一、基础概念:
这一部分我们先来总结下RocketMQ的一些重要的基础概念:
1 消息模型(Message Model)
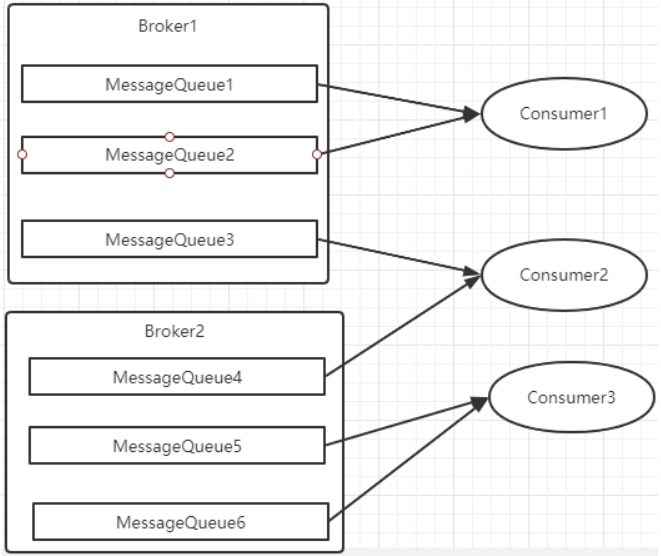
RocketMQ主要由 Producer、Broker、Consumer 三部分组成,其中Producer 负责生产消息,Consumer 负责消费消息,Broker 负责存储消息。Broker 在实际部署过程中对应一台服务器,每个 Broker 可以存储多个Topic的消息,每个Topic的消息也可以分片存储于不同的 Broker。Message Queue 用于存储消息的物理地址,每个Topic中的消息地址存储于多个 Message Queue 中。ConsumerGroup 由多个Consumer 实例构成。
2 消息生产者(Producer)
负责生产消息,一般由业务系统负责生产消息。一个消息生产者会把业务应用系统里产生的消息发送到broker服务器。RocketMQ提供多种发送方式,同步发送、异步发送、顺序发送、单向发送。同步和异步方式均需要Broker返回确认信息,单向发送不需要。
生产者中,会把同一类Producer组成一个集合,叫做生产者组,这类Producer发送同一类消息且发送逻辑一致。如果发送的是事务消息且原始生产者在发送之后崩溃,则Broker服务器会联系同一生产者组的其他生产者实例以提交或回溯消费。
3 消息消费者(Consumer)
负责消费消息,一般是后台系统负责异步消费。一个消息消费者会从Broker服务器拉取消息、并将其提供给应用程序。从用户应用的角度而言提供了两种消费形式:拉取式消费、推动式消费。
- 拉取式消费的应用通常主动调用Consumer的拉消息方法从Broker服务器拉消息、主动权由应用控制。一旦获取了批量消息,应用就会启动消费过程。
- 推动式消费模式下Broker收到数据后会主动推送给消费端,该消费模式一般实时性较高。
消费者同样会把同一类Consumer组成一个集合,叫做消费者组,这类Consumer通常消费同一类消息且消费逻辑一致。消费者组使得在消息消费方面,实现负载均衡和容错的目标变得非常容易。要注意的是,消费者组的消费者实例必须订阅完全相同的Topic。RocketMQ 支持两种消息模式:集群消费(Clustering)和广播消费(Broadcasting)。
- 集群消费模式下,相同Consumer Group的每个Consumer实例平均分摊消息。
广播消费模式下,相同Consumer Group的每个Consumer实例都接收全量的消息。
4 主题(Topic)
表示一类消息的集合,每个主题包含若干条消息,每条消息只能属于一个主题,是RocketMQ进行消息订阅的基本单位。
同一个Topic下的数据,会分片保存到不同的Broker上,而每一个分片单位,就叫做MessageQueue。MessageQueue是生产者发送消息与消费者消费消息的最小单位。5 代理服务器(Broker Server)
消息中转角色,负责存储消息、转发消息。代理服务器在RocketMQ系统中负责接收从生产者发送来的消息并存储、同时为消费者的拉取请求作准备。代理服务器也存储消息相关的元数据,包括消费者组、消费进度偏移和主题和队列消息等。
Broker Server是RocketMQ真正的业务核心,包含了多个重要的子模块:Remoting Module:整个Broker的实体,负责处理来自clients端的请求。
