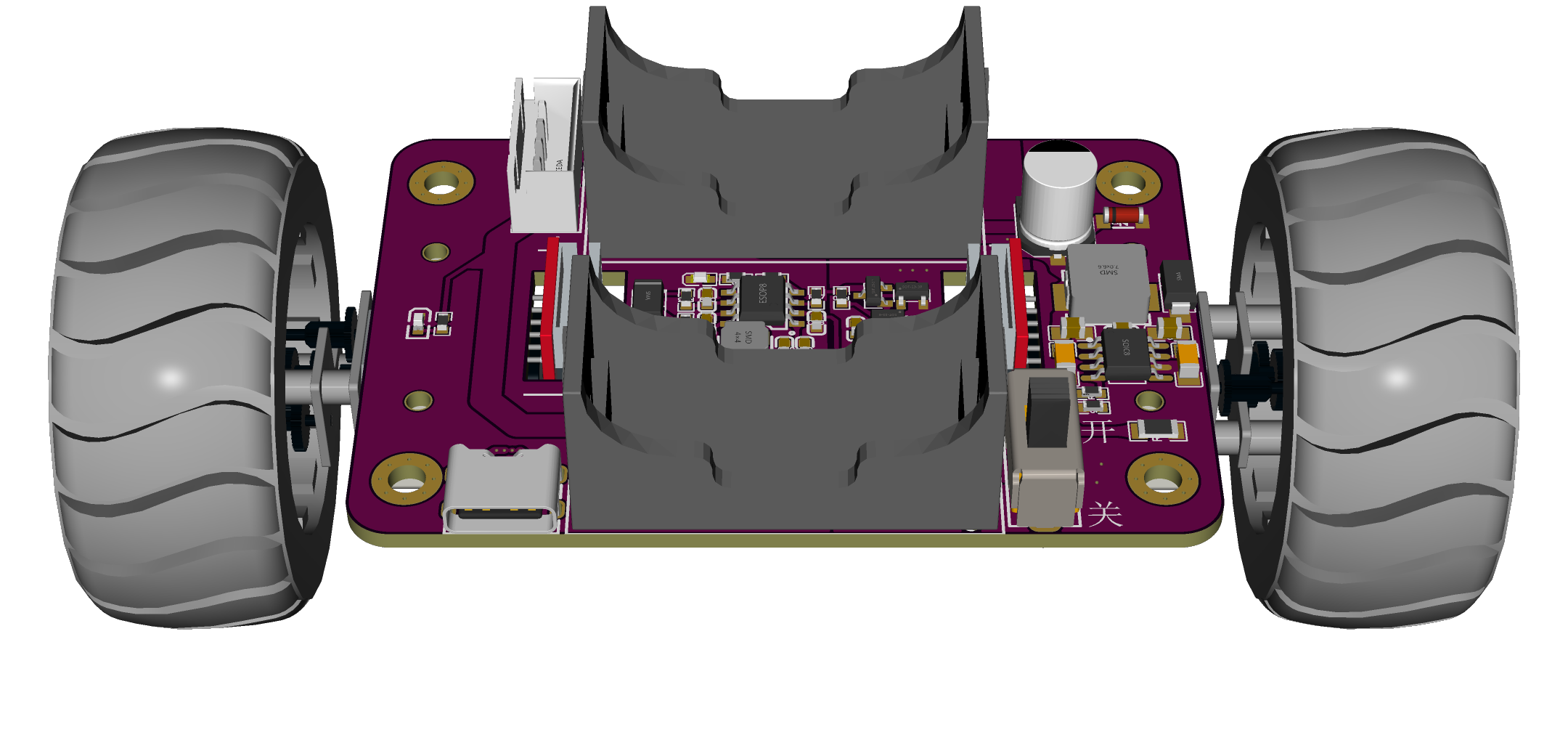
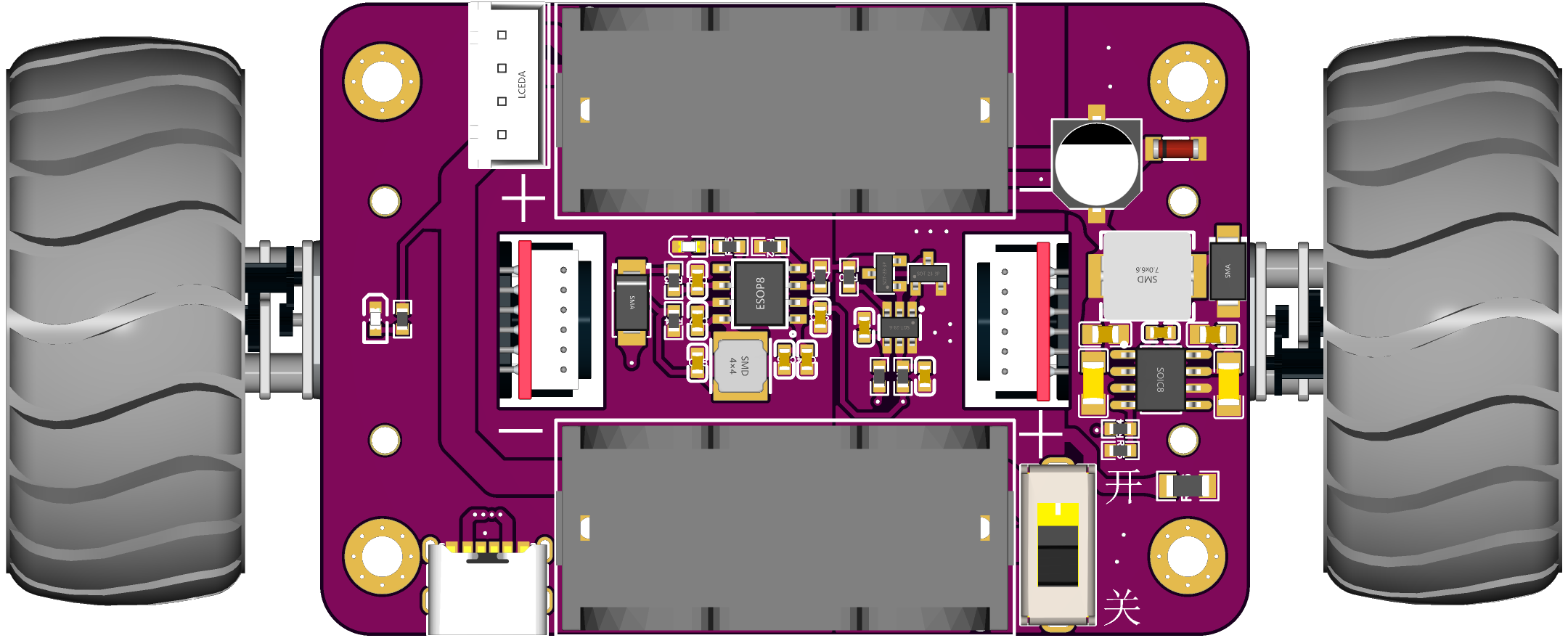
