滑膜观测器调试
开环调试
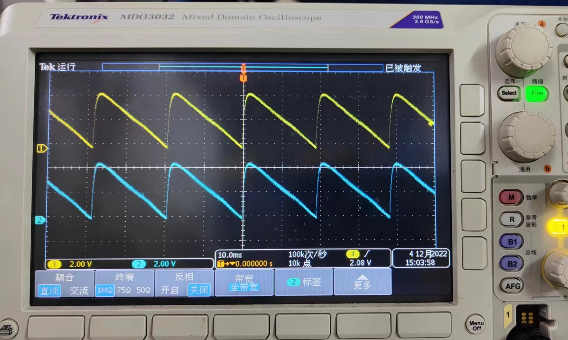
PWM0 两通道接示波器后,屏幕上打印的是开环给定同步转速积分电角度和滑模观测器估计转子电角度,只有两波形相似度高且波形平滑才能进行后续闭环调试过程。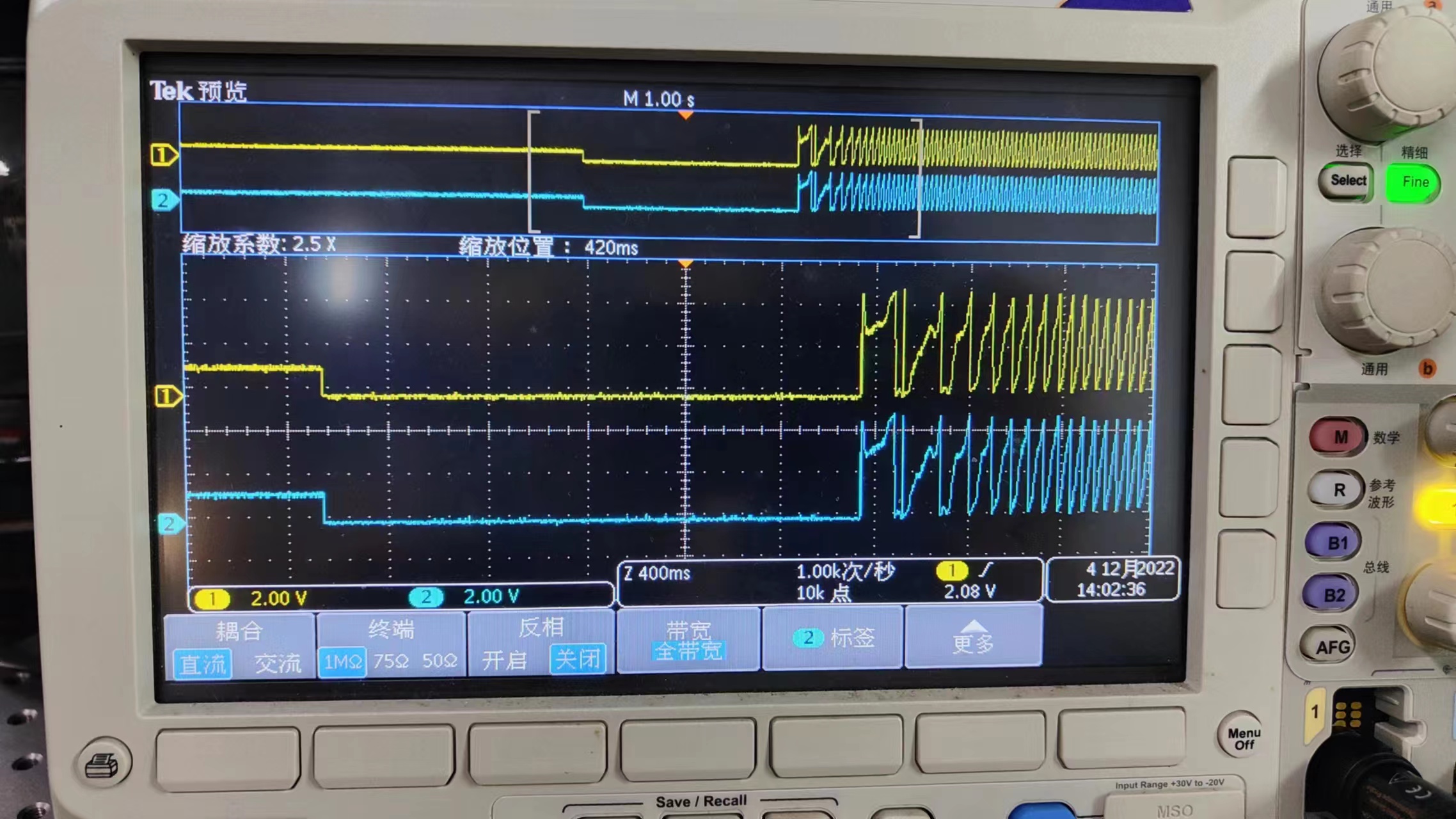
通过调整开环启动曲线参数,使电机顺利运行找到最佳的 IF 启动斜率,并确认最终的闭环切换频率(以估测电气角平滑为标准)。
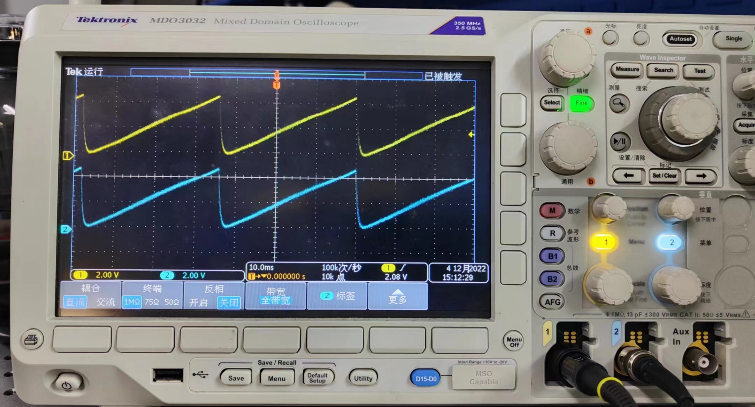
观测的两个波形很相似,但不够平滑: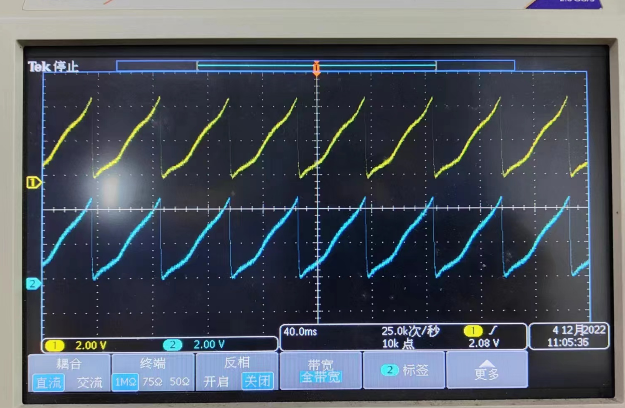
所以要对一些参数进行调整
电机参数:
- 定子电阻STATOR_RS
- DQ轴电感LD、LQ