- Client Manager:负责管理客户端(Producer/Consumer)和维护Consumer的Topic订阅信息
- Store Service:提供方便简单的API接口处理消息存储到物理硬盘和查询功能。
- HA Service:高可用服务,提供Master Broker 和 Slave Broker之间的数据同步功能。
- Index Service:根据特定的Message key对投递到Broker的消息进行索引服务,以提供消息的快速查询。
而Broker Server要保证高可用需要搭建主从集群架构。RocketMQ中有两种Broker架构模式:
- 普通集群:
这种集群模式下会给每个节点分配一个固定的角色,master负责响应客户端的请求,并存储消息。slave则只负责对master的消息进行同步保存,并响应部分客户端的读请求。消息同步方式分为同步同步和异步同步。
这种集群模式下各个节点的角色无法进行切换,也就是说,master节点挂了,这一组Broker就不可用了。
- Dledger高可用集群:
Dledger是RocketMQ自4.5版本引入的实现高可用集群的一项技术。这个模式下的集群会随机选出一个节点作为master,而当master节点挂了后,会从slave中自动选出一个节点升级成为master。
Dledger技术做的事情:1、接管Broker的CommitLog消息存储 2、从集群中选举出master节点 3、完成master节点往slave节点的消息同步。
Dledger的关键部分是在他的节点选举上。Dledger是使用Raft算法来进行节点选举的。这里简单介绍下Raft算法的选举过程:
首先:每个节点有三个状态,Leader,follower和candidate(候选人)。正常运行的情况下,集群中会有一个leader,其他都是follower,follower只响应Leader和Candidate的请求,而客户端的请求全部由Leader处理,即使有客户端请求到了一个follower,也会将请求转发到leader。
集群刚启动时,每个节点都是follower状态,之后集群内部会发送一个timeout信号,所有follower就转成candidate去拉取选票,获得大多数选票的节点选为leader,其他候选人转为follower。如果一个timeout信号发出时,没有选出leader,将会重新开始一次新的选举。而Leader节点会往其他节点发送心跳信号,确认他的leader状态。
— 然后会启动定时器,如果在指定时间内没有收到Leader的心跳,就会转为Candidate状态,然后向其他成员发起投票请求,如果收到半数以上成员的投票,则Candidate会晋升为Leader。然后leader也有可能会退化成follower。
然后,在Raft协议中,会将时间分为一些任意时间长度的时间片段,叫做term。term会使用一个全局唯一,连续递增的编号作为标识,也就是起到了一个逻辑时钟的作用。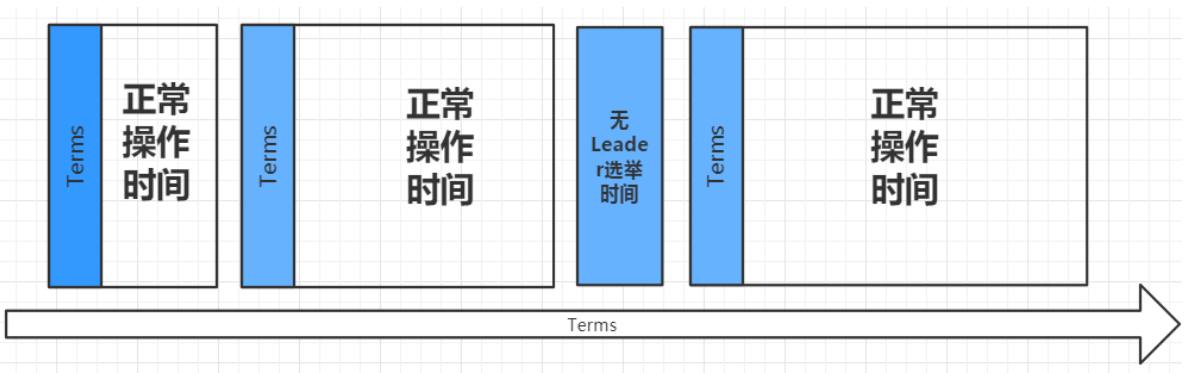
在每一个term时间片里,都会进行新的选举,每一个Candidate都会努力争取成为leader。获得票数最多的节点就会被选举为Leader。被选为Leader的这个节点,在一个term时间片里就会保持leader状态。这样,就会保证在同一时间段内,集群中只会有一个Leader。在某些情况下,选票可能会被各个节点瓜分,形成不了多数派,那这个term可能直到结束都没有leader,直到下一个term再重新发起选举,这也就没有了Zookeeper中的脑裂问题。而在每次重新选举的过程中, leader也有可能会退化成为follower。也就是说,在这个集群中, leader节点是会不断变化的。
