介绍
通过颜色传感器的反射光值,判断当前机器人是否碰到黑线,从而让驱动球做出对应的动作,实现机器人跟随黑线运动的功能。
单光感巡线的原理
巡线主要是使用一个颜色传感器,利用黑线与白色区域反馈的光感值的不同进行巡线的,主要原理是通过实时监控颜色传感器的反射光的值,判断机器人是需要左转还是右转,或者直接前进,如图所示: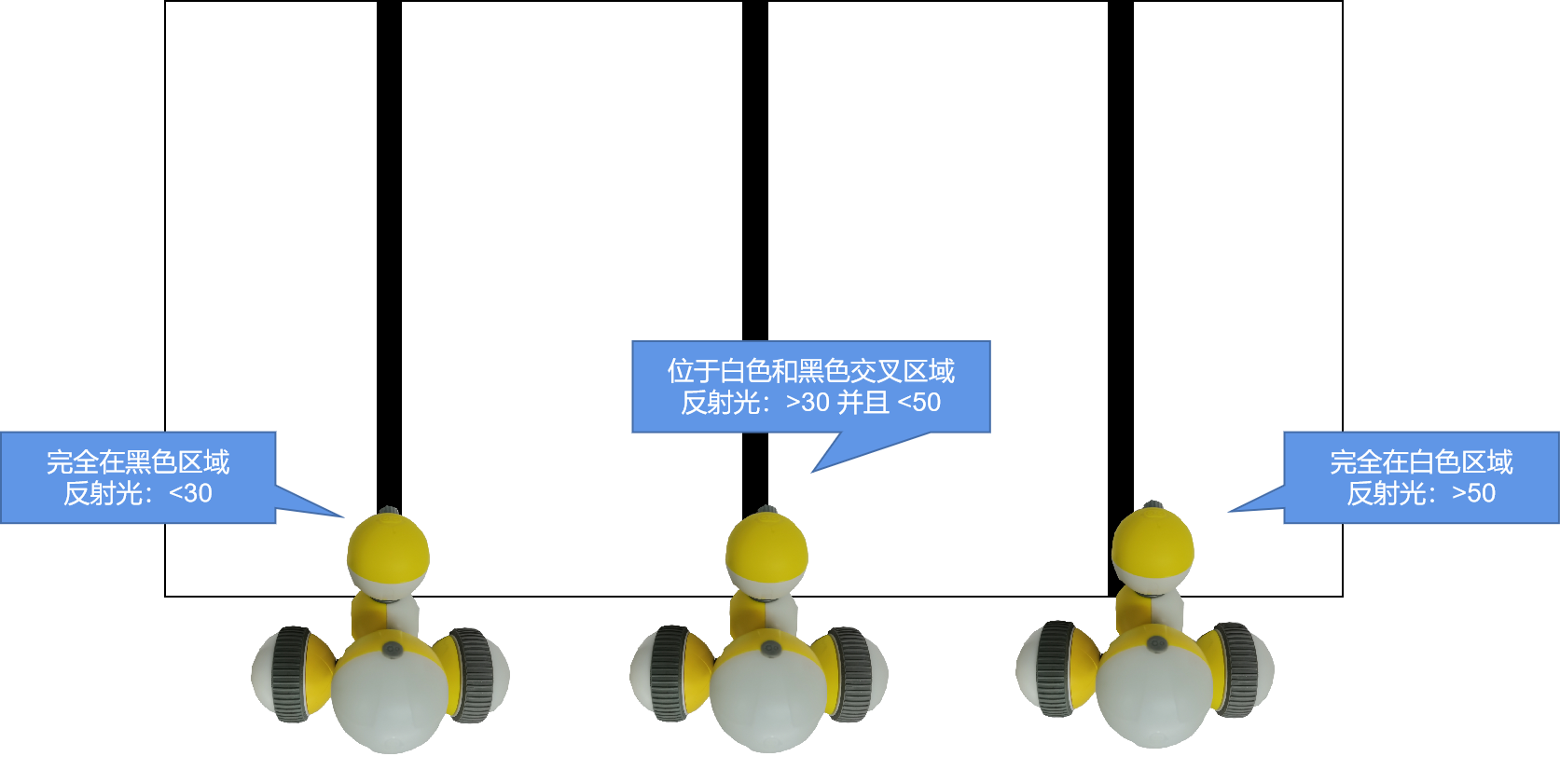
