一、 加速度计及其结构原理介绍
1、 基本原理
加速度计,或称加速度传感器是一种能够测量加速度的设备。加速度传感器可以帮助你检测到一个物体或事物此时此刻的状态,是停止,还是在运动,是在向前、向后、向左、还是向右运动,以及是在向上还是向下运动。加速度传感器甚至可以用来分析物体的振动。
已知系统内部的初速度和加速度,能够通过积分关系得出线速度和直线位移。
加速度计的核心结构是弹簧阻尼系统,系统中的位移通过电容在外部表现为输出电压。而由前所述,以位移和加速度的确定关系为媒介,能够通过输出电压获得加速度。
图一: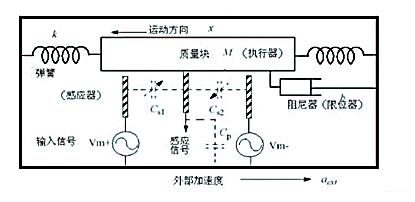
加速度计的结构模型如图所示:它采用物体-弹簧-阻尼器系统来感应加速度。当加速度计连同物体(该物体的加速度就是待测的加速度)一起做加速运动时,物体就受到惯性力的作用向相反的方向运动。物体发生的位移受到弹簧和阻尼器的限制,显然该位移与外界加速度具有一一对应的关系:外界加速度固定时,物体具有确定的位移;外界加速度变化时(只要变化不是很快),物体的位移也发生相应的变化。另一方面,当物体发生位移时,感应器之间的电容就会发生相应的变化;如果测得感应器输出电压的变化,就等同于测得了物体的位移。既然物体的位移与待测加速度具有确定的一一对应关系,那么输出电压与外界加速度也就有了确定的关系,即通过输出电压就能测出加速度的数值。
加速度传感器分为二轴与三轴加速度传感器,二轴加速度传感器:能够同时检测两个方向(x轴,y轴)上的加速度。三轴加速度传感器:能够同时检测三个方向上的加速度,x,y,z。
加速度计测量一些特性有如下几个方面:
(1)倾斜度侦测
倾斜度侦测仪。加速传感器在静止时,可用来检测倾斜角,倾斜角在90 ~+90之间变化时,重力加速度信息会分配到三个轴上,加速度传感器输出的三轴分量可以计算出倾斜角度
(2)运动检测
运动检测可用于运动控制,计步器,基本运动检测。
(3)定位侦测
定位侦测用于汽车导航,防盗设备,地图跟踪。 定位侦测需要测量的因素包括:加速度的范围是多少及加速传感器如何安装。对加速度数据进行二重积分即可得到位置数据。
(4)震动侦测
震动侦测可用于下降记录,黑盒子/故障记录仪,硬盘保护,运输和处理监视器。 震动侦测主要收集加速度计的原始数据并进行阈值选择。一般按照被测量对象的减速度决定了震动检测所需的加速传感器的规则选取。
(5)振动侦测
振动侦测可用于地震活动监视器,家电平衡和监测。 振动侦测需要考虑的因素包括:分析振动频率的多少,确定g值的范围及最适当的加速传感器安装位置。借助于快速傅立叶变换对加速度资料的分析可得到振动频率的情况,快速傅立叶变换允许振动信号被分解成它的谐波分量,而每个电机振动都有它自己的谐波分量信号。
(6)自由下落侦测
自由落下侦测可用于自由落体保护,下降记录,下降检测,运动控制和认知等。 自由落下侦测包含线性落下、旋转型落下和抛射落下。
2、 加速度计的种类
目前的及速度计主要有:
利用电子势垒隧道效应的隧道电流式,即通过输出电压就能测出加速度的数值;
利用电容极板间距变化的电容式,即通过输出电压就能测出加速度的数值;
利用压敏电阻电阻率变化的压阻式,压敏电阻的电阻率变化与质量块的位移有关,其工作原理是将被测加速度转换为硅材料的电阻率变化来进行加速度的测量;
利用压电材料电压变化的压电式,压敏电阻的电阻率变化与质量块的位移有关,其工作原理是将被测加速度转换为硅材料的电阻率变化来进行加速度的测量。
二、 飞控系统中的加速度计
无人机飞控系统中的加速度计是用来检测无人机在 XYZ 三轴方向所承受的加速力。它也能决定无人机在静止状态时的倾斜角度。 当无人机呈现水平静止状态,X 轴与 Y 轴为 0g输出,而 Z 轴则为 1g输出。 地球上所有对象所承受的重力均为1 g。若要无人机 X 轴旋转 90 度,那幺就在 X 轴与 Z 轴施以 0 g输出,Y轴则施以 1 g输出。倾斜时,XYZ 轴均施以 0 到 1 g之间的输出。相关数值便可应用于三角公式,让无人机达到特定倾斜角度。
