打开mission planner地面站连接好相应的飞控端口(飞控的COM口从电脑右键管理中设备管理器查看)此书以雷迅V5nano飞控为例(注:新飞控需要先行安装固件)
无人机中硬件分为必要硬件和可选硬件。
其中必要硬件有:加速度计、指南针、遥控器、伺服舵机、电调、模式设置、故障保障、HW ID、ADSB。
可选硬件有:RTK、sik电台(数传)、OSD,相机云台等。
加速度计:在地面站~初始设置~必要硬件中
校准流程:①单击“ 校准加速计”以开始校准。 Mission Planner将提示您将无人机水平放置,放置完成后点击“完成时单击按钮”然后根据提示继续校准下一个方向。(水平,右侧,左侧,机头向下,机头向上及其背面)(初始界面如:图一)<br /> ②完成校准过程后,Mission Planner将显示“校准成功!<br /> 校准示意图如下:<br />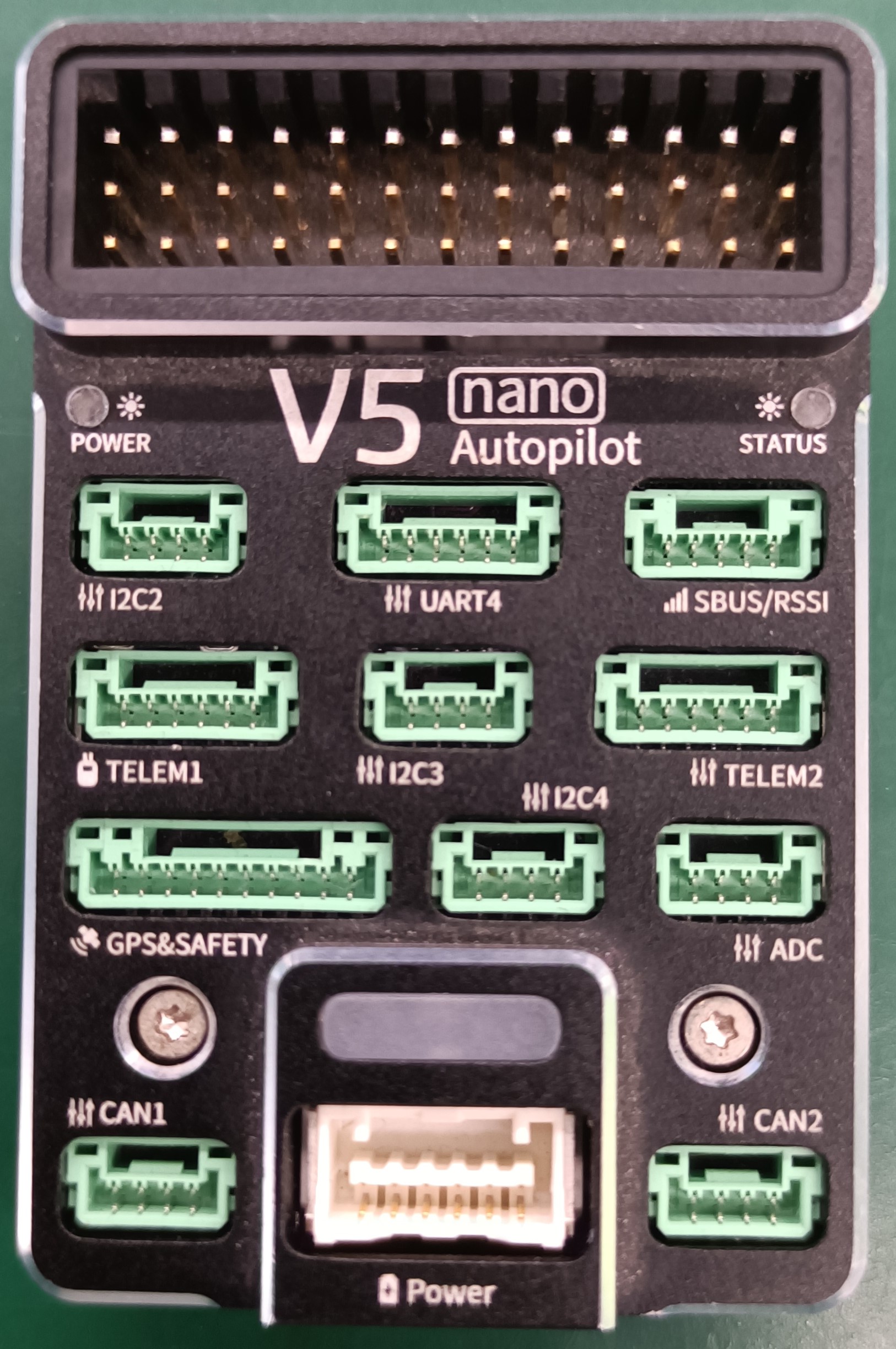<br /> 拓展:AC3.4.0及以上版本固件需要进行3D校准和水平校准<br /> 校准流程:①校准加速计后;②点击“calibrate LEVEL"按钮;飞控将进入初始化(LED快速闪烁);③当按钮变成 "completed"完成水平校准。<br /> 建议:完成了校准加速计和罗盘后,建议重新上电<br /> 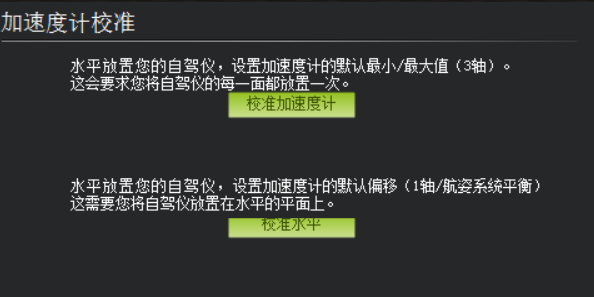<br /> 图一
指南针:在地面站~初始设置~必要硬件中
