- 需遵循国际文物保护规定的“最小干预”原则
- 技术
- 利用文物三视图的三维模型建模方法
- 参考文献
- 基于VR的古陶瓷文物建模与逆向修复技术数字化探析 (2012)
- 技术路线
- 三维建模
- 纹理重建
- 材质调制
- Vray
- Fresnel:菲尼尔反射
- 纹理贴图
- 计算机图形学中的纹理映射技术
- 材质调制
- 参考文献
- 三维激光扫描测量技术 (能够完整复制古文物的材料、形状、色调 及装饰等基本信息)利用三维扫描仪直接扫描获取三维模型,并对模型进行格式转换和三维重建
- 地面激光扫描(常用于土木建筑领域,属于三维激光扫描的一种)
- 参考文献
- 地面Lidar在文物测量建模中的应用 (2011)
- 基 于 Cyclone 软 件 在 文 物 三 维 建 模 中 的 应 用(2011)
- 参考文献
- 三维扫描仪
- 三维扫描仪的制作并非仰赖单一技术,各种不同的重建技术都有其优缺点,成本与售价也有高低之分。目前并无一体通用之重建技术,仪器与方法往往受限于物体的表面特性。例如光学技术不易处理闪亮(高反照率)、镜面或半透明的表面,而激光技术不适用于脆弱或易变质的表面。
