- 学习目标
- 学习内容
- include “gd32f4xx.h”
- include “systick.h”
- include
- include “main.h”
- include “FreeRTOS.h”
- include “task.h”
- include “semphr.h”
- include “Usart0.h”
- include “gd32f4xx.h”
- include “systick.h”
- include
- include “main.h”
- include “FreeRTOS.h”
- include “task.h”
- include “semphr.h”
- include “Usart0.h”
- include “gd32f4xx.h”
- include “systick.h”
- include
- include “main.h”
- include “FreeRTOS.h”
- include “task.h”
- include “semphr.h”
- include “Usart0.h”
- 练习题
学习目标
- 理解信号量的概念
- 掌握信号量发流程
- 掌握二进制信号量
- 熟悉计数型信号量
- 掌握互斥信号量
-
学习内容
概念
在 FreeRTOS 中,信号量(Semaphore)是一种用于实现任务之间同步和资源共享的机制。它是一种计数型的同步原语,用于控制对共享资源的访问和保护。
在FreeRTOS中,包含4种类型的信号量: 二进制信号量(Binary Semaphore):
二进制信号量是最基本的信号量类型。它的计数值要么为0(表示信号量已被获取),要么为1(表示信号量可用)。二进制信号量常用于实现互斥访问共享资源的场景,只允许一个任务访问资源。
在 FreeRTOS 中,你可以使用 xSemaphoreCreateBinary() 函数创建一个二进制信号量。任务可以通过 xSemaphoreTake() 函数获取信号量,通过 xSemaphoreGive() 函数释放信号量。
- 计数型信号量(Counting Semaphore):
计数型信号量允许指定初始计数值,并支持多个任务同时获取信号量。计数型信号量的计数值表示可用的资源数量。
在 FreeRTOS 中,你可以使用 xSemaphoreCreateCounting() 函数创建一个计数型信号量。任务可以使用 xSemaphoreTake() 函数获取信号量,使用 xSemaphoreGive() 函数释放信号量。
- 互斥信号量(Mutex Semaphore):
互斥信号量也用于实现资源的互斥访问,类似于二进制信号量。但与二进制信号量不同的是,互斥信号量允许同一个任务多次获取信号量,而不会导致死锁。在任务持有互斥信号量时,其他任务无法获取该信号量,必须等待该任务释放信号量。
在 FreeRTOS 中,你可以使用 xSemaphoreCreateMutex() 函数创建一个互斥信号量。任务可以使用 xSemaphoreTake()函数获取信号量,使用 xSemaphoreGive() 函数释放信号量。
- 递归互斥信号量(Recursive Mutex Semaphore):
递归互斥信号量是一种特殊的信号量类型,用于解决任务在嵌套调用中对资源的重复获取。它允许同一个任务多次获取信号量而不会导致死锁。
在 FreeRTOS 中,你可以使用 xSemaphoreCreateRecursiveMutex() 函数创建一个递归互斥信号量。任务可以使用 xSemaphoreTakeRecursive() 函数多次获取信号量,并使用 xSemaphoreGiveRecursive() 函数相应地释放信号量。
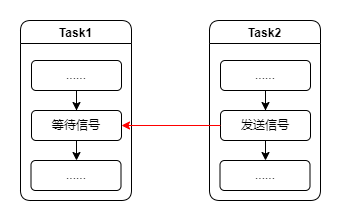
开发流程
- 创建信号量
- 开启一个任务,用来等待信号量
- 开启一个任务,用来发送信号量
二进制信号量
| 功能 | 描述 |
|---|---|
| xSemaphoreCreateBinary | 创建二进制信号量 |
| xSemaphoreTake | 等待信号 |
| xSemaphoreGive | 发送信号 |
信号量的创建
SemaphoreHandle_t xSemaphoreCreateBinary();
返回值为信号量的句柄。
等待信号操作
BaseType_t xSemaphoreTake(SemaphoreHandle_t xSemaphore, TickType_t xBlockTime );
SemaphoreHandle_t xSemaphore表示要等待的哪个信号量句柄。TickType_t xBlockTime表示要等待的时间。通常我们一直等到有信号到来,这里我们可以填写portMAX_DELAY- 返回值类型为
BaseType_t,表示成功或者失败,取值为pdPASS和pdFAIL
发送信号操作
BaseType_t xSemaphoreGive(SemaphoreHandle_t xSemaphore);
SemaphoreHandle_t xSemaphore表示要等待的哪个信号量句柄。- 返回值类型为
BaseType_t,表示成功或者失败,取值为pdPASS和pdFAIL
案例一
- 开启两个任务,分别去等待信号。
- 开启按键扫描任务,当点击按键时,发送信号
```c
include “gd32f4xx.h”
include “systick.h”
include
include “main.h”
include “FreeRTOS.h”
include “task.h”
include “semphr.h”
include “Usart0.h”