校准流程:①点击“开始(start)”按钮;听到一声提示音,然后每秒发出一声短促的哔哔声(初始界面如:图二)<br /> ②将无人机提起并向不同方向旋转旋转,以使每一侧(前,后,左,右,顶部和底部)向下几秒钟,旋转中绿色指示条向右延伸得越来越远<br /> ③成功完成后,将发出三声提示音,并出现“请重新启动自动驾驶仪”窗口<br /> ④校准完成后,重新启动自动驾驶仪,查看校准得到的偏移值,如果偏移值为绿色则表示良好;黄色为尚可接受(每项偏移量的绝对值<600);红色为且不为零(可能存在磁场干扰)<br /> 注意:①请勿在任何会产生金属或磁场的物体(计算机,手机,金属桌,电源等)附近校准罗盘;<br /> ②罗盘分为内置罗盘和外置罗盘()<br /> ③指南针校准失败,一般为单个罗盘或多个罗盘存在周围磁场干扰导致,您可以通过查看参数表中的指南针(mag)数据分析;正常情况下,没有完成指南针校准前,X、Y、Z的数据不超700(不分正负),且波动不超20;如果不符合上述条件即可能是存在持续/不持续的磁场干扰;您可以通过调整罗盘的安装位置或移开干扰源<br /><br /> 图二
遥控器:在地面站~初始设置~必要硬件中
校准流程:①点击“校准遥控器”按钮(初始界面如:图三)<br /> ②弹出对话框选择OK<br /> ③将遥控器的操纵杆,旋钮和开关移至极限位置。红线将出现在校准条上,以显示到目前为止看到的最小值和最大值<br /> ④选择完成后单击<br /> ⑤将出现一个窗口,提示“确保所有操纵杆居中,油门向下,然后单击确定以继续”。将油门调至零,然后按“确定<br /> ⑥任务计划器将显示校准数据的摘要(如:图四)<br /> 注意:①Model1 日本手:左边的摇杆控制Pitch俯仰和YAW方向,右边的摇杆控制 Throttle油门和ROLL横滚<br /> Model2 美国手:左边的摇杆控制Throttle油门和YAW方向,右边的摇杆控制 