- 三维扫描仪的用途是创建物体几何表面的点云(point cloud),这些点可用来插补成物体的表面形状,越密集的点云可以创建更精确的模型(这个过程称做三维重建)。若扫描仪能够获取表面颜色,则可进一步在重建的表面上粘贴材质贴图,亦即所谓的材质印射(texture mapping)。
- 三维扫描仪可类比为照相机,它们的视线范围都呈现圆锥状,信息的搜集皆限定在一定的范围内。两者不同之处在于相机所抓取的是颜色信息,而三维扫描仪测量的是距离。由于测得的结果含有深度信息,因此常以深度图像(depth image)或距离图像(ranged image)称之。
- 由于三维扫描仪的扫描范围有限,因此常需要变换扫描仪与物体的相对位置或将物体放置于电动转盘(turnable table)上,经过多次的扫描以拼凑物体的完整模型。将多个片面模型集成的技术称做视频配准(image registration)或对齐(alignment),其中涉及多种三维比对(3D-matching)方法。
- 参考文献
- 基于计算机辅助设计的文物数字化方法研究 (2017)
- 技术路线(三维扫描系统)
- 数据采集(三维激光扫描仪)
- 扫描系统获取的是三维点 云数据,采用的是三维坐标,三维激光扫描仪单束激光 发射和反射采集获取被扫描物的测距值 S ,同时编码器 同步测量该束激光的方位角 β 和俯仰角 α ,并计算出三维激光点 P 的坐标值 。被扫描 物体由若干个 pn 点构成,三维扫描仪通过高速发射激 光束,可以快速获取被扫描物体点云数据。