TaskHandle_t task_handler; TaskHandle_t task_key_handler; TaskHandle_t task1_handler; TaskHandle_t task2_handler; SemaphoreHandle_t sema_handler;
void task1(void *pvParameters) { BaseType_t result; while(1) { result = xSemaphoreTake(sema_handler, portMAX_DELAY); if(result == pdTRUE) { printf(“task1\n”); } else { printf(“task1 Error\n”); } } }
void task2(void *pvParameters) { BaseType_t result; while(1) { result = xSemaphoreTake(sema_handler, portMAX_DELAY); if(result == pdTRUE) { printf(“task2\n”); } else { printf(“task2 Error\n”); } } }
void task_key(void *pvParameters) { FlagStatus pre_state = RESET; BaseType_t result; while(1) { FlagStatus state = gpio_input_bit_get(GPIOA, GPIO_PIN_0); if(SET == state && pre_state == RESET) { // 当前高电平, 上一次为低电平,按下 pre_state = state;
result = xSemaphoreGive(sema_handler);} else if(RESET == state && pre_state == SET) {// 当前高电平, 上一次为低电平,抬起pre_state = state;}vTaskDelay(20);}
}
void start_task(void *pvParameters) { taskENTER_CRITICAL();
xTaskCreate(task_key, "task_key", 64, NULL, 2, &task_key_handler);xTaskCreate(task1, "task1", 64, NULL, 3, &task1_handler);xTaskCreate(task2, "task2", 64, NULL, 2, &task2_handler);vTaskDelete(task_handler);taskEXIT_CRITICAL();
}
void Usart0_recv(uint8_t *data, uint32_t len) { printf(“recv: %s\n”, data); }
static void GPIO_config() { // 时钟初始化 rcu_periph_clock_enable(RCU_GPIOA); // 配置GPIO模式 gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_PULLDOWN, GPIO_PIN_0); }
int main(void) { NVIC_SetPriorityGrouping(NVIC_PRIGROUP_PRE4_SUB0); systick_config(); GPIO_config(); Usart0_init();
sema_handler = xSemaphoreCreateBinary();xTaskCreate(start_task, "start_task", 128, NULL, 1, &task_handler);vTaskStartScheduler();while(1) {}
}
观察,两个任务是否获得信号。<br />改变两个任务的优先级,观察两个任务信号的获取情况。<a name="EMQHj"></a>#### 案例二在案例1的基础上,通过串口接收,来发送信号。```cvoid Usart0_recv(uint8_t *data, uint32_t len){printf("recv: %s\n", data);xSemaphoreGiveFromISR(sema_handler, NULL);}
计数型信号量
| 功能 | 描述 |
|---|---|
| xSemaphoreCreateCounting | 创建计数型信号量 |
| xSemaphoreTake | 等待信号 |
| xSemaphoreGive | 发送信号 |
信号量的创建
SemaphoreHandle_t xSemaphoreCreateCounting( const UBaseType_t uxMaxCount,const UBaseType_t uxInitialCount);
参数说明:
const UBaseType_t uxMaxCount最大计数值。const UBaseType_t uxInitialCount初始化当前计数值。
返回值为信号量的句柄。
等待信号操作
BaseType_t xSemaphoreTake(SemaphoreHandle_t xSemaphore, TickType_t xBlockTime );
SemaphoreHandle_t xSemaphore表示要等待的哪个信号量句柄。TickType_t xBlockTime表示要等待的时间。通常我们一直等到有信号到来,这里我们可以填写portMAX_DELAY- 返回值类型为
