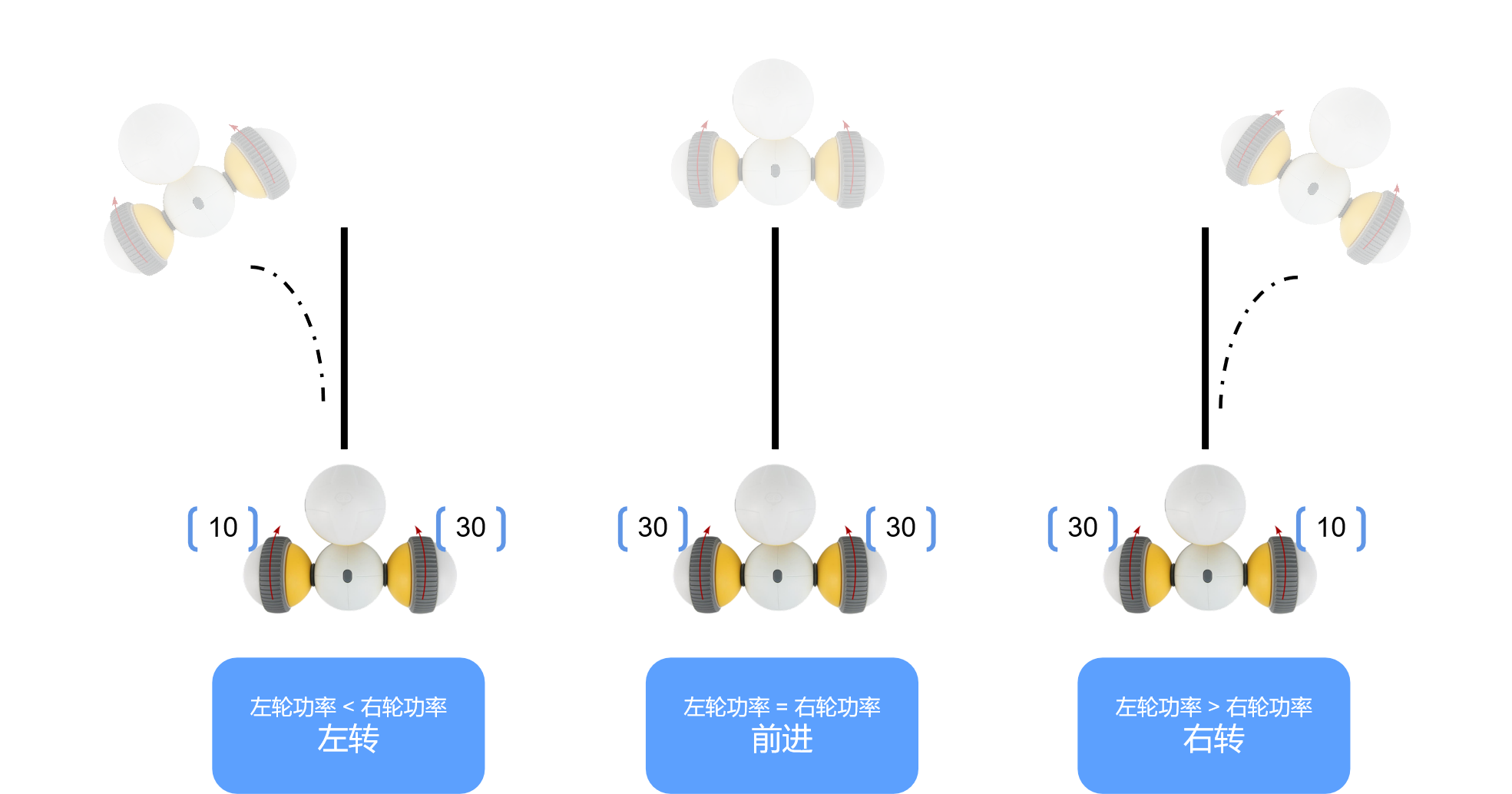
Mabot的移动主要是靠驱动球作为驱动,其中通过分别控制两个轮子的功率,可实现不同方向的移动。 如果要让 Mabot 左转可以设置右轮的功率/速度大于左轮如果要让 Mabot 右转可以设置左轮的功率/速度大于右轮如果要让 Mabot 后退可以设置左轮逆时针转动,右轮顺时针转动,并且时间和功率一样