加速度计同时也用来提供水平及垂直方向的线性加速。相关数据可做为计算速率、方向,甚至是无人机高度的变化率。 加速度计还可以用来监测无人机所承受的震动。
对于任何一款无人机来说,加速度计都是一个非常重要的传感器,因为即使无人机处于静止状态,都要靠它提供关键输入。
图二: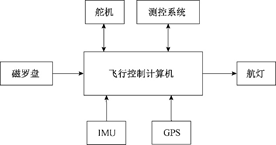
1、 概述
图二展示了某小型无人机的飞行控制系统,加速度计作为惯性测量单元(IMU)的一部分和陀螺仪一起为、为无人机提供姿态解算支持。舵机、遥控接收机、IMU、GPS、数传电台、磁罗盘、航灯以及任务设备等各单元均通过相应接口与飞控计算机直接相连。
2、 飞控系统
无人机飞行控制系统是一个对可靠性与实时性要求极高的多任务实时控制系统。现代飞控系统为了避免因为主控单元的解算负担过重为导致系统实时性下降等问题,普遍采用分布式的飞行控制系统设计方案。
基于CAN总线的无人直升机分布式飞行控制系统结构如图2所示。根据无人直升机飞控系统的实际需求,在保留遥控接收机接口和部分备份串口的的情况下,其他设备不再各自直接与飞控计算机相连,而是通过将各单元挂接在CAN总线上的方式与飞控计算机进行通信。
图三:
3、 6050加速度计模块和姿态测量
概述
无人机姿态角分别是俯仰角(Pitch),横滚角(Roll)和航向角(Yaw)。MPU6050是InvenSense公司生产的整合性6轴运动处理器件,内部整合了3轴陀螺仪和3轴加速度计。相对于多传感器融合,还消除了组合陀螺仪与加速度时间轴之差的问题。MPU6050加速度测量范围最大可达±16g,陀螺仪测量范围最大每秒可达±2000°,完全满足无人机姿态测量需求。微处理器从MPU6050中得到的是数字信
图四:
号,不需要额外进行A/D转换,提高了实时性并减小了误差。MPU6050在外接HMC5883L的情况下,引脚描述如表1所示。MPU6050通过I2C协议进行通信。
mpu6050的引脚定义如图4所示:
图五:
利用加速度计监测角度
图六:
测量倾角最常见的例子是建筑中使用的水平仪,在重力的影响下,水平仪内的气泡能大致反映水柱所在直线与重力方向的夹角关系,利用T字型水平仪,可以检测出横滚角与俯仰角,但是偏航角是无法以这样的方式检测的。
在电子设备中,一般使用加速度传感器来检测倾角,它通过检测器件在各个方向的形变情况而采样得到受力数据,根据F=ma转换,传感器直接输出加速度数据,因而被称为加速度传感器。由于地球存在重力场,所以重力在任何时刻都会作用于传感器,当传感器静止的时候(实际上加速度为0),传感器会在该方向检测出加速度g,不能认为重力方向测出的加速度为g,就表示传感器在该方向作加速度为g的运动。
当传感器的姿态不同时,它在自身各个坐标轴检测到的重力加速度是不一样的,利用各方向的测量结果,根据力的分解原理,可求出各个坐标轴与重力之间的夹角。
因为重力方向是与地理坐标系的”天地”轴固连的,所以通过测量载体坐标系各轴与重力方向的夹角即可求得它与地理坐标系的角度旋转关系,从而获知载体姿态。
加速度传感器检测的缺陷
由于这种倾角检测方式是利用重力进行检测的,它无法检测到偏航角(Yaw),原理跟T字型水平仪一样,无论如何设计水平仪,水泡都无法指示这样的角度。
另一个缺陷是加速度传感器并不会区分重力加速度与外力加速度,当物体运动的时候,它也会在运动的方向检测出加速度,特别在震动的状态下,传感器的数据会有非常大的数据变化,此时难以反应重力的实际值。
三、 结语
加速度计 (accelerometer) 是测量加速度的仪表。加速度测量是工程技术提出的重要课题。
加速度计测量加速度的功能在无人机飞行控制中具有重要作用。结合加速度计和陀螺仪能够实现高精度的姿态解算。
————————————————
版权声明:本文为CSDN博主「断水客」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_33904382/article/details/107472589

若有收获,就点个赞吧
0 人点赞