BaseType_t,表示成功或者失败,取值为pdPASS和pdFAIL
发送信号操作
BaseType_t xSemaphoreGive(SemaphoreHandle_t xSemaphore);
SemaphoreHandle_t xSemaphore表示要等待的哪个信号量句柄。- 返回值类型为
BaseType_t,表示成功或者失败,取值为pdPASS和pdFAIL
案例一
- 开启两个任务,等待信号,接收到信号后,处理耗时操作
- 开启按键扫描,点击按键时发送信号
```c
include “gd32f4xx.h”
include “systick.h”
include
include “main.h”
include “FreeRTOS.h”
include “task.h”
include “semphr.h”
include “Usart0.h”
TaskHandle_t task_handler; TaskHandle_t task_key_handler; TaskHandle_t task1_handler; TaskHandle_t task2_handler; SemaphoreHandle_t sema_handler;
void task1(void *pvParameters) { BaseType_t result; while(1) { result = xSemaphoreTake(sema_handler, portMAX_DELAY); if(result == pdTRUE) { printf(“task1 %ld\n”, uxSemaphoreGetCount(sema_handler)); } else { printf(“task1 Error\n”); } vTaskDelay(2500); } }
void task2(void *pvParameters) { BaseType_t result; while(1) { result = xSemaphoreTake(sema_handler, portMAX_DELAY); if(result == pdTRUE) { printf(“task2 %ld\n”, uxSemaphoreGetCount(sema_handler)); } else { printf(“task2 Error\n”); } vTaskDelay(2500); } }
void task_key(void *pvParameters) { FlagStatus pre_state = RESET; BaseType_t result; while(1) { FlagStatus state = gpio_input_bit_get(GPIOA, GPIO_PIN_0); if(SET == state && pre_state == RESET) { // 当前高电平, 上一次为低电平,按下 pre_state = state;
result = xSemaphoreGive(sema_handler);
// if(result == pdTRUE) { // printf(“semaphore give success\n”); // } else { // printf(“semaphore give error\n”); // } } else if(RESET == state && pre_state == SET) { // 当前高电平, 上一次为低电平,抬起 pre_state = state; } vTaskDelay(20); } }
void start_task(void *pvParameters) { taskENTER_CRITICAL();
xTaskCreate(task_key, "task_key", 64, NULL, 2, &task_key_handler);xTaskCreate(task1, "task1", 64, NULL, 3, &task1_handler);xTaskCreate(task2, "task2", 64, NULL, 2, &task2_handler);vTaskDelete(task_handler);taskEXIT_CRITICAL();
}
void Usart0_recv(uint8_t *data, uint32_t len) { printf(“recv: %s\n”, data); }
static void GPIO_config() { // 时钟初始化 rcu_periph_clock_enable(RCU_GPIOA); // 配置GPIO模式 gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_PULLDOWN, GPIO_PIN_0); }
int main(void) { NVIC_SetPriorityGrouping(NVIC_PRIGROUP_PRE4_SUB0); systick_config(); GPIO_config(); Usart0_init();
sema_handler = xSemaphoreCreateCounting(100, 0);xTaskCreate(start_task, "start_task", 128, NULL, 1, &task_handler);vTaskStartScheduler();while(1) {}
}