- 文物三维扫描的过程中,需要确立三维扫描的视 点,每一个视点获取的三维点云数据根据扫描精度的不 同差别较大,但总体数据量非常庞大。被扫描物体往往 需要建立 3 个以上,大型场景往往会达到几十个视点, 这些视点获取的扫描点云相对于视点本身是局部坐标, 需要将各个视点的点云数据进行拼合,才能准确获得物体的完整坐标数据
- 信息预处理(数据处理软件:如 VC++和 ARX 工具)
- 在进行各视点数据拼合之前,需要将各视点的点云数据进行压缩和去噪处理,利用多边形细分理念,对于某一视点的三维点云区域内的 M × N 点
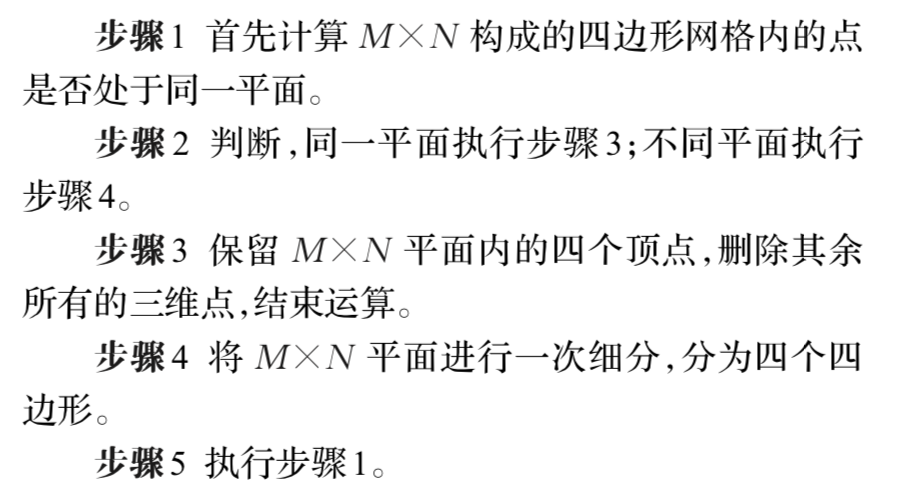
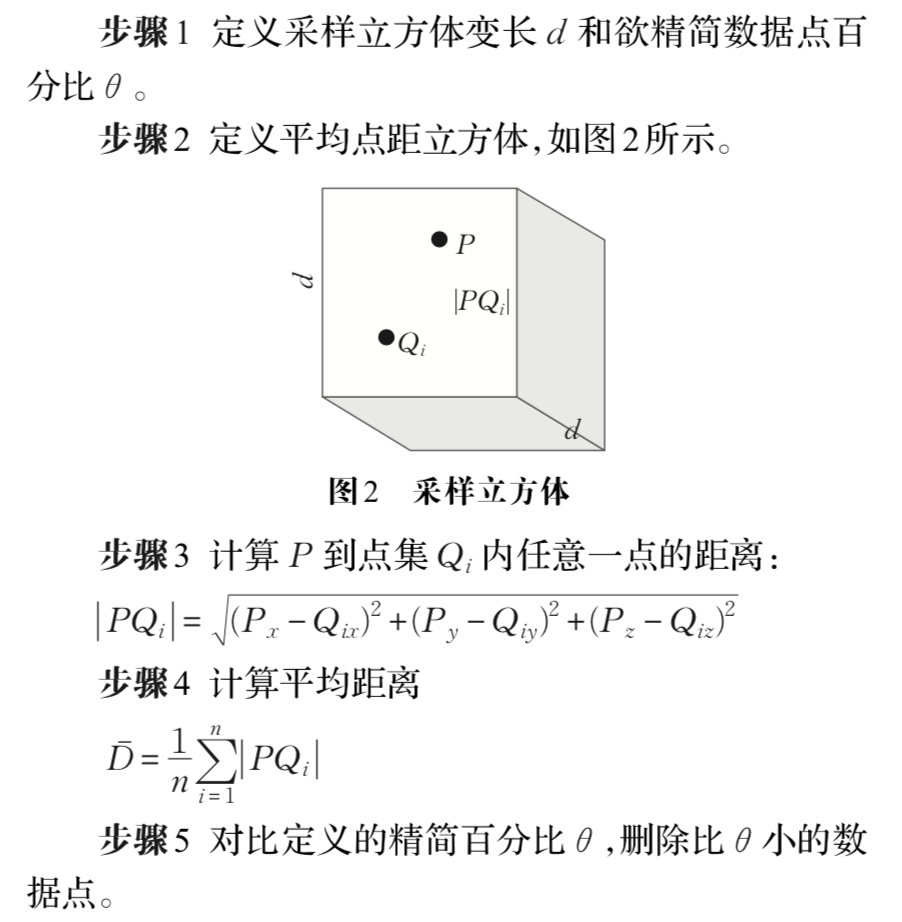
- 在进行多边形细分压缩的过程中,如何判断被扫描 物体的点云数据去噪合适,需要根据平均距值原理。三 维物体的点云密度越大,采样点之间的平均距值就越 小,根据扫描物体的具体要求和用途,采用平均距值原 理,只需要判断采样点之间的平均距值大小,从而决定 是否需要删除多余的点云数据,进行扫描物体的点云数 据压缩。
