前面我们已经完成了对机架和飞控的安装,这节我们进行对飞控的调试。
进行我们的飞控调参需要用到mission planner地面站 下载地址为https://firmware.ardupilot.org/Tools/APMPlanner/
安装完成后桌面会显示 的图标
的图标
打开地面站我们会进入到如图所示界面 
这个界面用来显示当前飞行器状态、相关参数
一、安装固件
如果您想更新飞控控制器运行的程序(固件),则必须将新的固件上传到飞控上。
注:烧录固件需将飞控接入电脑,不需要接入地面站
烧录固件有2种办法:
①在线烧录:直接通过地面站连接互联网直接下载烧录
点击初始设置,安装固件:在联网状态会自动获取最新的固件版本,点击相应版本,之后点击yes,地面站就会自动开始固件的烧录
②本地烧录: 将网站下载固件或加载自己修改后的固件,通过地面站加载到飞控
在安装固件界面中点击加载自定义固件,选择之前下载好的固件,点击打开按钮即可进行固件烧录
因为我们安装的是多旋翼,我们这里选择ArduCopter,点击图标后会弹出如图1所示的弹窗。
图一
二、连接(未安装固件请先安装固件)
选择与飞控USB接口相对应的数据线(本书以雷迅V5 nano飞控为例)雷迅V5 nano飞控为type-c接口
在电脑下→管理→设备管理器→COM口中查找飞控的端口
在右上角选择相应的COM口,波特率选择115200,点击连接,如图二,之后地面站会自动连接飞控,同时弹出如图三所示对话框,连接成功后地面站会自动获取飞控的所有参数如图四所示
图二 图三 图四
三、机架类型选择
当我们进行完上面的步骤后,我们就可以开始进行硬件方面的校准工作了
设置方法:
方法1:飞控连接上地面站,点击初始设置→必要硬件→机架类型→选择合适的框架类型→选择合适的机架类型。(如图五)
方法2:在全部参数表中找到FRAME_CLASS和FRAME_TYPE参数,看右边注释修改成合适的框架类型和机架类型。(如图六)
注意:AC3.5及更高版本固件强制性需要设置机架类型否则会报“check frame_class or frame_type”错误。
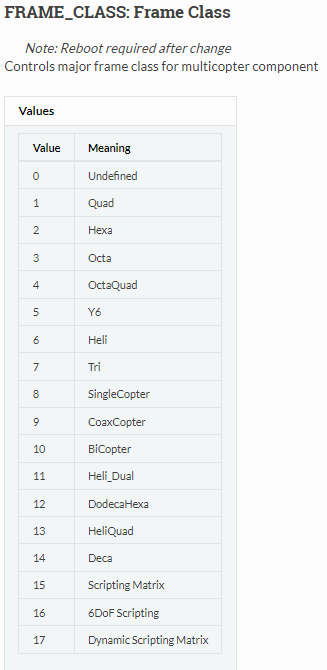
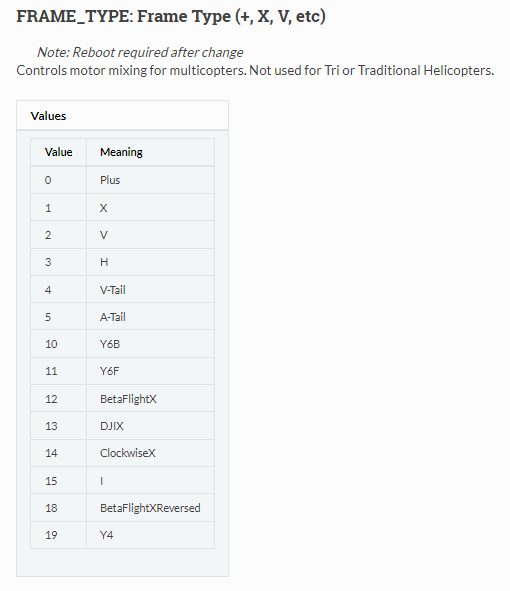
图 五 图 六
四、加速度计校准
3D加速度计校准:
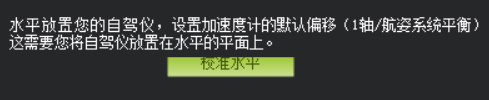
在地面站→初始设置→必要硬件→加速计校准,单击“ 校准加速计”以开始校准。 Mission Planner将提示您将无人机水平放置,放置完成后点击“完成时单击按钮”然后根据提示继续校准下一个方向,校准位置为:水平,右侧,左侧,机头向下,机头向上及其背面。完成校准过程后,Mission Planner将显示“校准成功!”。(如图七)