- 极对数POLE_PAIR_NUM
滑膜观测器的一些参数:
- 开环的滑膜增益SMC_KSLIDE0
- SMC滤波器系数SMC_KSLF0(值越小,滤波效果越明显,0~32767)
- 滑膜边界SMC_MAXERR0
FOC开环参数
- 开环切换频率OPEN_LOOP_SPEED_HZ 这个频率越大,速度越快,观测出来的转子位置好像越平滑
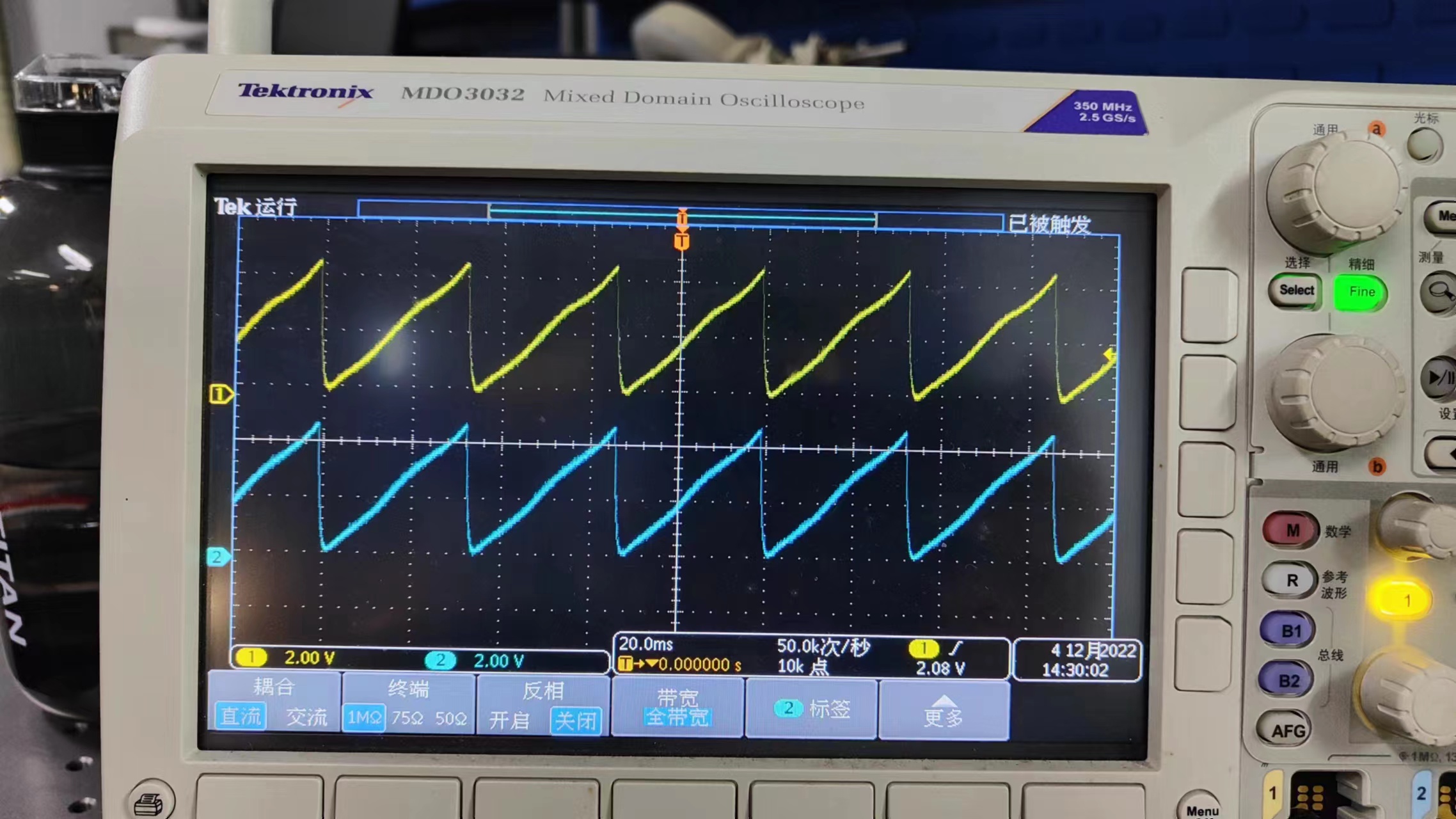
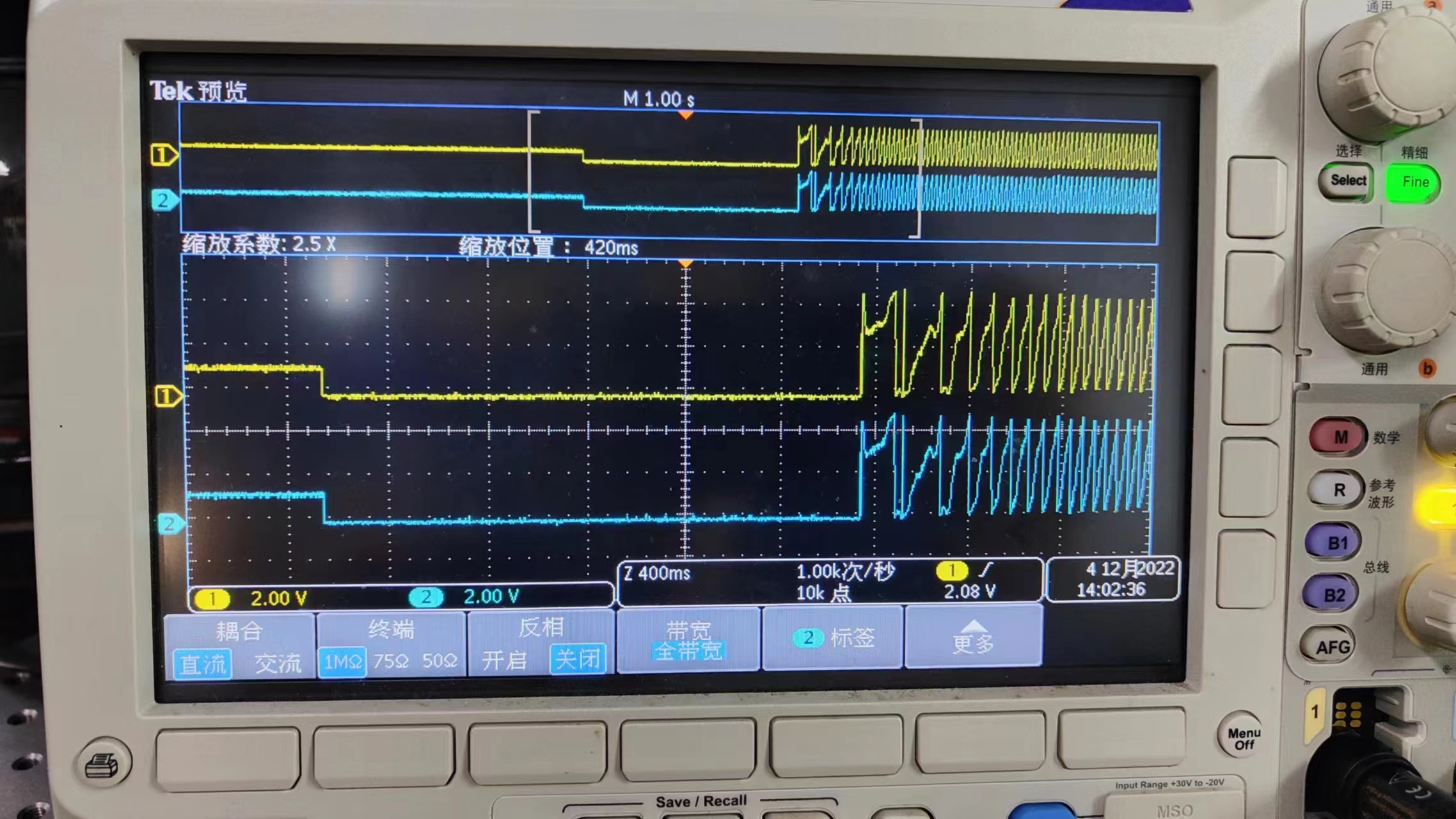
开环调试过后,通过 DAC 观察估测电气角波形应该为规则三角波,此时可设置电机为闭环运转模式。
闭环调试
将开环调试的 SMC_KSLIDE0,SMC_KSLF0,SMC_MAXERR0 