- 在实际的研究工作中发现,除非实验环境非常标准和严格,不然在进行文物扫描的过程中,被扫描物体一定范围之内的其他物体也会被同时扫描,而且一些特定的文物场合没有办法对文物进行移动和清理,因此,需要在获取三维扫描数据里去除无关的扫描物体数据。
- 同时,去除无关数据的时候,由于被扫描物体表面视点的干扰和遮挡,会造成扫描物体产生空洞数据,这类空洞数据的修补采用两种方法
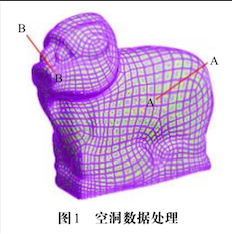
- 线性插值
当修补数据出现在平面区域 - B 样条线曲面插值法
如果修补数据出现在曲面空间 - 空洞数据的出现与扫描方式和文物表面特征密切相关,采用多次扫描和数据配准会较好地处理这类空洞数据
- 线性插值
- 在进行各视点数据拼合之前,需要将各视点的点云数据进行压缩和去噪处理,利用多边形细分理念,对于某一视点的三维点云区域内的 M × N 点
- 数据重建(计算机辅助系统:如MAYA、3Dmax)
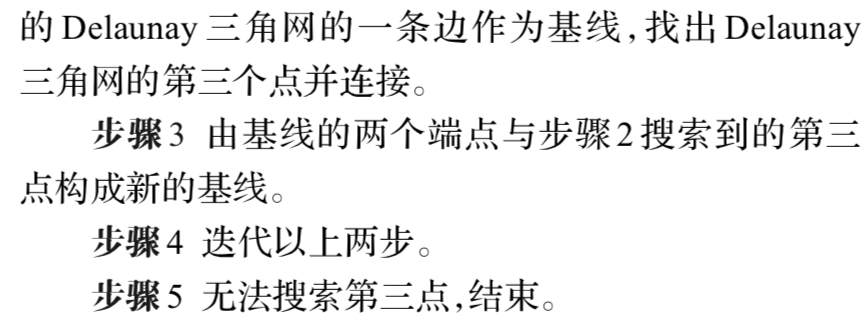
- 计算机辅助设计软件系统是基于 三角网格或四角网格的三维模型构建方法,因此文物数据的三维模型重建采用三角刨分原理的三角网格生长法,这样能够很好地耦合三维模型软件,例如 Maya、3D MAX 等进行视觉化的呈现,并且文物数字化的特征是 高精度的还原,需要对重建之后的三维模型进行匹配修 改。三角网格生长法的基本步骤如下