然后,每次选举的过程中,每个节点都会存储当前term编号,并在节点之间进行交流时,都会带上自己的term编号。如果一个节点发现他的编号比另外一个小,那么他就会将自己的编号更新为较大的那一个。而如果leader或者candidate发现自己的编号不是最新的,他就会自动转成follower。如果接收到的请求term编号小于自己的编号,term将会拒绝执行。
在选举过程中,Raft协议会通过心跳机制发起leader选举。节点都是从follower状态开始的,如果收到了来自leader或者candidate的心跳RPC请求,那他就会保持follower状态,避免争抢成为candidate。而leader会往其他节点发送心跳信号,来确认自己的地位。如果follower一段时间(两个timeout信号)内没有收到Leader的心跳信号,他就会认为leader挂了,发起新一轮选举。
选举开始后,每个follower会增加自己当前的term,并将自己转为candidate。然后向其他节点发起投票请求,请求时会带上自己的编号和term,也就是说都会默认投自己一票。之后candidate状态可能会发生以下三种变化:
- 赢得选举,成为leader: 如果它在一个term内收到了大多数的选票,将会在接下的剩余term时间内称为leader,然后就可以通过发送心跳确立自己的地位。(每一个server在一个term内只能投一张选票,并且按照先到先得的原则投出)
- 其他节点成为leader: 在等待投票时,可能会收到其他server发出心跳信号,说明其他leader已经产生了。这时通过比较自己的term编号和RPC过来的term编号,如果比对方大,说明leader的term过期了,就会拒绝该RPC,并继续保持候选人身份; 如果对方编号不比自己小,则承认对方的地位,转为follower。
- 选票被瓜分,选举失败: 如果没有candidate获取大多数选票, 则没有leader产生, candidate们等待超时后发起另一轮选举. 为了防止下一次选票还被瓜分,必须采取一些额外的措施, raft采用随机election timeout(随机休眠时间)的机制防止选票被持续瓜分。通过将timeout随机设为一段区间上的某个值, 因此很大概率会有某个candidate率先超时然后赢得大部分选票。
所以以三个节点的集群为例,选举过程会是这样的:
- 集群启动时,三个节点都是follower,发起投票后,三个节点都会给自己投票。这样一轮投票下来,三个节点的term都是1,是一样的,这样是选举不出Leader的。
- 当一轮投票选举不出Leader后,三个节点会进入随机休眠,例如A休眠1秒,B休眠3秒,C休眠2秒。
- 一秒后,A节点醒来,会把自己的term加一票,投为2。然后2秒时,C节点醒来,发现A的term已经是2,比自己的1大,就会承认A是Leader,把自己的term也更新为2。实际上这个时候,A已经获得了集群中的多数票,2票,A就会被选举成Leader。这样,一般经过很短的几轮选举,就会选举出一个Leader来。
- 到3秒时,B节点会醒来,他也同样会承认A的term最大,他是Leader,自己的term也会更新为2。这样集群中的所有Candidate就都确定成了leader和follower.