Pitch俯仰和ROLL横滚<br /> Model3 中国手:左边的摇杆控制Pitch俯仰和ROLL横滚 ,右边的摇杆控制 Throttle油门 和YAW方向<br /> ②确保电池已断开连接<br /> ③确保遥控器接收机已连接到自动驾驶仪<br /> ④标准数值的1100-1900,特别是油门通道,不要过低或者过高,以免出现异常<br />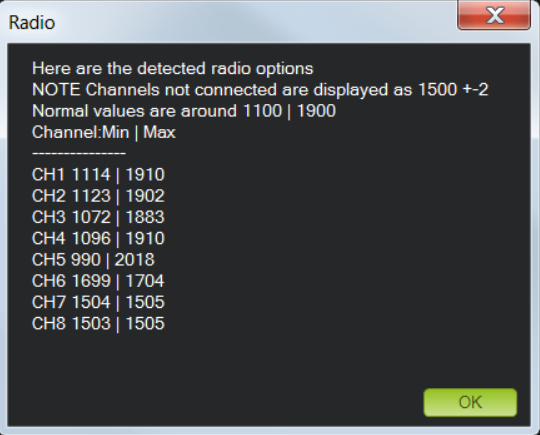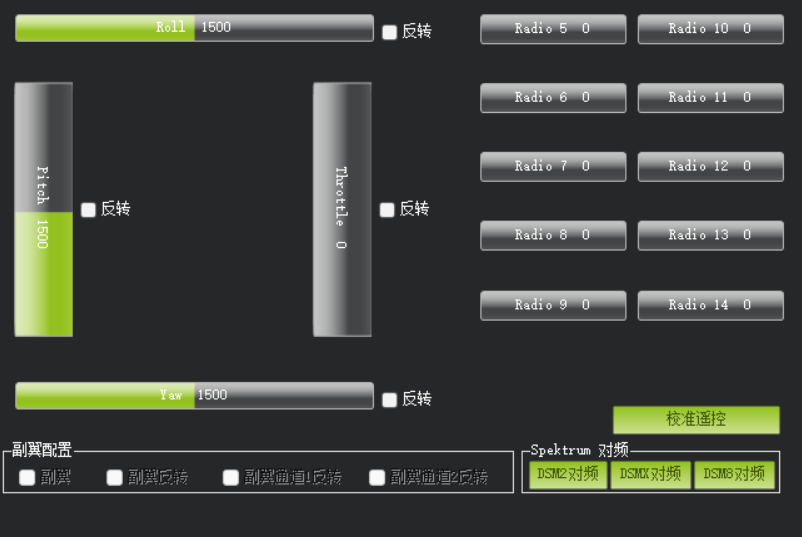<br /> 图三 图四
电调校准:在地面站~初始设置~必要硬件中
校准前检查:①确保电调正常工作 。 <br /> ②校准必须拆除螺旋桨!<br /> ③不要使用USB连接电脑<br /> ④校准之前,确认摇杆通道没有反向。<br /> 校准流程(使用带BEC电调):①将ESC电调信号线插入遥控器接收机第三通道(油门通道)<br /> ②将遥控器开机,油门打到最大(提前对好频)<br /> ③电调插入电池进行通电<br /> ④然后电机会发出一个音调,然后2次哗哗声(具体音调可以看ESC说明书)<br /> ⑤在发出2声鸣音后,将油门摇杆拉到最低<br /> ⑥然后会听到一些哗哗声(3S电池 3声,如此类推),接着一个长哗声确认一个油门已经校准<br /> ⑦尝试推一下油门,看看马达是否跟随转动。<br /> 校准流程(使用不带BEC电调):①将电调信号线插入到飞控油门输出通道,接收机油门通道接至油门输入通道<br /> ②打开遥控器,并将油门遥杆推至最高位<br /> ③使用电源管理模块(PMU)给飞控供电<br /> ④听到两声"滴滴"后将油门收到最低位 <br /> ⑤然后会听到一些哗哗声(3S电池 3声,如此类推),接着一个长哗声确认一个油门已经校准<br /> ⑥轻推油门,确认校准成功