- 模型的纹理映射
- 由于文物数字化处理的特殊性,在数理算法映射的 基础上,结合计算机辅助软件的人工的多重纹理贴图, 利用专业的三维图形软件,例如3d MAX、Maya等进行 人工交互处理,将文物的高精度图片贴到文物三维模型 上。借鉴透视投影成像原理,利用三维扫描透视投影模 型,将文物的网格模型与图像标记点进行匹配,使文物 网格模型坐标变换到所拍摄图像的摄像机坐标系,生成 文物的二维色彩图像,从而进行文物的图像与模型之间 的纹理映射,详细步骤如下所示
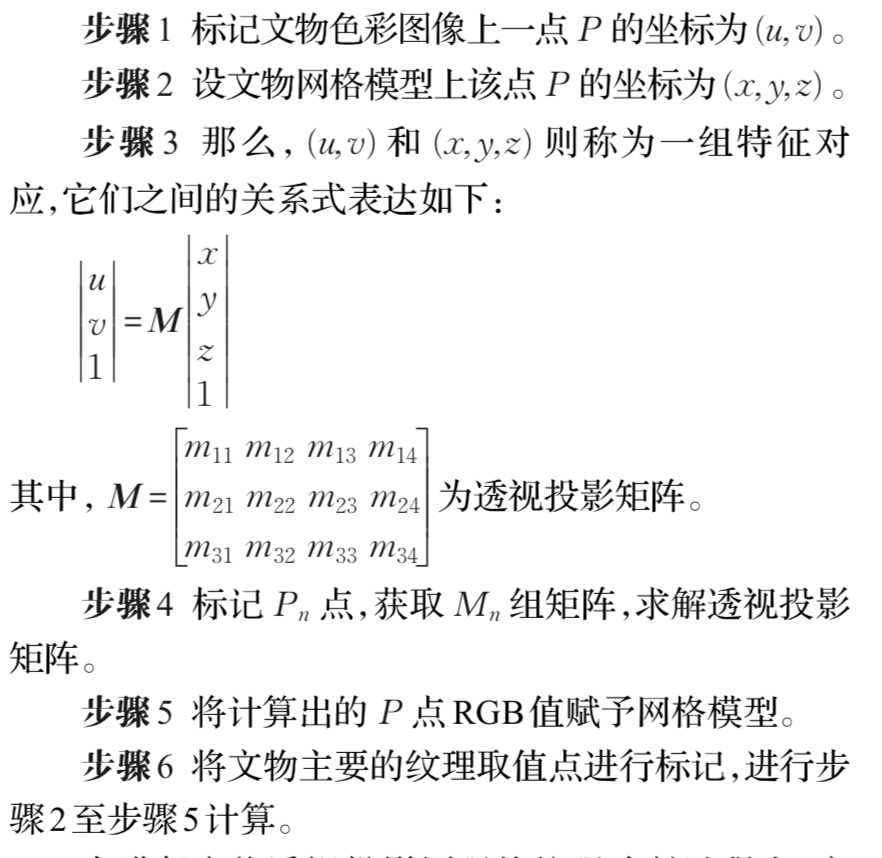
- 在进行文物透视投影原理的纹理映射过程中,文物的数字模型色彩纹理效果与标记点取值有关,标记点越多效果越好,但计算量会急剧加大。因此,在实际的文物数字化实验中,采取数值计算和人工贴图相结 合的方法
- 由于文物数字化处理的特殊性,在数理算法映射的 基础上,结合计算机辅助软件的人工的多重纹理贴图, 利用专业的三维图形软件,例如3d MAX、Maya等进行 人工交互处理,将文物的高精度图片贴到文物三维模型 上。借鉴透视投影成像原理,利用三维扫描透视投影模 型,将文物的网格模型与图像标记点进行匹配,使文物 网格模型坐标变换到所拍摄图像的摄像机坐标系,生成 文物的二维色彩图像,从而进行文物的图像与模型之间 的纹理映射,详细步骤如下所示