水平校准:
点击“calibrate LEVEL”按钮;飞控将进入初始化(LED快速闪烁);当按钮变成 “completed”完成水平校准
注:校准完成后,建议重新上电。
五、指南针校准
①打开地面初始设置》必要硬件》指南针校准。
②点击“开始(start)”按钮
③如果您的自动驾驶仪装有蜂鸣器,您应该听到一声提示音,然后每秒发出一声短促的哔哔声
④将无人机提起并向不同方向旋转旋转,以使每一侧(前,后,左,右,顶部和底部)向下指向地球几秒钟
⑤当无人机旋转时,绿色指示条应向右延伸得越来越远,直到校准完成
⑥成功完成后,将发出三声提示音,并出现“请重新启动自动驾驶仪”窗口,切换到其它界面再切换回本界面,查看校准得到的偏移值,如果偏移值为绿色则表示良好(每项偏移量的绝对值<400);黄色为尚可接受(每项偏移量的绝对值<600);红色为且不为零(可能存在磁场干扰)
⑦校准完成后,您需要重新启动自动驾驶仪
注:请勿在任何会产生金属或磁场的物体(计算机,手机,金属桌,电源等)附近校准罗盘,否则可能会导致校准异常。
六、遥控器校准
概述:
遥控器允许飞行员设置飞行模式、控制无人机的运动和方向,还可以打开/关闭辅助功能(例如,升高和降低起落架等)。
遥控器校准涉及捕获每个RC输入通道的最小值,最大值和中位值,以便ArduPilot可以正确反应您的输入。
通道:
多旋翼最少需要使用5个控制通道(默认1横滚、2俯仰、3油门、4方向、5模式切换),其它没有使用的通道可以外接其它设备或者闲置不用
校准前的准备:
- 确保电池已断开连接(这很重要,因为在校准过程中可能会意外触发解锁使电机旋转)
- 确保遥控器接收机已连接到自动驾驶仪
- 打开您的遥控发射机,如果它会自动回中,请确保它们在中间
- 使用USB数据线将自动驾驶仪连接到PC
- 在MP地面站上,按“连接”按钮,然后打开初设设置》必要硬件》遥控器校准界面
- 应该出现一些绿色的条,表明ArduPilot正在接收来自发送器/接收器的输入。如果没有条出现,请检查飞控与遥控器的连接以及遥控器与接收机的通信。
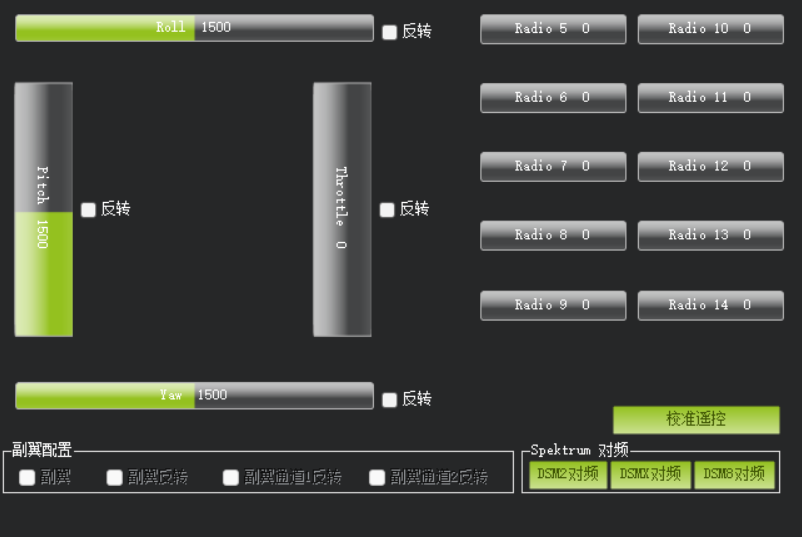
校准:
①点击校准遥控器按钮
②在弹出的对话框中选着OK
③逐个将遥控器的遥杆、开关、旋钮移动到极限位置,同时屏幕上会出现红线,用来显示当前的极限位置
④完成后单击
⑤将出现一个窗口,提示“确保所有操纵杆居中,油门向下,然后单击确定以继续”。将油门调至零,然后按“确定”。