观察,两个任务是否获得信号。<br />频繁点击按键,观察效果。<a name="SjfQh"></a>#### 案例二在案例1的基础上,通过串口接收,来发送信号。```cvoid Usart0_recv(uint8_t *data, uint32_t len){printf("recv: %s\n", data);xSemaphoreGiveFromISR(sema_handler, NULL);}
xSemaphoreGiveFromISR中断中发送信号
互斥信号量
| 功能 | 描述 |
|---|---|
| xSemaphoreCreateMutex | 创建互斥信号量 |
| xSemaphoreTake | 等待信号 |
| xSemaphoreGive | 发送信号 |
信号量的创建
SemaphoreHandle_t xSemaphoreCreateMutex();
返回值为信号量的句柄。
等待信号操作
BaseType_t xSemaphoreTake(SemaphoreHandle_t xSemaphore, TickType_t xBlockTime );
SemaphoreHandle_t xSemaphore表示要等待的哪个信号量句柄。TickType_t xBlockTime表示要等待的时间。通常我们一直等到有信号到来,这里我们可以填写portMAX_DELAY- 返回值类型为
BaseType_t,表示成功或者失败,取值为pdPASS和pdFAIL
发送信号操作
BaseType_t xSemaphoreGive(SemaphoreHandle_t xSemaphore);
SemaphoreHandle_t xSemaphore表示要等待的哪个信号量句柄。- 返回值类型为
BaseType_t,表示成功或者失败,取值为pdPASS和pdFAIL案例一
开启两个任务,同时等待和发送信号,观察任务调用 ```cinclude “gd32f4xx.h”
include “systick.h”
include
include “main.h”
include “FreeRTOS.h”
include “task.h”
include “semphr.h”
include “Usart0.h”
TaskHandle_t task_handler; TaskHandle_t task1_handler; TaskHandle_t task2_handler; SemaphoreHandle_t sema_handler;
void task1(void *pvParameters) { BaseType_t result; while(1) { result = xSemaphoreTake(sema_handler, portMAX_DELAY); if(result == pdTRUE) { printf(“task1\n”); } else { printf(“task1 Error\n”); } xSemaphoreGive(sema_handler); vTaskDelay(2000); } }
void task2(void *pvParameters) { BaseType_t result; while(1) { result = xSemaphoreTake(sema_handler, portMAX_DELAY); if(result == pdTRUE) { printf(“task2\n”); } else { printf(“task2 Error\n”); } xSemaphoreGive(sema_handler); vTaskDelay(2000); } }
void start_task(void *pvParameters) { taskENTER_CRITICAL();
xTaskCreate(task1, "task1", 64, NULL, 2, &task1_handler);xTaskCreate(task2, "task2", 64, NULL, 2, &task2_handler);vTaskDelete(task_handler);taskEXIT_CRITICAL();
}
void Usart0_recv(uint8_t *data, uint32_t len) { printf(“recv: %s\n”, data); }
int main(void) { NVIC_SetPriorityGrouping(NVIC_PRIGROUP_PRE4_SUB0); systick_config(); Usart0_init();
sema_handler = xSemaphoreCreateMutex();xTaskCreate(start_task, "start_task", 128, NULL, 1, &task_handler);vTaskStartScheduler();while(1) {}
}
<a name="D5QKT"></a>### 递归互斥信号量| 功能 | 描述 || --- | --- || xSemaphoreCreateRecursiveMutex | 创建递归互斥信号量 || xSemaphoreTakeRecursive | 等待信号 || xSemaphoreGiveRecursive | 发送信号 |信号量的创建```cSemaphoreHandle_t xSemaphoreCreateRecursiveMutex();
返回值为信号量的句柄。
等待信号操作
BaseType_t xSemaphoreTakeRecursive(SemaphoreHandle_t xSemaphore, TickType_t xBlockTime );
SemaphoreHandle_t xSemaphore表示要等待的哪个信号量句柄。TickType_t xBlockTime表示要等待的时间。通常我们一直等到有信号到来,这里我们可以填写portMAX_DELAY- 返回值类型为
