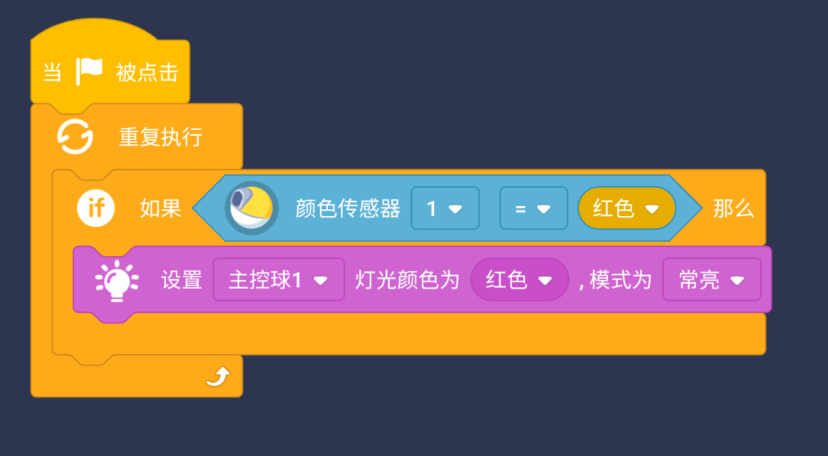
1、颜色传感器(1)(=)(黑色)
- 当指定的颜色传感器检测到的颜色=或≠指定的颜色时,条件成立
- 8种颜色:黑、蓝、绿、黄、红、白、紫、橙

2、获取颜色传感器(1)(环境光)的值
获取颜色传感器的值,包括环境光、反射光、颜色识别
颜色传感器包含3种检测模式环境光、反射光、颜色识别: 1)环境光:测量周围环境的光照强度,返回的是0-100,0(极暗),100(极亮),值越大,代表越亮 2)反射光:可以在白色屏幕上识别到黑线位置,返回的值为0-100,0(纯白),50(一边白,一边黑),100(纯黑) 3)颜色识别:返回1-8的值,分别代表:1(黑)、2(蓝)、3(绿)、4(黄)、5(红)、6(白)、7(紫)、8(橙)

举个例子:
实时获取颜色传感器的值,赋值到我的变量,并显示在舞台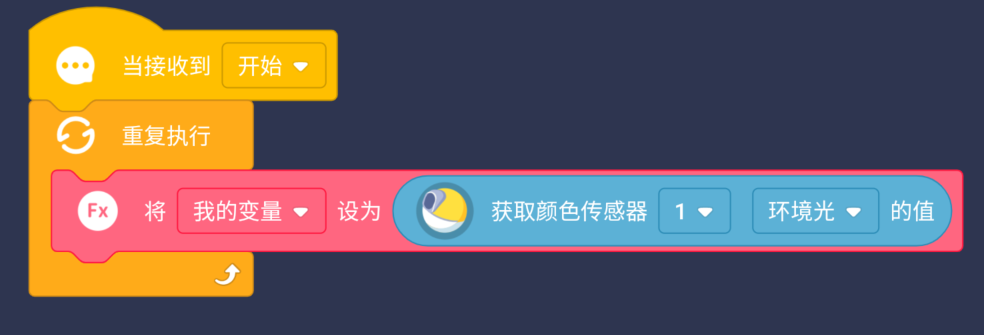
3、红外传感器(1)(≤)(5)cm
当红外传感器的值≥或≤某个值后,条件成立
举个例子:
当接收到开始的时候,如果红外传感器距离小于5,降低旋转功率,如果大于10,增大旋转功率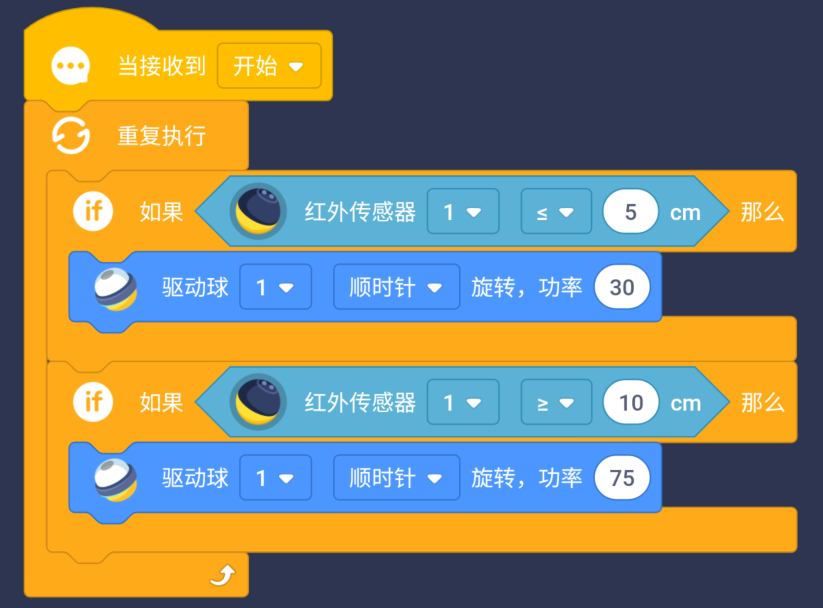
4、获取红外传感器(1)的值
获取红外传感器的值(5-15)cm
举个例子:
当接收到开始时,实时获取红外传感器的值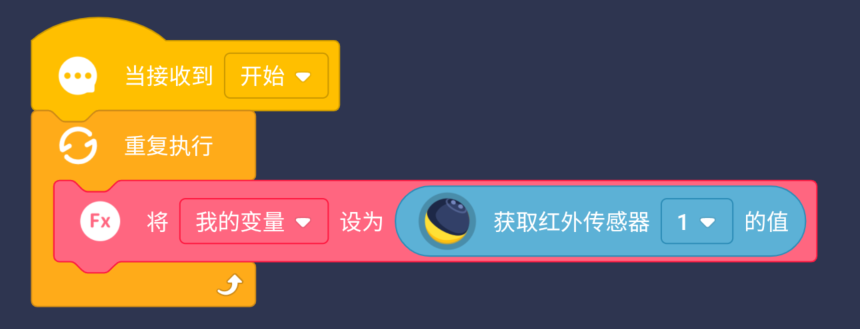
4、陀螺仪的(俯仰角度)(≤)(0)
- 当陀螺仪的俯仰角度、旋转角度、翻滚角度其中一个值≥或≤某个值后,条件成立
- 3种角度:俯仰角度、旋转角度、翻滚角度(-180° 到 180°)
- 陀螺仪位于主控球上