备注:以上数值并非绝对,实际上根据现场环境的光照强度,数值可能会有波动需要自行测试调整到合适的数值范围
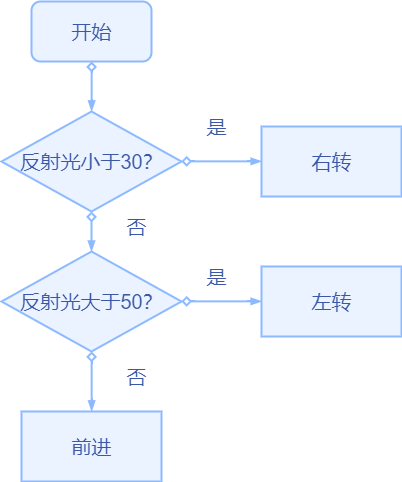
巡线的流程设计
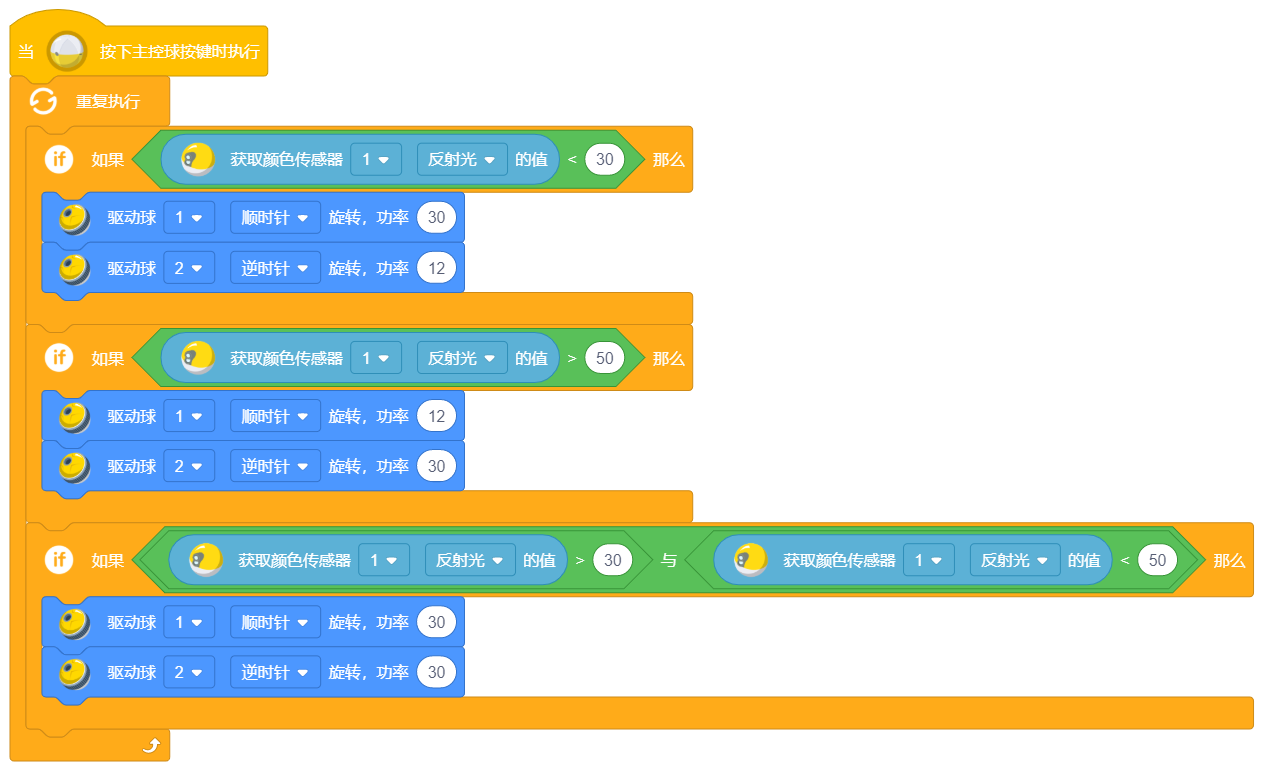
代码参考
下载代码

(点击图片下载或扫码下载)

若有收获,就点个赞吧
0 人点赞
