规划方法
1、使用坐标编辑器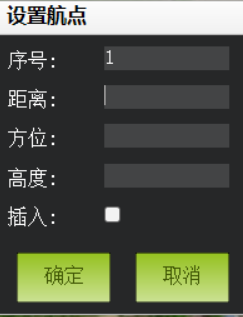
2、使用鼠标点击添加、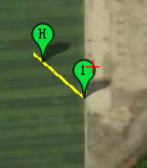
起飞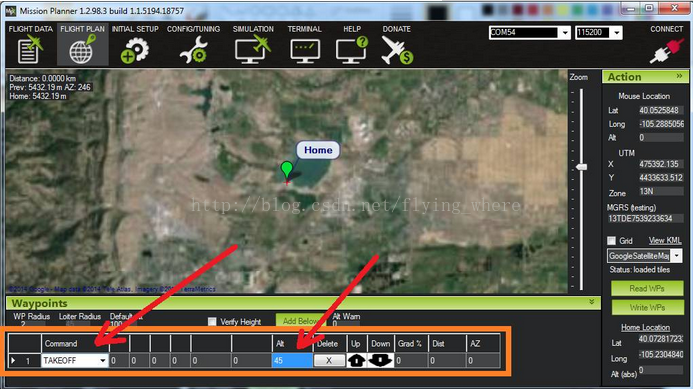
飞机将会从目前位置爬升到目标高度(单位:米)。这应该是几乎所有中第一个执行的任务,如果在开始执行操作之前飞机已经处于飞行状态,飞行器将会直接爬升到预定高度。如果飞行器已经达到了预定高度之上时将会忽视这个指令,立即执行下一个指令。
直线航路点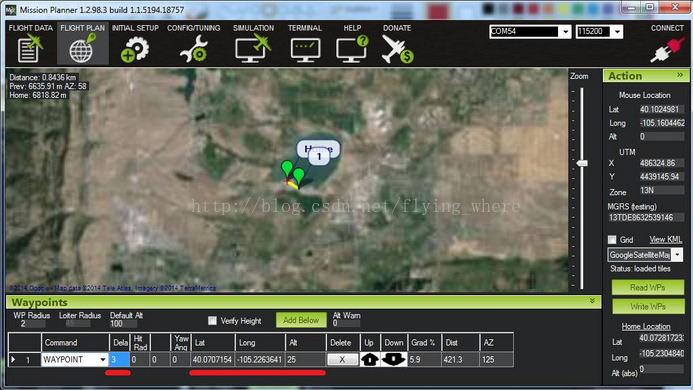
飞机将会沿直线飞行到预定经纬度和高度的位置(单位:米)。
延迟:在执行到下一个指令前飞机会在航路点出等待一定的时间(单位:秒)。
Hit Rad:不支持,意思就是保持到将被限制完成的目标航路点的距离。这个指令不被支持。相反这个WPNAV_RADIUS 参数将被使用(注意“WP半径”在屏幕上得标示,或者通过标准参数清单调整)。
LAT,LON:目标经纬度,如果左为零将会保持在当前位置。
ALT 目标高度在家的位置之上,如果左边为零将会保持当前高度。
曲线航路点
高于3.2版本的都支持曲线航路点,曲线航路点和直线航路点设置的参数都是一样的,但是当执行飞行时飞机是按平滑路径(垂直和水平)而不是直线路径。曲线航路点和直线航路点合一混合使用,如上图。
Loiter-Time(悬停时间)
飞机飞到预定位置等待预定时间(秒),这个任务就相当于悬停模式。
Loiter_Turns(绕圈旋转飞行)
这个任务相当于绕圈模式,飞机将会绕预定经纬度和高度点飞行,可设参数CIRCLE_RADIUS课改变飞行半径。
TURN:飞机旋转一圈绕点飞行圈数。
Dir 1=CW :-1表示逆时针,+1顺时针(飞机绕点飞行的方向,不是旋转方向)。
Loiter_Unlimited
飞机在不确定的位置悬停等待,处于这个任务是将不会继续过去的任务。
Return-To-Launch(返回起飞)
这个任务相当于返航模式,详细描述在返航模式页面中,在返航前飞机首先爬升到预定高度(默认15米),这个家的位置是最近解锁起飞的位置。
Land(着路)
飞机将会着路在当前位置或者提供的经纬度坐标位置,这个任务相当于着路模式。
Delay(延迟)
在预定时间或绝对时间内,飞机将会保持在原地。第一栏中“second”就是延迟时间(s),如果设置-1应该是无效的,“hour UTC”,“minute UTC”and“second UTC” 区域用来设置绝对时间。例如我们可以设在1:30pm起飞,注意小时和分钟设置区域设置为-1是无效的。