⑥任务计划器将显示校准数据的摘要。正常值的最小值约为1100,最大值约为1900。
校准注意事项:
①可以通过设置FLTMODE_CH或MODE_CH参数来修改通道几控制模式。
②如果绿色条之一向错误的方向移动,则设置遥控器本身的通道反向;如果无法在遥控器中反转通道,则可以通过直接更改RCx_REVERSED参数(其中“ x”是输入通道从1到4)来反转通道。
③遥控器一般常见的一共有3个控制模式:
- Model1 日本手:左边的摇杆控制Pitch俯仰和YAW方向,右边的摇杆控制 Throttle油门和ROLL横滚
- Model2 美国手:左边的摇杆控制Throttle油门和YAW方向,右边的摇杆控制 Pitch俯仰和ROLL横滚
- Model3 中国手:左边的摇杆控制Pitch俯仰和ROLL横滚 ,右边的摇杆控制 Throttle油门 和YAW方向
八、电调校准
校准注意事项:
①每个电调可能校准方式都有所差异,具体需要查看电调说明书
②多数电调可以采用统一校准的方法(就是装好飞机后,通过飞控去校准),如果统一校准有问题,比如不同步,可以采用单独校准的方法(一个电调一个电调的校准,通过遥控接收机进行)本书会介绍两种校准电调的方法
③确保您的飞行器桨叶已经卸下统一校准:
- 打开遥控器,将油门推到最大,直到第五步
- 飞行器插上电池,解开安全开关,此时状态灯应该是红色、蓝色、黄色循环闪烁,进入电调校准程序。

- 拔掉电池,然后重新插入电池,三色灯会继续闪烁,马上长按安全开关进行解锁,数秒后,安全开关常亮后松手
- 等待你的电调发出声音,常规的哗哗声响说明你的电池数量(例如3S响三声,4S响4声),然后接着会有2声,说明最大油门被识别。
- 将遥控器油门打到最低值,此时,电机应该会发出长响,说明最低油门也被识别和记录
- 接着尝试推油门,看看是否全部电机都可以正确转起来,而且是同步的,如果是,说明校准完成
-
单一电调校准:
将ESC电调信号线插入遥控器接收机第三通道(油门通道)
- 将遥控器开机,油门打到最大
- 电调插入电池进行通电
- 然后马达会发出一个音调,然后2次哗哗声(具体音调可以看ESC说明书)
- 在发出2声鸣音后,将油门摇杆拉到最低
- 然后会听到一些哗哗声(3S电池 3声,如此类推),接着一个长哗声确认一个油门已经校准
- 尝试推一下油门,看看马达是否跟随转动。
- 如果校准没问题,对所有电调进行同样操作即可
九、飞行模式
设置步骤:
通过USB或者数传与地面站连接
- 在初始设置怕→必要硬件→飞行模式
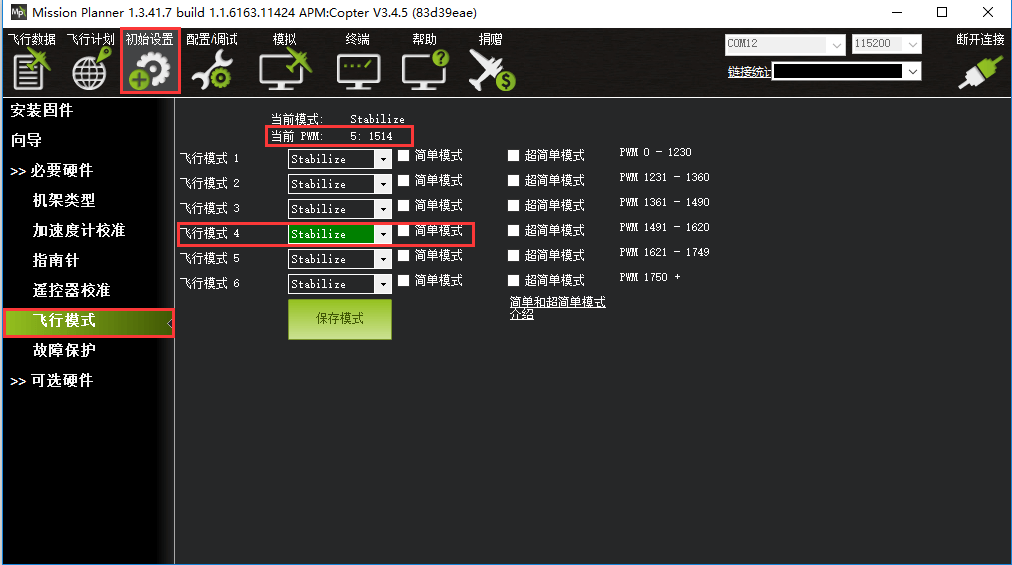