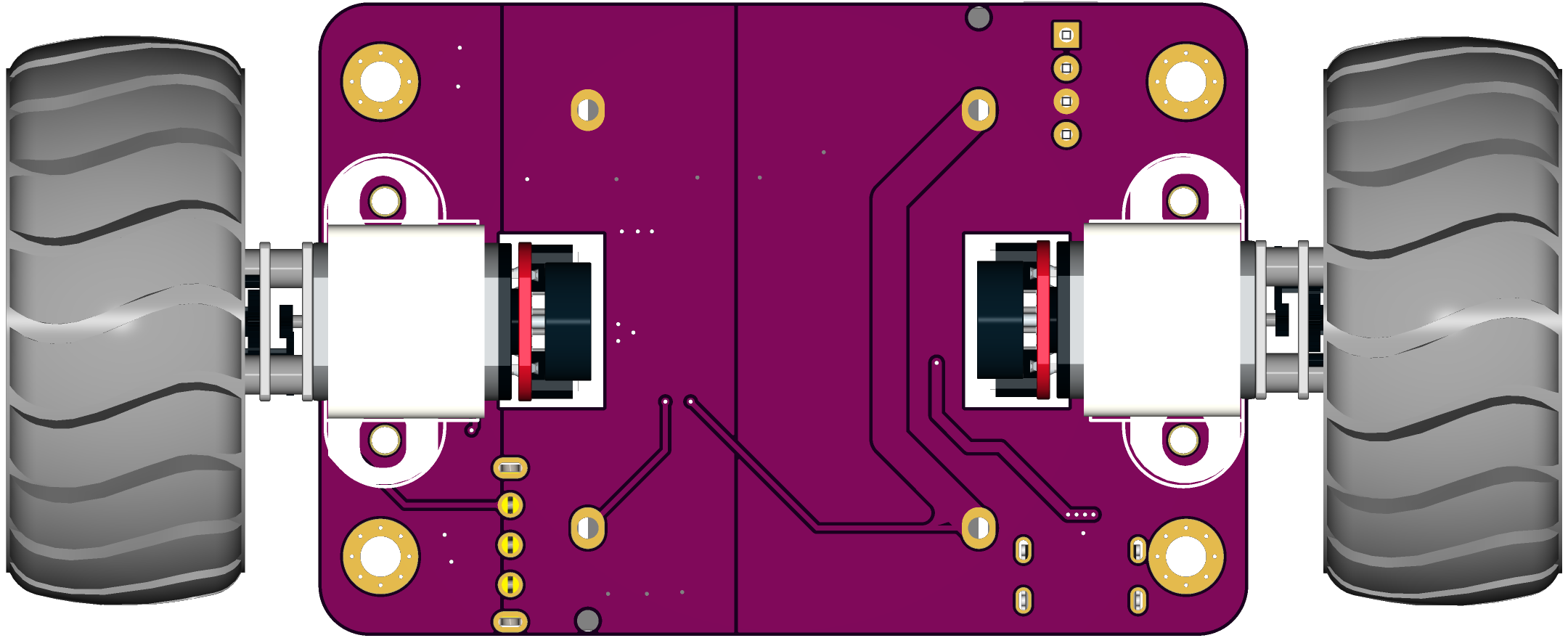
成品效果

若有收获,就点个赞吧
0 人点赞