- 计算机辅助设计软件系统是基于 三角网格或四角网格的三维模型构建方法,因此文物数据的三维模型重建采用三角刨分原理的三角网格生长法,这样能够很好地耦合三维模型软件,例如 Maya、3D MAX 等进行视觉化的呈现,并且文物数字化的特征是 高精度的还原,需要对重建之后的三维模型进行匹配修 改。三角网格生长法的基本步骤如下
- 数据采集(三维激光扫描仪)
- 技术原理
- 三维扫描技术的基本原理是利用激光三角测距原理,通过发射出的水平激光束扫描物体,并接受物体表面的反射激光束,采集帧数据,计算和统计采样点的水平投影距离,利用统计数据重构采样点的三维坐标还原被扫描模型。
- 地面激光扫描(常用于土木建筑领域,属于三维激光扫描的一种)
- 结构光测量结构光是一组由投影仪和摄像头组成的系统结构。用投影仪投射特定的光信息到物体表面后及背景后,由摄像头采集。根据物体造成的光信号的变化来计算物体的位置和深度等信息,进而复原整个三维空间。(应该也是激光)
- 硬件:https://www.jianshu.com/p/4365145add77 *
- 参考文献
- Three-dimensional imaging based on Gray-code light projection characterization of the measuring algorithm and development of a measuring system for industrial applications (1997)*
- 基于结构光测量的文物数字化方法(2009)
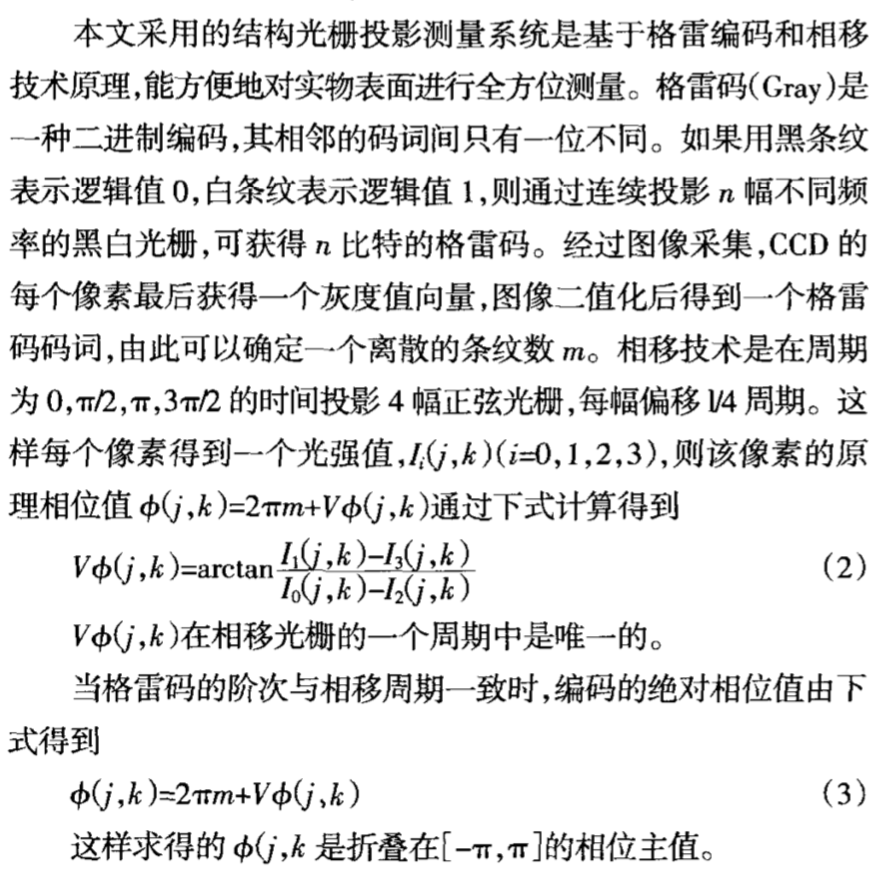
基于格雷编码和相位移动技术原理的结构光栅投影扫描技术和 CCD成像技术
- 测量
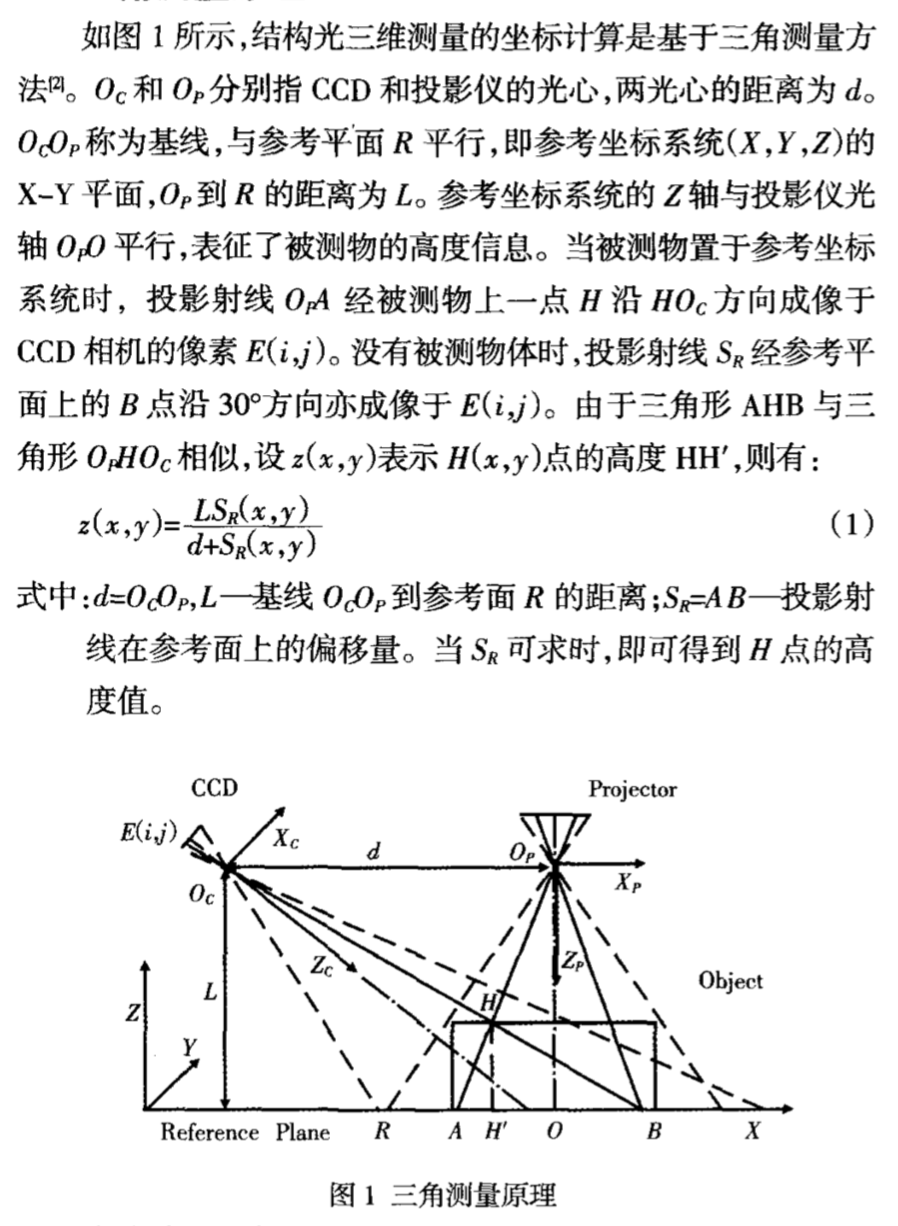
- 三角测量原理(利用相似三角形定律测物体高度)
- 结构光栅测量系统*
- 三角测量原理(利用相似三角形定律测物体高度)
- 三维数据预处理
- 数据精简及噪声去除
- 遗失数据补齐
- 多视数据配准*
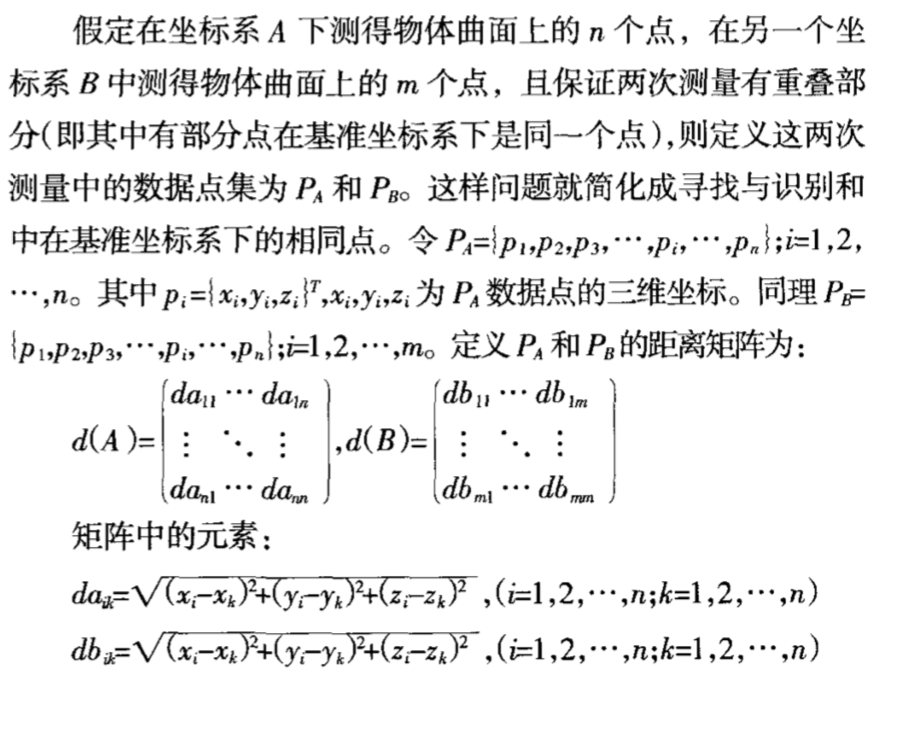
- 数据配准(Data Registration)的实质是将两个或两个以上坐标系中的大容量三维空间数据点集转换到统一坐标系中的数学计算过程。其具体过程为计算满足如下目标函数的旋转和平移变换矩阵R、T