- 拨动遥控器第五通道(多旋翼默认第五通道控制模式)的段式开关,看每一个档位对应的模式位置,可以下拉选择该位置的飞行模式,然后点击保存模式。
如果不会变动,请观察当前PWM会不会变动,或者是否变动太小。
每个模式均有一定的PWM范围,如果超不出这个范围,模式是不会变动的,这个需要设置一下遥控器菜单 一共有14种模式,飞行模式介绍,理解每一个模式的含义和作用 一个三段开关只能切换3种模式。(3个开关只能切换出3种PWM值),可以通过混控的方式混出6种模式。
对于新手建议使用一个定高模式(Althold),一个定点模式(Loiter),一个返航模式(RTL);
对于新组装的飞机建议配置为自稳模式(stabilize)、定点模式(Loiter)、返航模式(RTL).
十、PID的调试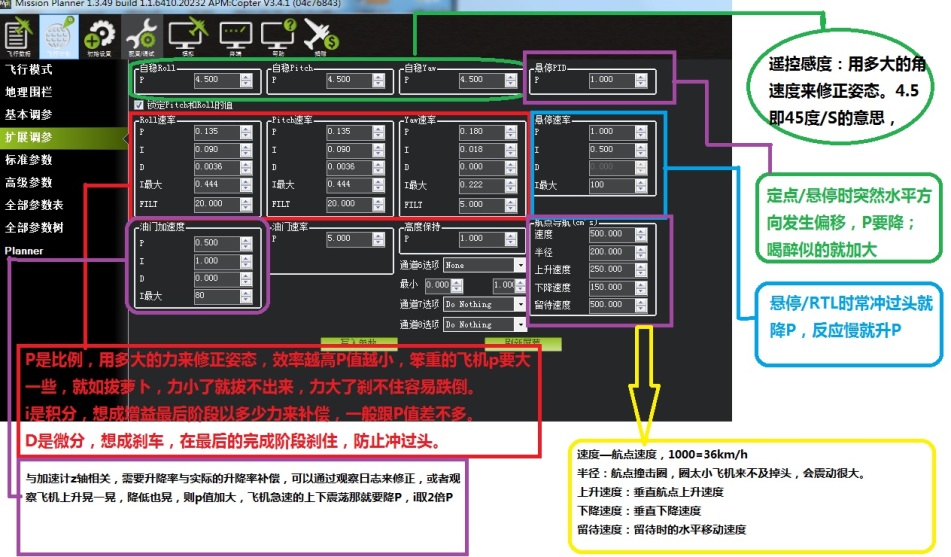
比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;
积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;
微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。
拓展:
常用控制规律的特点:
1、比例控制规律P:采用P控制规律能较快地克服扰动的影响,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现。它适用于控制通道滞后较小、负荷变化不大、控制要求不高、被控参数允许在一定范围内有余差的场合。如:水泵房冷、热水池水位控制;油泵房中间油罐油位控制等。
2、比例积分控制规律(PI):在工程中比例积分控制规律是应用最广泛的一种控制规律。积分能在比例的基础上消除余差,它适用于控制通道滞后较小、负荷变化不大、被控参数不允许有余差的场合。如:流量控制系统;油泵房供油管流量控制系统;温度调节系统等。
3、比例微分控制规律(PD):微分具有超前作用,对于具有容量滞后的控制通道,引入微分参与控制,在微分项设置得当的情况下,对于提高系统的动态性能指标,有着显著效果。因此,对于控制通道的时间常数或容量滞后较大的场合,为了提高系统的稳定性,减小动态偏差等可选用比例微分控制规律。如:加热型温度控制、成分控制。需要说明一点,对于那些纯滞后较大的区域里,微分项是无能为力,而在测量信号有噪声或周期性振动的系统,则也不宜采用微分控制。如:大窑玻璃液位的控制。
4、例积分微分控制规律(PID):PID控制规律是一种较理想的控制规律,它在比例的基础上引入积分,可以消除余差,再加入微分作用,又能提高系统的稳定性。它适用于控制通道时间常数或容量滞后较大、控制要求较高的场合。如温度控制、成分控制等。