- 然后在一个任期内,A会不断发心跳给另外两个节点。当A挂了后,另外的节点没有收到A的心跳,就会都转化成Candidate状态,重新发起选举。
Dledger还会采用Raft协议进行多副本的消息同步:
简单来说,数据同步会通过两个阶段,一个是uncommitted阶段,一个是commited阶段。
Leader Broker上的Dledger收到一条数据后,会标记为uncommitted状态,然后他通过自己的DledgerServer组件把这个uncommitted数据发给Follower Broker的DledgerServer组件。
接着Follower Broker的DledgerServer收到uncommitted消息之后,必须返回一个ack给Leader Broker的Dledger。然后如果Leader Broker收到超过半数的Follower Broker返回的ack之后,就会把消息标记为committed状态。
再接下来, Leader Broker上的DledgerServer就会发送committed消息给Follower Broker上的DledgerServer,让他们把消息也标记为committed状态。这样,就基于Raft协议完成了两阶段的数据同步。
最后,关于Dledger以及Raft协议的更底层的详细资料,后续会有一个分布式一致性协议的专题,将会结合其他分布式一致性算法做统一讲解,这里就不深入展开了。
6 名字服务(Name Server)
名称服务充当路由消息的提供者。Broker Server会在启动时向所有的Name Server注册自己的服务信息,并且后续通过心跳请求的方式保证这个服务信息的实时性。生产者或消费者能够通过名字服务查找各主题相应的Broker IP列表。多个Namesrv实例组成集群,但相互独立,没有信息交换。
这种特性也就意味着NameServer中任意的节点挂了,只要有一台服务节点正常,整个路由服务就不会有影响。当然,这里不考虑节点的负载情况。
7 消息(Message)
消息系统所传输信息的物理载体,生产和消费数据的最小单位,每条消息必须属于一个主题Topic。RocketMQ中每个消息拥有唯一的Message ID,且可以携带具有业务标识的Key。系统提供了通过Message ID和Key查询消息的功能。
并且Message上有一个为消息设置的标志,Tag标签。用于同一主题下区分不同类型的消息。来自同一业务单元的消息,可以根据不同业务目的在同一主题下设置不同标签。标签能够有效地保持代码的清晰度和连贯性,并优化RocketMQ提供的查询系统。消费者可以根据Tag实现对不同子主题的不同消费逻辑,实现更好的扩展性。
关于Message的更详细字段,在源码的docs/cn/best_practice.md中有详细介绍。
二、消息存储
1、何时存储消息
分布式队列因为有高可靠性的要求,所以数据要进行持久化存储。
- MQ收到一条消息后,需要向生产者返回一个ACK响应,并将消息存储起来。