Condition-Delay(条件延迟)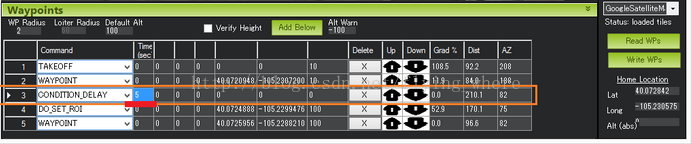
这个延迟命令是延迟到下一个“DO”命令开始,在图例子中,Do-Set-Roi指令被延迟以至于5s后飞机开始经过航路点2,注意:这个指令不终止飞机飞行,也应该注意:这个延迟时间执行的条件是下一个航路点到达。因此如果“DO”没有产生条件时间延长也是不会执行的。
Time:是执行下一个“DO”延迟的时间。
Condition-Distance条件距离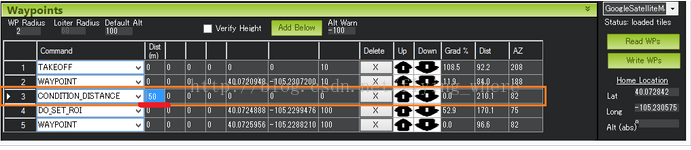
飞机在离下一个航路点的预定距离时开始执行“DO”指令,在上图的例子中,指令4被延迟以至于一旦飞机距离航路点5只有50米时开始执行延迟,注意:这个指令不会使飞机停止或在任务期间终止,它仅仅影响“DO”命令。Dist栏就是设置距离(米)。
Condition-Yaw(条件航向)
飞机机头指向预定的方位数。
Deg:当rel/abs为0时表述的是飞机机头朝向,当rel/abs为1时飞机的航向是就是一个变化量。
Dir:为1(顺时针),-1(逆时针),航向被预定时使用这个,预定的航向是操控员从当前的航向上增加或者减少去计算目标航向。无论是航向增加还是减少,飞机都将快速的转向新目标的航向。
Rel/abs:允许设定相对航向“0”和绝对向航“1”
Do-Jump
跳转到预定次数的预定任务之前继续这个任务。在上图例子中,飞机在飞向航路点4之前先要在航路点1和2之间飞行3次。
WP:任务指令跳转
Repeat:跳转的最大次数,1代表始终跳转。
不管这个名字,Do-jump是个“nav”命令而不是“DO”命令,因此带条件的命令像CONDITION_DELAY不会影响DO-jump指令,它一旦满足那样的指令就会执行Do-jump。注意:这里最大的次数是3,第四和第五十无效的命令,不会执行。支持版本3.1.5以上。
Do-Change-Speed
改变飞机水平目标速度(m/s)。
注意:3.1.5和更早版本速度改变仅在导航命令执行完了起作用,从3.2开始改变速度将会立即执行。
更多的设置信链接息请参考http://ardupilot.org/copter/docs/common-planning-a-mission-with-waypoints-and-events.html#common-planning-a-mission-with-waypoints-and-events(怎么加载航路点和事件)。

若有收获,就点个赞吧
0 人点赞