参数同步到闭环参数SMC_KSLIDE1,SMC_KSLF1,SMC_MAXERR1 中,注意 SMC_KSLF1 由 SMC_KSLF0 自动计算获取。
闭环成功后,可参考带霍尔 FOC 方法进行速度环,电流环 PID 参数整定,并把以上速度环,电流环整定 PID 参数固化设置到 drive_parameters_define.h 相应宏定义中并保存,完成无感 FOC的调试工作。
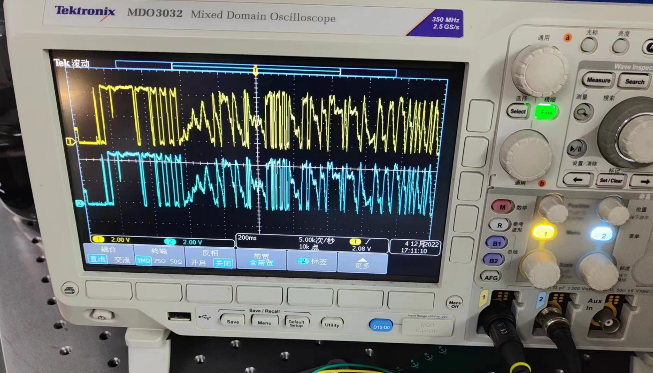
不知道为什么完全感觉不到开环到闭环的切换?搞不懂
IF VF DIRECT
IF

流频比控制,I/F控制是根据永磁同步电机负载特性,给变频器设置合适的电流-频率比,使得电机输出转矩与不同转速下的负载相匹配,以达到较高的运行效率。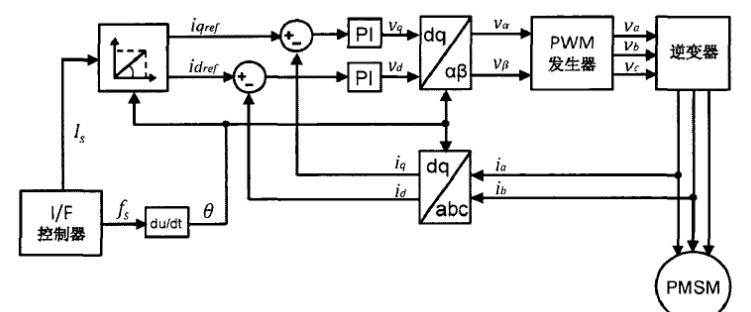
与有速度传感器控制系统框图存在较大区别:dq轴电流环给定电流idref 与 iqref 均来源于I/f控制器;不存在转速;并且关键一点是Park 变换与 反Park 变换的输入位置信号 theta 同样来源于I/F控制器。
VF
VF启动的转子预定位紧跟着启动,IF则是先预定位,等了一会才启动。
V/F控制是指V/F等于恒定值的控制。也就是V正比与F。
V是指逆变器输出的电压幅值,F是指逆变器输出电压的频率。
也就是逆变器输出电压的频率增加了,输出电压的幅值也需要增加,它们成正比。
保持V/F恒定,其实就是保持磁通恒定。
电机控制里面经常会希望电机磁通恒定,所以也常常采用V/F控制。
DIRECT
磁链观测器
一次/两次预定位

脉冲注入
高频注入
直线or五段曲线
电流钳没电了,暂时没测出来区别。

若有收获,就点个赞吧
0 人点赞