- MQ Push一条消息给消费者后,等待消费者的ACK响应,需要将消息标记为已消费。如果没有标记为消费,MQ会不断的尝试往消费者推送这条消息。
-
2、消息存储介质
RocketMQ采用的是类似于Kafka的文件存储机制,即直接用磁盘文件来保存消息,而不需要借助MySQL这一类索引工具。
2.1磁盘保存文件慢吗?
磁盘如果使用得当,磁盘的速度完全可以匹配上网络的数据传输速度。目前的高性能磁盘,顺序写速度可以达到600MB/s, 超过了一般网卡的传输速度。但是磁盘随机写的速度只有大概100KB/s,和顺序写的性能相差6000倍!因为有如此巨大的速度差别,好的消息队列系统会比普通的消息队列系统速度快多个数量级。RocketMQ的消息用顺序写,保证了消息存储的速度。
2.2零拷贝技术加速文件读写
Linux操作系统分为【用户态】和【内核态】,文件操作、网络操作需要涉及这两种形态的切换,免不了进行数据复制。
一台服务器 把本机磁盘文件的内容发送到客户端,一般分为两个步骤:
1)read;读取本地文件内容;
2)write;将读取的内容通过网络发送出去。
这两个看似简单的操作,实际进行了4 次数据复制,分别是: 从磁盘复制数据到内核态内存;
- 从内核态内存复制到用户态内存;
- 然后从用户态内存复制到网络驱动的内核态内存;
- 最后是从网络驱动的内核态内存复 制到网卡中进行传输。
而通过使用mmap的方式,可以省去向用户态的内存复制,提高速度。这种机制在Java中是通过NIO包中的MappedByteBuffer实现的。RocketMQ充分利用了上述特性,也就是所谓的“零拷贝”技术,提高消息存盘和网络发送的速度。
这里需要注意的是,采用MappedByteBuffer这种内存映射的方式有几个限制,其中之一是一次只能映射1.5~2G 的文件至用户态的虚拟内存,这也是为何RocketMQ默认设置单个CommitLog日志数据文件为1G的原因了
关于零拷贝,JAVA的NIO中提供了两种实现方式,mmap和sendfile,其中mmap适合比较小的文件,而sendfile适合传递比较大的文件。
3 消息存储结构
RocketMQ消息的存储分为三个部分:
- CommitLog:存储消息的元数据。所有消息都会顺序存入到CommitLog文件当中。CommitLog由多个文件组成,每个文件固定大小1G。以第一条消息的偏移量为文件名。
- ConsumerQueue:存储消息在CommitLog的索引。一个MessageQueue一个文件,记录当前MessageQueue被哪些消费者组消费到了哪一条CommitLog。
- IndexFile:为了消息查询提供了一种通过key或时间区间来查询消息的方法,这种通过IndexFile来查找消息的方法不影响发送与消费消息的主流程
整体的消息存储结构如下图: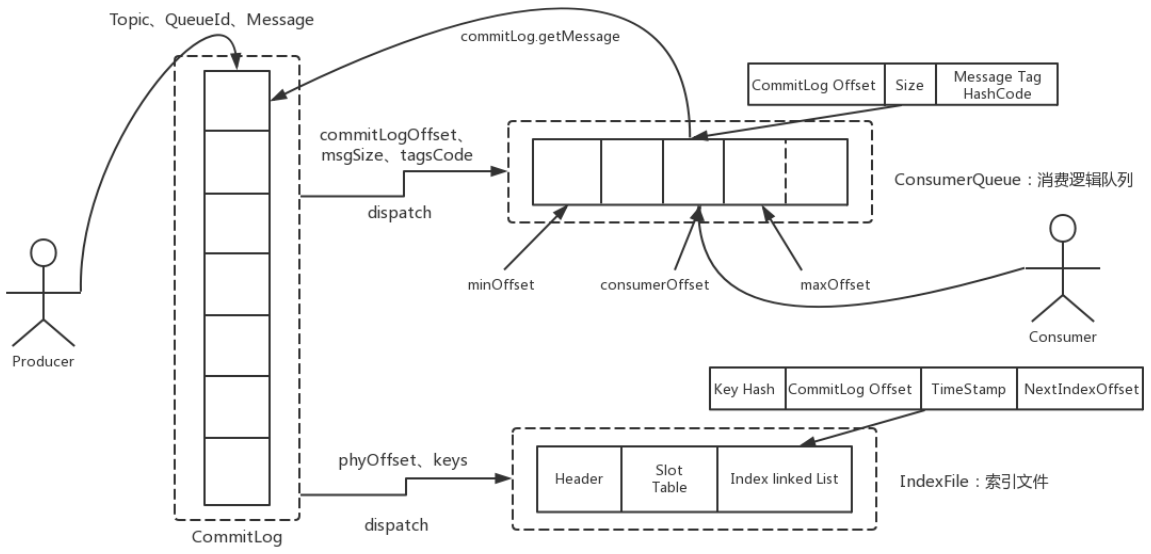
还记得我们在搭建集群时都特意指定的文件存储路径吗?现在可以上去看看这些文件都是什么样子。还有哪些落盘的文件?