举个例子:
当陀螺仪的俯仰角度≤-50°,亮红灯,停止驱动球运动
5、重置陀螺仪角度
重新将陀螺仪的角度重置为零,一般常用在初始化的时候,重新初始化陀螺仪的角度
举个例子:
当触碰传感器按下时,重置陀螺仪角度,等待重置成功,驱动球开始亮绿灯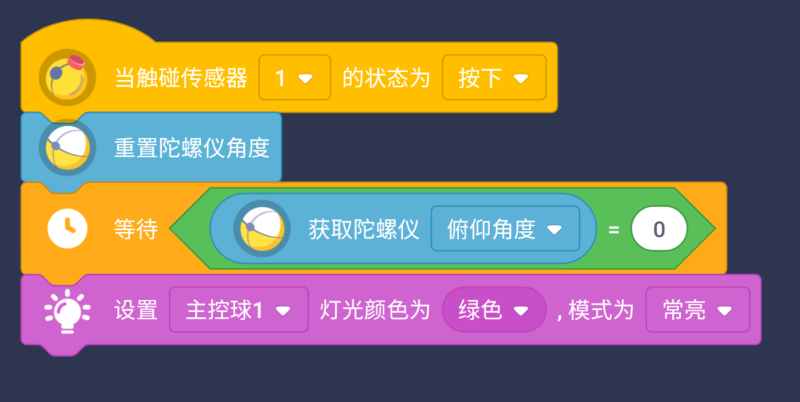
6、获取陀螺仪(俯仰角度)的值
- 获取陀螺仪俯仰角度、旋转角度、翻滚角度的值(-180° 到 180°)
- 陀螺仪位于主控球上