BaseType_t,表示成功或者失败,取值为pdPASS和pdFAIL
发送信号操作
BaseType_t xSemaphoreGiveRecursive(SemaphoreHandle_t xSemaphore);
SemaphoreHandle_t xSemaphore表示要等待的哪个信号量句柄。- 返回值类型为
BaseType_t,表示成功或者失败,取值为pdPASS和pdFAIL
示例代码:
#include "gd32f4xx.h"#include "systick.h"#include <stdio.h>#include "main.h"#include "FreeRTOS.h"#include "task.h"#include "semphr.h"#include "Usart0.h"TaskHandle_t task_Handler;TaskHandle_t task1_Handler;TaskHandle_t task2_Handler;SemaphoreHandle_t sema_handler;void task1(void *pvParameters) {BaseType_t result;while(1) {printf("task1 take 0\n");xSemaphoreTakeRecursive(sema_handler, portMAX_DELAY);printf("task1 take 1\n");xSemaphoreTakeRecursive(sema_handler, portMAX_DELAY);printf("task1 give\n");xSemaphoreGiveRecursive(sema_handler);vTaskDelay(1000);}}void task2(void *pvParameters) {BaseType_t result;while(1) {printf("task2 take 0\n");xSemaphoreTakeRecursive(sema_handler, portMAX_DELAY);printf("task2 take 1\n");xSemaphoreTakeRecursive(sema_handler, portMAX_DELAY);printf("task2 give\n");xSemaphoreGiveRecursive(sema_handler);vTaskDelay(1000);}}void start_task(void *pvParameters) {taskENTER_CRITICAL();xTaskCreate(task1, "task1", 128, NULL, 2, &task1_Handler);xTaskCreate(task2, "task2", 128, NULL, 2, &task2_Handler);vTaskDelete(task_Handler);taskEXIT_CRITICAL();}void Usart0_recv(uint8_t *data, uint32_t len){printf("recv: %s\n", data);}static void GPIO_config() {// 时钟初始化rcu_periph_clock_enable(RCU_GPIOA);// 配置GPIO模式gpio_mode_set(GPIOA, GPIO_MODE_INPUT, GPIO_PUPD_PULLDOWN, GPIO_PIN_0);}int main(void){systick_config();GPIO_config();Usart0_init();sema_handler = xSemaphoreCreateRecursiveMutex();if(sema_handler == NULL) {printf("create error\r\n");}xTaskCreate(start_task, "start_task", 128, NULL, 1, &task_Handler);vTaskStartScheduler();while(1) {}}
比较
四种信号量类型的常见应用场景的比较:
- 二进制信号量:
应用场景:二进制信号量适用于任务间的互斥、同步和事件通知。例如,当多个任务需要共享一个资源时,可以使用二进制信号量来保证同一时间只有一个任务访问该资源。
示例应用:多个任务竞争访问共享打印机资源。
- 计数信号量:
应用场景:计数信号量适用于任务间的资源共享和限制、任务同步和事件通知。它可以表示一组可用资源的数量,任务可以通过获取计数信号量来申请和释放这些资源。
示例应用:限制同时执行的任务数量、任务间的生产者-消费者模式。
- 互斥信号量:
应用场景:互斥信号量用于互斥访问共享资源的场景。它确保在任意给定时间只有一个任务可以访问共享资源,避免了数据竞争和不一致性。
示例应用:多个任务竞争访问共享数据结构、临界区保护。
- 递归互斥信号量:
应用场景:递归互斥信号量适用于同一任务需要多次获取互斥资源的场景。它允许同一任务在获取资源后再次获取,而不会引起死锁。
示例应用:任务递归调用、嵌套临界区保护。
需要根据具体的应用需求选择合适的信号量类型。如果需要简单的互斥访问,互斥信号量可能是最合适的选择。如果需要限制资源数量或任务同步,计数信号量可以派上用场。而对于同一任务需要多次获取资源的情况,递归互斥信号量提供了便利。
练习题
- 实现二进制信号量开发流程
- 实现计数型信号量开发流程
- 实现互斥型信号量开发流程
- 实现递归互斥信号量开发流程

若有收获,就点个赞吧
0 人点赞