另外还有几个文件可以了解下。
abort:这个文件是RocketMQ用来判断程序是否正常关闭的一个标识文件。正常情况下,会在启动时创建,而关闭服务时删除。但是如果遇到一些服务器宕机,或者kill -9这样一些非正常关闭服务的情况,这个abort文件就不会删除,因此RocketMQ就可以判断上一次服务是非正常关闭的,后续就会做一些数据恢复的操作。
checkpoint:数据存盘检查点
config/*.json:这些文件是将RocketMQ的一些关键配置信息进行存盘保存。例如Topic配置、消费者组配置、消费者组消息偏移量Offset 等等一些信息。
4 刷盘机制
RocketMQ需要将消息存储到磁盘上,这样才能保证断电后消息不会丢失。同时这样才可以让存储的消息量可以超出内存的限制。RocketMQ为了提高性能,会尽量保证磁盘的顺序写。消息在写入磁盘时,有两种写磁盘的方式,同步刷盘和异步刷盘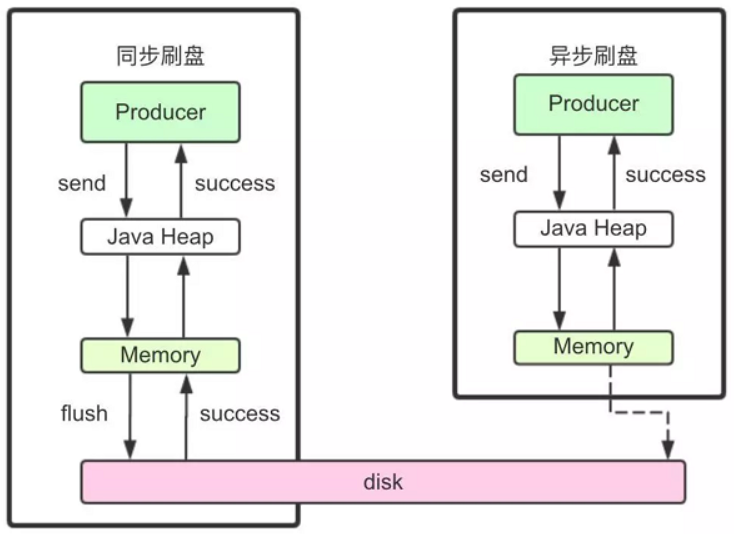
- 同步刷盘:在返回写成功状态时,消息已经被写入磁盘。具体流程是,消息写入内存的PAGECACHE后,立刻通知刷盘线程刷盘, 然后等待刷盘完成,刷盘线程执行完成后唤醒等待的线程,返回消息写 成功的状态。
- 异步刷盘:在返回写成功状态时,消息可能只是被写入了内存的PAGECACHE,写操作的返回快,吞吐量大;当内存里的消息量积累到一定程度时,统一触发写磁盘动作,快速写入。
配置方式:刷盘方式是通过Broker配置文件里的flushDiskType 参数设置的,这个参数被配置成SYNC_FLUSH、ASYNC_FLUSH中的 一个。
5 消息主从复制
如果Broker以一个集群的方式部署,会有一个master节点和多个slave节点,消息需要从Master复制到Slave上。而消息复制的方式分为同步复制和异步复制。
同步复制:
同步复制是等Master和Slave都写入消息成功后才反馈给客户端写入成功的状态。
在同步复制下,如果Master节点故障,Slave上有全部的数据备份,这样容易恢复数据。但是同步复制会增大数据写入的延迟,降低系统的吞吐量。
- 异步复制:
异步复制是只要master写入消息成功,就反馈给客户端写入成功的状态。然后再异步的将消息复制给Slave节点。
在异步复制下,系统拥有较低的延迟和较高的吞吐量。但是如果master节点故障,而有些数据没有完成复制,就会造成数据丢失。
- 配置方式:
消息复制方式是通过Broker配置文件里的brokerRole参数进行设置的,这个参数可以被设置成ASYNC_MASTER、 SYNC_MASTER、SLAVE三个值中的一个。
6 负载均衡
6.1Producer负载均衡
Producer发送消息时,默认会轮询目标Topic下的所有MessageQueue,并采用递增取模的方式往不同的MessageQueue上发送消息,以达到让消息平均落在不同的queue上的目的。而由于MessageQueue是分布在不同的Broker上的,所以消息也会发送到不同的broker上。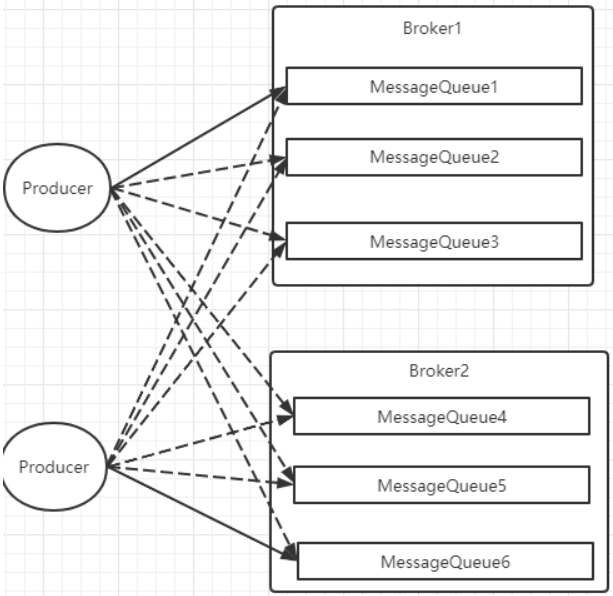
同时生产者在发送消息时,可以指定一个MessageQueueSelector。通过这个对象来将消息发送到自己指定的MessageQueue上。这样可以保证消息局部有序。
6.2 Consumer负载均衡
Consumer也是以MessageQueue为单位来进行负载均衡。分为集群模式和广播模式。
1、集群模式
在集群消费模式下,每条消息只需要投递到订阅这个topic的Consumer Group下的一个实例即可。RocketMQ采用主动拉取的方式拉取并消费消息,在拉取的时候需要明确指定拉取哪一条message queue。
而每当实例的数量有变更,都会触发一次所有实例的负载均衡,这时候会按照queue的数量和实例的数量平均分配queue给每个实例。
每次分配时,都会将MessageQueue和消费者ID进行排序后,再用不同的分配算法进行分配。内置的分配的算法共有六种,分别对应AllocateMessageQueueStrategy下的六种实现类,可以在consumer中直接set来指定。默认情况下使用的是最简单的平均分配策略。