- 快速定位基准点算法*
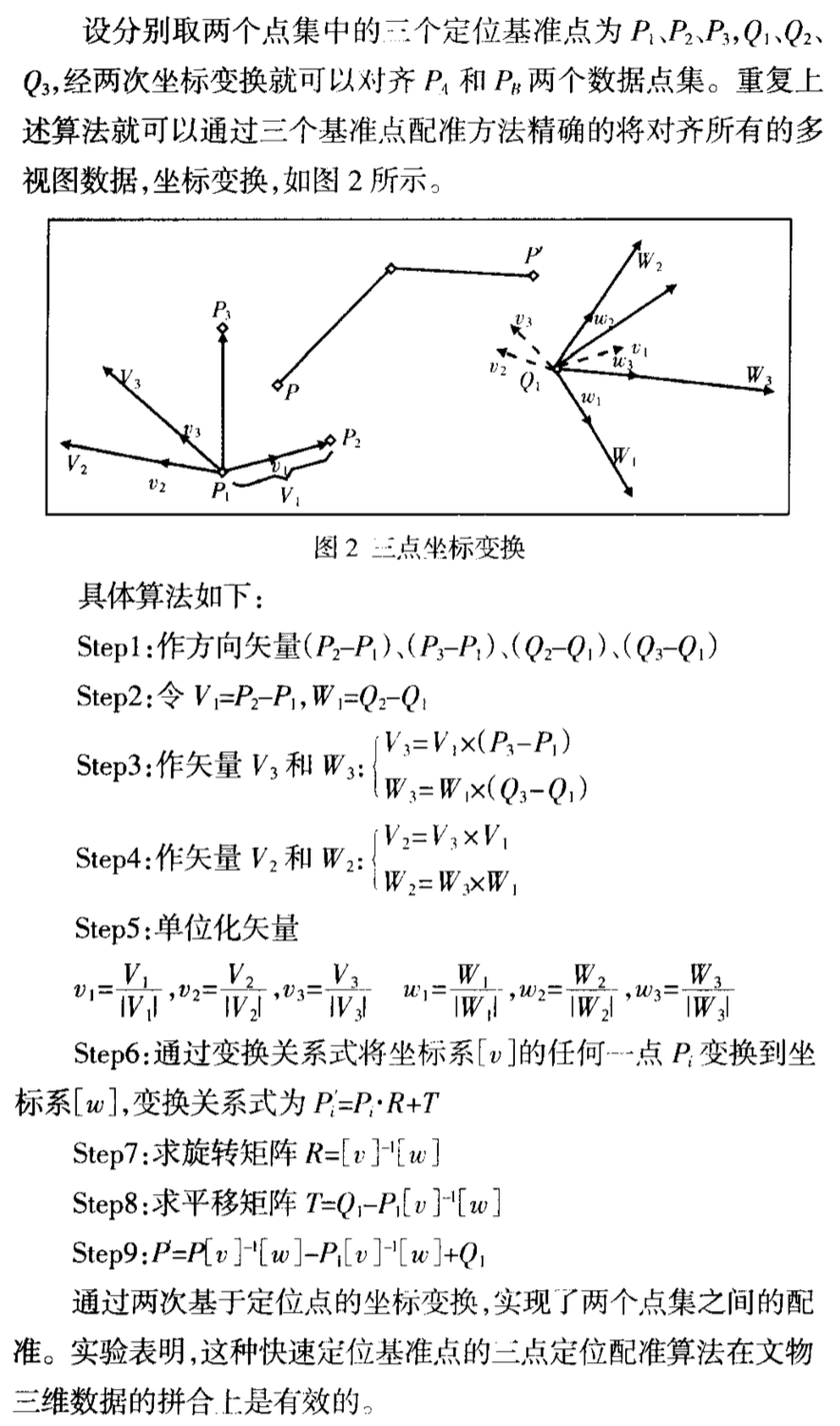
- 三点定位配准算法*
- 数据配准(Data Registration)的实质是将两个或两个以上坐标系中的大容量三维空间数据点集转换到统一坐标系中的数学计算过程。其具体过程为计算满足如下目标函数的旋转和平移变换矩阵R、T
- 三维网格化及曲面重构
- 采用网格三角化方法将点云生成三角曲面片网格模型,再采用三角Bezier曲面拟合的方法构造曲面,这种曲面构造方法具有构造灵活、适应性好等特点,能充分满足文物数字化的特殊要求。
- 3D高清摄影
- 3D高清摄影在文物建模及虚拟修复中的应用研究 ——以马口窑瓷器为例(2015)(讲了优于3D激光扫描的方面)
- 基于 X 射线的工业化 CT 扫描方法
- 建筑信息模型技术(BIM)
- 基于点云的历史文物建筑 BIM 建模应用 (2019)
- 利用文物三视图的三维模型建模方法
- 硬件
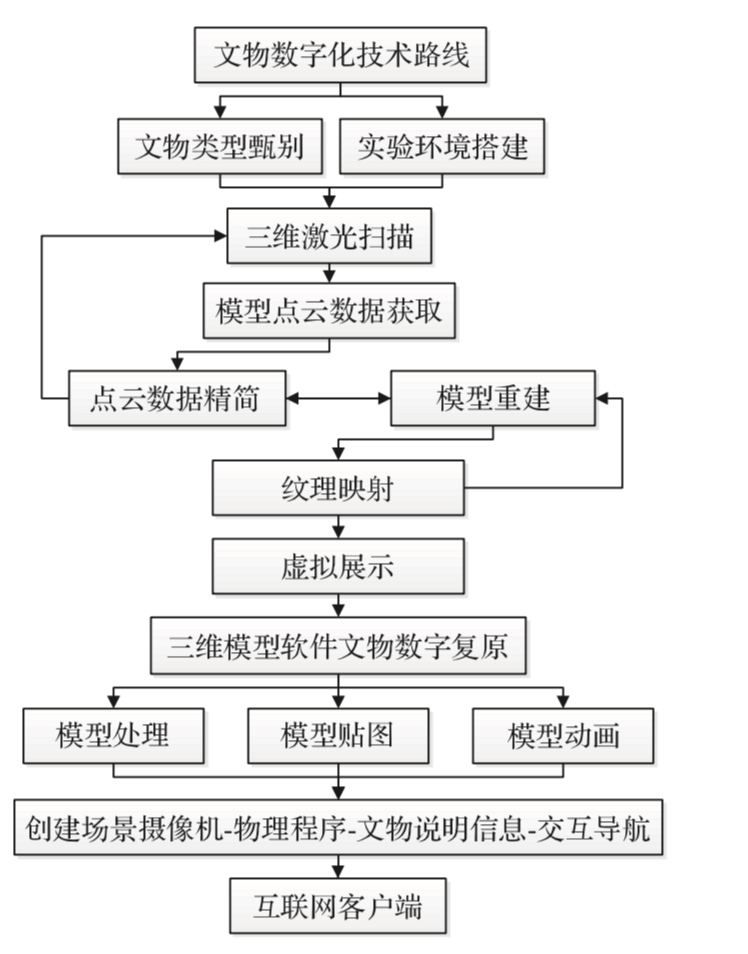
- 文物数字化技术路线
- 3D成像方法 https://blog.csdn.net/tyfwin/article/details/89110067*

若有收获,就点个赞吧
0 人点赞