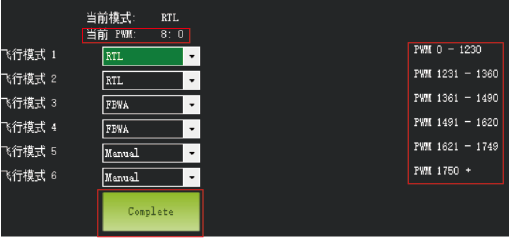
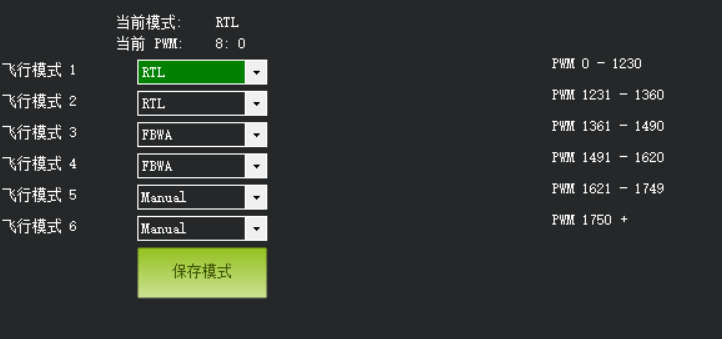
飞行模式:在地面站~初始设置~必要硬件中
调试依据:每种飞行模式代表不同的PWM波段,要想改变飞行模式,只需要改变发送的PWM波
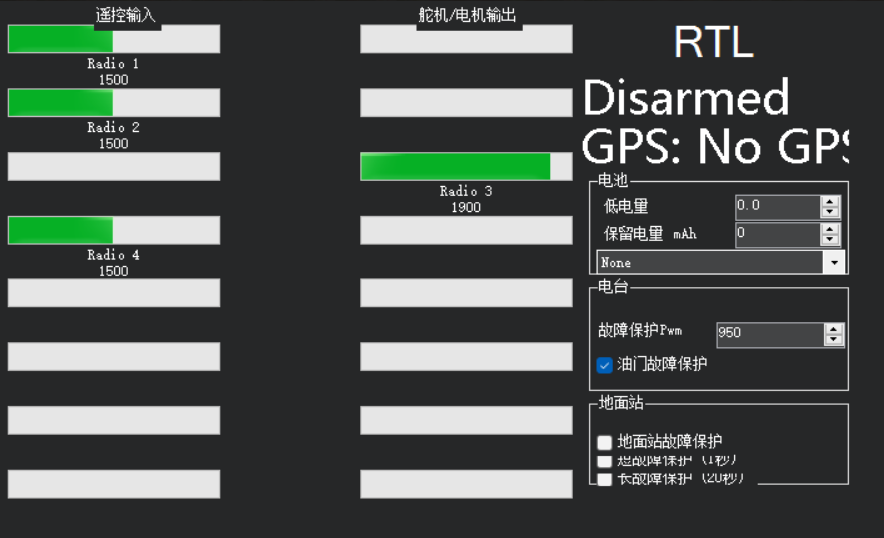
故障保护:
可选硬件:
对于无人机来说,除了控制飞行所必须的硬件以外,其他的我们都可以称之为可选硬件,因此可选硬件的种类很多,本书中我们介绍常用的两种可选硬件的调试
光流 在地面站 初始设置 可选硬件中
3.注意在mp地面站刷的固件是apm版本,电机滴滴滴响的解决方法在原先基础上增加两条:遥控器没有开;电调没有校准,校准方法:(1)遥控器油门拉满,插电,等电机响几秒,指示灯闪彩灯,拔电(2)插电,电机响,彩灯,油门杠拉到底,拔电。(3)插电,彩灯,按swich解锁,遥控器打到右下角,蜂鸣器长响滴~~~,推油门,电机转。 4.注意在室内调试光流时关闭GPS,gps关闭应该在参数表里寻找gps相关的参数(比如在gps主标题下的参数),选择no gps,gps关闭的标识:mp连接到飞控,gps显示无gps。 5.hereflow光流对应的飞行模式为flowhold 6.在flowhold模式下当出现摇摆剧烈一直不稳定,及时切回自稳模式,进行降落。注意在自稳模式下起飞,到达一定高度时再切换到flowhold模式
相机云台

若有收获,就点个赞吧
0 人点赞