- AllocateMachineRoomNearby: 将同机房的Consumer和Broker优先分配在一起。
这个策略可以通过一个machineRoomResolver对象来定制Consumer和Broker的机房解析规则。然后还需要引入另外一个分配策略来对同机房的Broker和Consumer进行分配。一般也就用简单的平均分配策略或者轮询分配策略。
感觉这东西挺鸡肋的,直接给个属性指定机房不是挺好的吗。
源码中有测试代码AllocateMachineRoomNearByTest。
在示例中:Broker的机房指定方式: messageQueue.getBrokerName().split(“-“)[0],而Consumer的机房指定方式:clientID.split(“-“)[0]
clinetID的构建方式:见ClientConfig.buildMQClientId方法。按他的测试代码应该是要把clientIP指定为IDC1-CID-0这样的形式。
- AllocateMessageQueueAveragely:平均分配。将所有MessageQueue平均分给每一个消费者
- AllocateMessageQueueAveragelyByCircle: 轮询分配。轮流的给一个消费者分配一个MessageQueue。
- AllocateMessageQueueByConfig: 不分配,直接指定一个messageQueue列表。类似于广播模式,直接指定所有队列。
- AllocateMessageQueueByMachineRoom:按逻辑机房的概念进行分配。又是对BrokerName和ConsumerIdc有定制化的配置。
- AllocateMessageQueueConsistentHash。源码中有测试代码AllocateMessageQueueConsitentHashTest。这个一致性哈希策略只需要指定一个虚拟节点数,是用的一个哈希环的算法,虚拟节点是为了让Hash数据在换上分布更为均匀。
2、广播模式
广播模式下,每一条消息都会投递给订阅了Topic的所有消费者实例,所以也就没有消息分配这一说。而在实现上,就是在Consumer分配Queue时,所有Consumer都分到所有的Queue。
7、消息重试
首先对于广播模式的消息, 是不存在消息重试的机制的,即消息消费失败后,不会再重新进行发送,而只是继续消费新的消息。
而对于普通的消息,当消费者消费消息失败后,你可以通过设置返回状态达到消息重试的结果。
1、如何让消息进行重试
集群消费方式下,消息消费失败后期望消息重试,需要在消息监听器接口的实现中明确进行配置。可以有三种配置方式:
- 返回Action.ReconsumeLater-推荐
- 返回null
- 抛出异常
如果希望消费失败后不重试,可以直接返回Action.CommitMessage。public class MessageListenerImpl implements MessageListener {@Overridepublic Action consume(Message message, ConsumeContext context) {//处理消息doConsumeMessage(message);//方式1:返回 Action.ReconsumeLater,消息将重试return Action.ReconsumeLater;//方式2:返回 null,消息将重试return null;//方式3:直接抛出异常, 消息将重试throw new RuntimeException("Consumer Message exceotion");}}
