model.py
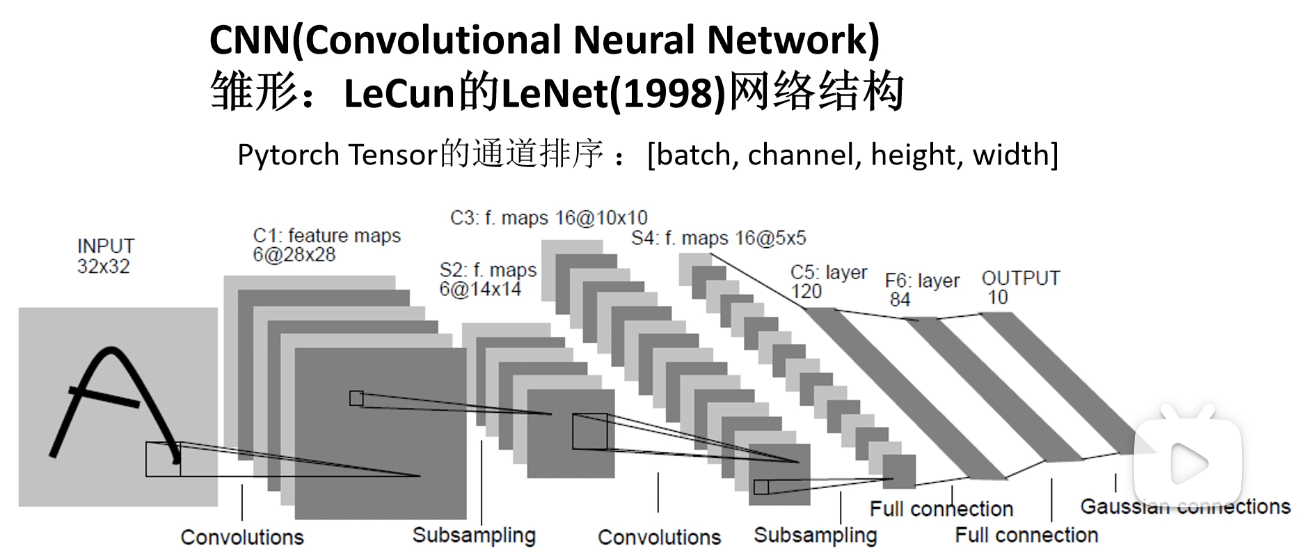
import torch.nn as nnimport torch.nn.functional as Fclass LeNet(nn.Module):def __init__(self):super(LeNet, self).__init__()self.conv1 = nn.Conv2d(3, 16, 5)self.pool1 = nn.MaxPool2d(2, 2)self.conv2 = nn.Conv2d(16, 32, 5)self.pool2 = nn.MaxPool2d(2, 2)self.fc1 = nn.Linear(32*5*5, 120)self.fc2 = nn.Linear(120, 84)self.fc3 = nn.Linear(84, 10)def forward(self, x):x = F.relu(self.conv1(x)) # input(3, 32, 32) output(16, 28, 28)x = self.pool1(x) # output(16, 14, 14)x = F.relu(self.conv2(x)) # output(32, 10, 10)x = self.pool2(x) # output(32, 5, 5)x = x.view(-1, 32*5*5) # output(32*5*5)x = F.relu(self.fc1(x)) # output(120)x = F.relu(self.fc2(x)) # output(84)x = self.fc3(x) # output(10)return x
train.py
transforms.ToTensor()
Converts a PIL Image or numpy.ndarray (H x W x C) in the range [0, 255] to a torch.FloatTensor of shape (C x H x W) in the range [0.0, 1.0]transforms.Normalize()
Normalize a tensor image with mean and standard deviation.Given mean: (M1,...,Mn) and std: (S1,..,Sn) for n channels, this transform will normalize each channel of the input torch.*Tensor i.e. input[channel] = (input[channel] - mean[channel]) / std[channel]
.. note::
This transform acts out of place, i.e., it does not mutates the input tensor.
Args:
mean (sequence): Sequence of means for each channel.
std (sequence): Sequence of standard deviations for each channel.
inplace(bool,optional): Bool to make this operation in-place.
optimizer.zero_grad()来将历史损失清零
如果不清除历史梯度,就会对计算的历史梯度进行累加(通过这个特性,可以实现一个很大batch数值的训练)
import torchimport torchvisionimport torch.nn as nnfrom model import LeNetimport torch.optim as optimimport torchvision.transforms as transformsdef main():transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])# 50000张训练图片# 第一次使用时要将download设置为True才会自动去下载数据集train_set = torchvision.datasets.CIFAR10(root='./data', train=True,download=False, transform=transform)train_loader = torch.utils.data.DataLoader(train_set, batch_size=36,shuffle=True, num_workers=0)# 10000张验证图片# 第一次使用时要将download设置为True才会自动去下载数据集val_set = torchvision.datasets.CIFAR10(root='./data', train=False,download=False, transform=transform)val_loader = torch.utils.data.DataLoader(val_set, batch_size=5000,shuffle=False, num_workers=0)val_data_iter = iter(val_loader)val_image, val_label = val_data_iter.next()# classes = ('plane', 'car', 'bird', 'cat',# 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')net = LeNet()loss_function = nn.CrossEntropyLoss()optimizer = optim.Adam(net.parameters(), lr=0.001)for epoch in range(5): # loop over the dataset multiple timesrunning_loss = 0.0for step, data in enumerate(train_loader, start=0):# get the inputs; data is a list of [inputs, labels]inputs, labels = data# zero the parameter gradientsoptimizer.zero_grad()# forward + backward + optimizeoutputs = net(inputs)loss = loss_function(outputs, labels)loss.backward()optimizer.step()# print statisticsrunning_loss += loss.item()if step % 500 == 499: # print every 500 mini-batcheswith torch.no_grad():outputs = net(val_image) # [batch, 10]predict_y = torch.max(outputs, dim=1)[1]accuracy = torch.eq(predict_y, val_label).sum().item() / val_label.size(0)print('[%d, %5d] train_loss: %.3f test_accuracy: %.3f' %(epoch + 1, step + 1, running_loss / 500, accuracy))running_loss = 0.0print('Finished Training')save_path = './Lenet.pth'torch.save(net.state_dict(), save_path)if __name__ == '__main__':main()

若有收获,就点个赞吧
0 人点赞