鉴于D规律的作用,我们还必须了解时间滞后的概念,时间滞后包括容量滞后与纯滞后。其中容量滞后通常又包括:测量滞后和传送滞后。测量滞后是检测元件在检测时需要建立一种平衡,如热电偶、热电阻、压力等响应较慢产生的一种滞后。而传送滞后则是在传感器、变送器、执行机构等设备产生的一种控制滞后。纯滞后是相对与测量滞后的,在工业上,大多的纯滞后是由于物料传输所致,如:大窑玻璃液位,在投料机动作到核子液位仪检测需要很长的一段时间。
重要参数:
- ANGLE_MAX 控制的最大斜角,默认是4500,代表45°(超过该角度会自动上锁)
- ANGLE_RATE_MAX 控制飞行器的最大roll与pitch旋转速率,默认是18000,代表 180°/秒。
- ACRO_YAW_P 根据飞行员的偏航输入控制直升机旋转的速度。当偏航摇杆完全向左或向右握持时,默认值4.5表示200度/秒的旋转速度。较高的值将使其旋转得更快。
- Stabilize Roll P 和 Pitch P 控制直升机的横滚和俯仰角对飞行员输入的响应以及所需和实际侧倾角与俯仰角之间的误差。缺省值4.5将为角度的每1个错误度命令4.5度/秒的旋转速度。较高的增益(例如7或8)可以获得更快的响应速度并且抗风能力更强。
- RTL_ALT:飞行器返航之前的最低高度;设置为零以当前高度返回;可以设置的返回高度在1到8000厘米之间;默认返回的高度为15米(1500)
RTL_ALT_FINAL:在返航的最终阶段或是完成一个任务之后,飞行器将会到达的高度;设置为零飞行器将会自动着陆;最终的返回高度可以从0到1000厘米之间调整。
· RTL_LOIT_TIME:在最终下降之前,在“home”点上方悬停的时间,以“毫秒”为单位;悬停时间可以从0到60,000毫秒之间进行调整。
· WP_YAW_BEHAVIOR:设置自动驾驶仪在任务和返航期间如何控制“Yaw”;0 =永不改变Yaw;1 =机头朝向下一个航路点,或是对于返航,机头朝向“home”点;2 =机头背对下一个航路点,或是对于返航,机头背对“home”点。
· LAND_SPEED:最终着陆阶段的下降速度,以厘米每秒为单位; 着陆速度可调范围为20至200厘米每秒。
· Waypoint_Speed的值用来设置两个航点间的飞行速度; 两个航点间的默认速度为6米每秒。
· NAV_PI用于让你的飞行器在两个航点间保持期望的飞行速度。
· NAV_P用于倾斜飞行器以达到期望飞行速度的速率, 使其速率变快 或是没有速度。(P越大飞行器倾斜的

若有收获,就点个赞吧
0 人点赞