public class MessageListenerImpl implements MessageListener {@Overridepublic Action consume(Message message, ConsumeContext context) {try {doConsumeMessage(message);} catch (Throwable e) {//捕获消费逻辑中的所有异常,并返回 Action.CommitMessage;return Action.CommitMessage;}//消息处理正常,直接返回 Action.CommitMessage;return Action.CommitMessage;}}
2、重试消息如何处理
重试的消息会进入一个 “%RETRY%”+ConsumeGroup 的队列中。
然后RocketMQ默认允许每条消息最多重试16次,每次重试的间隔时间如下:
| 重试次数 | 与上次重试的间隔时间 | 重试次数 | 与上次重试的间隔时间 |
|---|---|---|---|
| 1 | 10 秒 | 9 | 7 分钟 |
| 2 | 30 秒 | 10 | 8 分钟 |
| 3 | 1 分钟 | 11 | 9 分钟 |
| 4 | 2 分钟 | 12 | 10 分钟 |
| 5 | 3 分钟 | 13 | 20 分钟 |
| 6 | 4 分钟 | 14 | 30 分钟 |
| 7 | 5 分钟 | 15 | 1 小时 |
| 8 | 6 分钟 | 16 | 2 小时 |
这个重试时间跟延迟消息的延迟级别是对应的。不过取的是延迟级别的后16级别。
messageDelayLevel=1s 5s 10s 30s 1m 2m 3m 4m 5m 6m 7m 8m 9m 10m 20m 30m 1h 2h
这个重试时间可以将源码中的org.apache.rocketmq.example.quickstart.Consumer里的消息监听器返回状态改为RECONSUME_LATER测试一下。
重试次数:
如果消息重试16次后仍然失败,消息将不再投递。转为进入死信队列。
另外一条消息无论重试多少次,这些重试消息的MessageId始终都是一样的。
然后关于这个重试次数,RocketMQ可以进行定制。例如通过consumer.setMaxReconsumeTimes(20);将重试次数设定为20次。当定制的重试次数超过16次后,消息的重试时间间隔均为2小时。
关于MessageId:
在老版本的RocketMQ中,一条消息无论重试多少次,这些重试消息的MessageId始终都是一样的。
但是在4.7.1版本中,每次重试MessageId都会重建。
配置覆盖:
消息最大重试次数的设置对相同GroupID下的所有Consumer实例有效。并且最后启动的Consumer会覆盖之前启动的Consumer的配置。
8、死信队列
当一条消息消费失败,RocketMQ就会自动进行消息重试。而如果消息超过最大重试次数,RocketMQ就会认为这个消息有问题。但是此时,RocketMQ不会立刻将这个有问题的消息丢弃,而会将其发送到这个消费者组对应的一种特殊队列:死信队列。
死信队列的名称是%DLQ%+ConsumGroup
死信队列的特征:
- 一个死信队列对应一个ConsumGroup,而不是对应某个消费者实例。
- 如果一个ConsumeGroup没有产生死信队列,RocketMQ就不会为其创建相应的死信队列。
- 一个死信队列包含了这个ConsumeGroup里的所有死信消息,而不区分该消息属于哪个Topic。
- 死信队列中的消息不会再被消费者正常消费。
- 死信队列的有效期跟正常消息相同。默认3天,对应broker.conf中的fileReservedTime属性。超过这个最长时间的消息都会被删除,而不管消息是否消费过。
通常,一条消息进入了死信队列,意味着消息在消费处理的过程中出现了比较严重的错误,并且无法自行恢复。此时,一般需要人工去查看死信队列中的消息,对错误原因进行排查。然后对死信消息进行处理,比如转发到正常的Topic重新进行消费,或者丢弃。
注:默认创建出来的死信队列,他里面的消息是无法读取的,在控制台和消费者中都无法读取。这是因为这些默认的死信队列,他们的权限perm被设置成了2:禁读(这个权限有三种 2:禁读,4:禁写,6:可读可写)。需要手动将死信队列的权限配置成6,才能被消费(可以通过mqadmin指定或者web控制台)。

若有收获,就点个赞吧
0 人点赞
