学习目标
- 理解中断概念
- 了解FreeRTOS的中断优先级
-
学习内容
中断概念
中断是计算机系统中一种重要的事件驱动机制,用于在特定条件下打断正在执行的程序,并跳转到预定义的中断处理程序中执行特定的操作。当发生中断时,处理器会立即中止当前正在执行的指令,保存当前的执行状态,并执行相应的中断处理程序。
中断可以由多种事件触发,例如硬件设备的状态改变、定时器溢出、外部信号等。常见的中断事件包括键盘输入、鼠标移动、网络数据到达等。
中断的作用是实现对实时事件的及时响应。通过中断,计算机系统能够在发生特定事件时立即中断当前任务,执行与该事件相关的处理程序,以确保及时处理和响应事件。中断能够提高系统的实时性、可靠性和可处理性。
中断的处理过程包括以下步骤: 中断触发:某个事件触发中断,如硬件设备发出中断请求信号。
- 中断响应:处理器检测到中断请求,并立即中止当前执行的指令。
- 保存现场:处理器保存当前的执行状态(如程序计数器、寄存器等),以便在中断处理完成后能够恢复执行。
- 中断服务程序执行:处理器跳转到预定义的中断服务程序(ISR),执行与中断相关的操作。
- 中断处理完成:中断服务程序执行完成后,处理器恢复之前保存的执行状态,并继续执行原来的程序。
通过合理使用中断,可以实现并发处理、异步事件处理和实时响应,提高系统的性能和可靠性。中断在各种计算机系统中广泛应用,包括嵌入式系统、操作系统和实时系统等。
ARM中的中断优先级
ARM Cortex-M 使用了 8 位宽的寄存器来配置中断的优先等级,这个寄存器就是中断优先级配置寄存器。
GD32中,分为抢占优先级和子优先级。
| 分组 | 抢占优先级 | 响应优先级 |
|---|---|---|
| 分组0 | 0(可取值为0) | 4(可取值为0到15) |
| 分组1 | 1(可取值为0到1) | 3(可取值为0到7) |
| 分组2 | 2(可取值为0到3) | 2(可取值为0到3) |
| 分组3 | 3(可取值为0到7) | 1(可取值为0到1) |
| 分组4 | 4(可取值为0到15) | 0(可取值为0) |
通常我们在代码中来进行配置:
nvic_priority_group_set(NVIC_PRIGROUP_PRE0_SUB4);
全局中断的意思是,把全局的中断优先级大概定义到一个区间,具体到哪种类型的中断,自行去配置合适的优先级。因此,我们对于一些中断源可以通过以下代码来配置优先级:
nvic_irq_enable(xxx_irqn, 0, 0);
上面中的全局中断配置,配置为抢占优先级为4,响应优先级为0,那么就把具体中断源的区间给框定了。抢占优先级取值介于0到15,响应优先级只能为0。因此,上面配置具体中断源优先级为5和0,在全局中断源的范畴内。当然你设置一个范围不在范畴内,是不生效,或者会出现其他问题。
FreeRTOS的中断优先级
在FreeRTOSConfig.h中,configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY配置了中断优先级:
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
默认位置为5。
在GD32中,优先级的数值越小,优先级越高。通过优先级分组可以知道,优先级分为0到15个等级。那么FreeRTOS中的这个优先级是什么含义呢?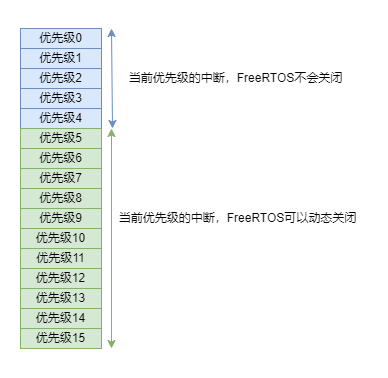
开启中断和关闭中断:
portENABLE_INTERRUPTS();portDISABLE_INTERRUPTS();
示例
- 创建timer中断,每秒打印数据
- 创建任务,用来扫描按键事件,当按键按下,关闭所有中断,当按键再次按下,开启中断
- 观察效果
```c
include “gd32f4xx.h”
include “systick.h”
include
include “main.h”
include “FreeRTOS.h”
include “task.h”
include “usart0.h”
TaskHandle_t start_handler; TaskHandle_t task_key_handler;
void task_key(void *pvParameters) { uint32_t flag = 0; FlagStatus pre_state = RESET; while(1) { FlagStatus state = gpio_input_bit_get(GPIOA, GPIO_PIN_0); if(SET == state && pre_state == RESET) { // 当前高电平, 上一次为低电平,按下 pre_state = state; if(flag == 0) { printf(“disable \r\n”); // 关闭中断 portDISABLE_INTERRUPTS(); } else if(flag == 1) { // 开启中断 printf(“enable \r\n”); portENABLE_INTERRUPTS(); } flag++; if(flag > 1) flag = 0; } else if(RESET == state && pre_state == SET) { // 当前高电平, 上一次为低电平,抬起 pre_state = state; } delay_1ms(20); } }
void Usart0_recv(uint8_t *data, uint32_t len) { printf(“recv: %s\r\n”, data); }
void start_task(void *pvParameters) { taskENTER_CRITICAL();
xTaskCreate(task_key, "task_key", 64, NULL, 2, &task_key_handler);vTaskDelete(start_handler);taskEXIT_CRITICAL();
}
static void GPIO_config() { // 时钟初始化 rcu_periph_clock_enable(RCU_GPIOA); // 配置GPIO模式 gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_PULLDOWN, GPIO_PIN_0); }
static void TIMER_config() { // 时钟配置 rcu_periph_clock_enable(RCU_TIMER5);
// 复位定时器timer_deinit(TIMER5);// rcu_timer_clock_prescaler_config(RCU_TIMER_PSC_MUL4);timer_parameter_struct tps;timer_struct_para_init(&tps);tps.prescaler = 10000 - 1; // 分频系数 240 000 000tps.period = SystemCoreClock / 10000 - 1; // 周期timer_init(TIMER5, &tps);nvic_irq_enable(TIMER5_DAC_IRQn, 5, 0);timer_interrupt_enable(TIMER5, TIMER_INT_UP);timer_enable(TIMER5);
}
void TIMER5_DAC_IRQHandler(void) { if(SET == timer_interrupt_flag_get(TIMER5, TIMER_INT_UP)) { printf(“timer\r\n”); }
//清除中断标志位timer_interrupt_flag_clear(TIMER5,TIMER_INT_FLAG_UP);
}
int main(void) { NVIC_SetPriorityGrouping(NVIC_PRIGROUP_PRE4_SUB0); systick_config(); GPIO_config(); Usart0_init(); TIMER_config();
printf("start\r\n");xTaskCreate(start_task, "start_task", 128, NULL, 1, &start_handler);vTaskStartScheduler();while(1) {}
}
练习题
- 动态修改串口中断的开和关。

若有收获,就点个赞吧
0 人点赞