举个例子:
实时获取陀螺仪的俯仰角度,赋值到我的变量,并显示在舞台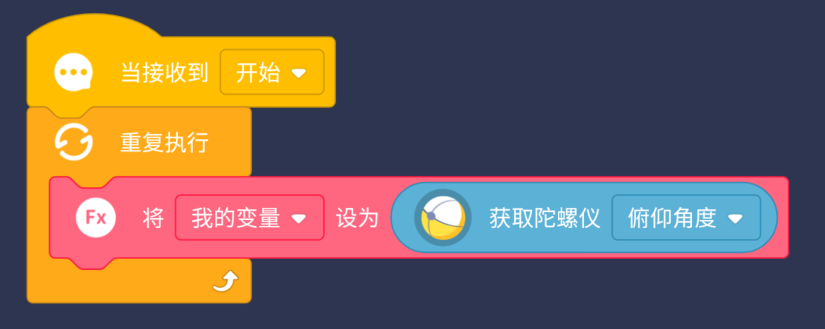
7、获取颜色传感器(1)(环境光)的值
获取颜色传感器的值,包括环境光、反射光、颜色识别
颜色传感器包含3种检测模式环境光、反射光、颜色识别: 1)环境光:测量周围环境的光照强度,返回的是0-100,0(极暗),100(极亮),值越大,代表越亮 2)反射光:可以在白色屏幕上识别到黑线位置,返回的值为0-100,0(纯白),50(一边白,一边黑),100(纯黑) 3)颜色识别:返回1-8的值,分别代表:1(黑)、2(蓝)、3(绿)、4(黄)、5(红)、6(白)、7(紫)、8(橙)

举个例子:
实时获取颜色传感器的值,赋值到我的变量,并显示在舞台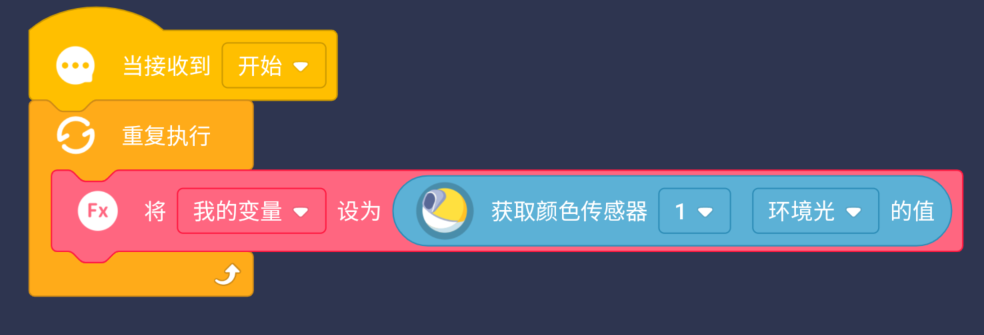
8、触碰传感器(1)的状态为(按下)
当触碰传感器按下或释放的时候,条件成立
举个例子:
当触碰传感器按下后,灯光开始亮红灯,释放后停止灯光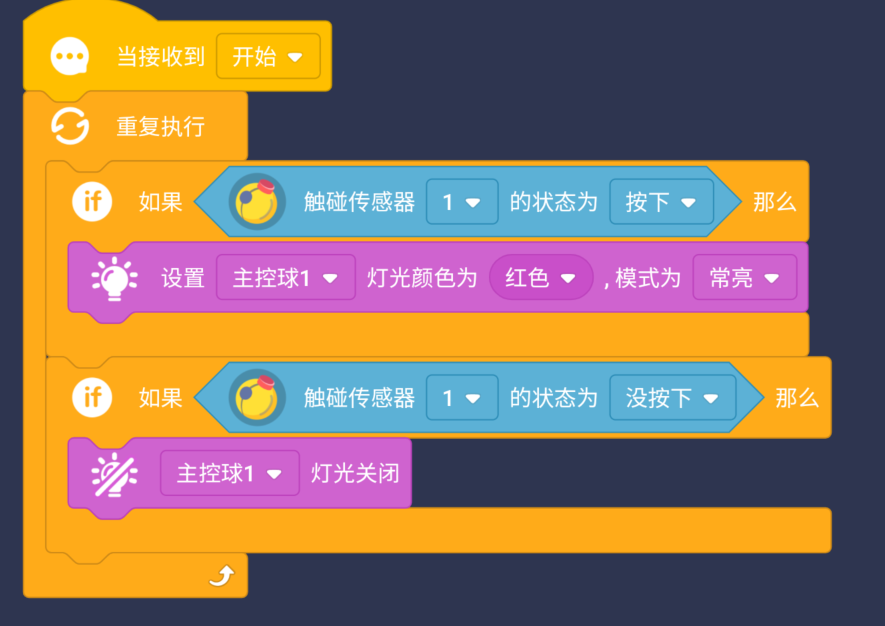

若有收获,就点个赞吧
0 人点赞
