1、I2C总线
I2C 通讯协议(Inter-Integrated Circuit),中文应该叫集成电路总线,它是一种串行通信总线,使用多主从架构,是由 Phiilps 公司开发的,由于它引脚少,硬件实现简单,可扩展性强,被广泛地使用在系统内多个集成电路(IC)间的通讯,如微控制器与传感器阵列,显示器,IoT设备,EEPROM等之间的通信。
V5 nano飞控接口1、5、8都是I2C总线,通常连接外置指南针等I2C设备,用于飞控与I2C设备的通信。I2C口四根线,其中,SDA是串行数据线,SCL是串行时钟线,这两条数据线需要接上拉电阻。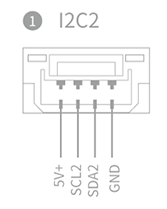
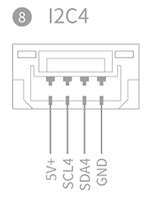
I2C总线
2、UART串口
UART是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。在计算机中,UART相连于产生兼容RS232规范信号的电路。但UART串口的RXD、TXD等一般直接与处理器芯片的引脚相连,而RS232串口的RXD、TXD等一般需要经过电平转换(通常由Max232等芯片进行电平转换)才能接到处理器芯片的引脚上,否则高的电压很可能会把芯片烧坏。
V5 nano飞控接口2是UART串口,如有设备通过串口通信,可连接在此口上。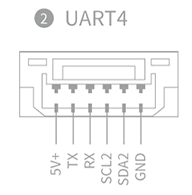
UART串口
3、DSM/SBUS/RSSI
V5 nano飞控接口3是DSM/SBUS/RSSI,包含DSM、SBUS、RSSI信号输入接口,DSM接口可以连接DSM卫星接收机、SBUS接口连接SBUS遥控器接收机、RSSI用于信号强度回传模块。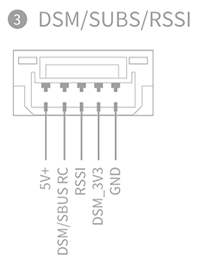
DSM/SBUS/RSSI
4、TELEM串口
V5 nano飞控接口4、6是TELEM串口,连接数传等,用于输入和输出MAVLINK数据。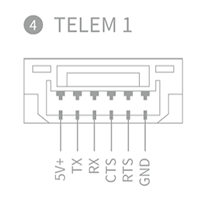
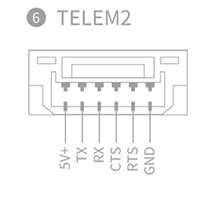
TELEM串口
5、GPS&SAFETY
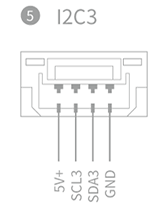
V5 nano飞控接口5是GPS&SAFETY,用于连接Neo Gps,它包含GPS、安全开关、蜂鸣器接口。其中,GPS使用SCL、SDA两根线,即I2C;安全开关使用SAFETY_SW、SAFE_VCC两根线;指示灯使用SAFETY_SW_LED线;蜂鸣器使用BUZZER线;TX和RX是串口通信线;当然,5V+和GND是每个设备都要用到的。
GPS&SAFETY接口
6、ADC检测口
ADC即模拟数字转换器(Analog-to-digital converter)是用于将模拟形式的连续信号转换为数字形式的离散信号的一类设备。V5 nano飞控接口9是ADC检测口,3V3 ADC表示可以测量3.3V以内的模拟信号,6V6 ADC表示可以测量6.6V以内的模拟信号,这往往用于一些外部设备的检测,如电压、电流等。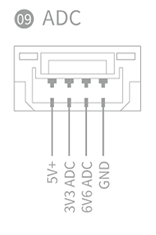
ADC检测口
7、CAN总线
CAN 是Controller Area Network 的缩写,是ISO国际标准化的串行通信协议。CAN属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通信网络,具有突出的可靠性、实时性和灵活性。
V5 nano飞控接口10、12都是CAN总线,连接CAN GPS等UAVCAN设备,用于飞控与UAVCAN设备的通信。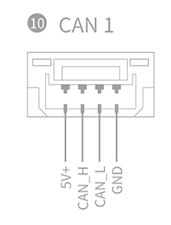
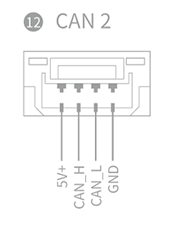
CAN总线
8、PM接口
V5 nano飞控接口11、14是电源接口(POWER MODULES),连接电源PM模块,具有电源输入&AD电压电流检测功能。POWER_IN是电源供电端口,CURRENT是电流检测输入端口,VOLTAGE是电压检测输入端口。需要说明的是PM2无电源输入,AD检测只在运行Ardupilot固件时有效。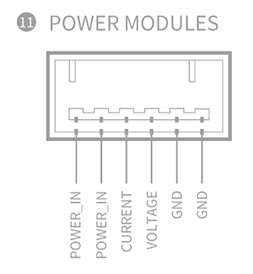

PM接口
9、DSU7
V5 nano飞控接口13是DEBUG&UART,用于FMU芯片调试,读取DEBUG设备信息。一般在芯片级调试中才用到。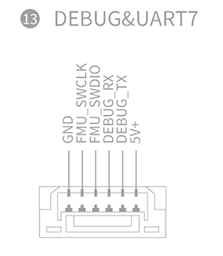
10、RC输入
RC输入,是指遥控信号的输入。V5 nano飞控的RC输入有2个,一是输出端面的RC接口,这就是一个SBUS遥控器信号的输入端,一般的遥控器接收器就是接这个端口。中间的+端,可以给接收器供电,SBUS信号走S端,加上电源地-,一共是三根线。二是接口3,其中DSM/SBUS RC端,加上5V+、GND,也组成了3根线的SBUS口,只是接口需要单独连线。 V5 nano的 SBUS上支持18个输入通道,其中14个可用 RCn_FUNCTION 设置分配功能。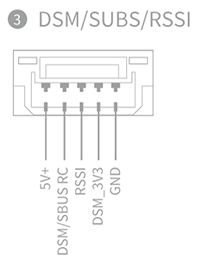
RC输入
11、USB固件下载
飞控软件的更新,即固件下载,就是通过USB端口(在飞控的右侧面),使用Type-C线连接到电脑的MP或QGC地面站。具体操作见使用MP地面站调试飞控章节。

若有收获,就点个赞吧
0 人点赞
