
摇杆模块
Joystick
一、概述
摇杆模块包含一个十字摇杆,可以用在控制魔洛克机器人及Scratch舞台互动游戏等方面。本模块会根据用户的操作,在x轴和y轴分别输出代表位置的数值,用于编程自定义。本模块通过RJ11连接线将数值传输至Qmind系列主控板,连接主板上的黑色接口。
二、规格
| 工作电压 | 5V DC |
|---|---|
| 信号模式 | 2轴模拟输出 |
| 十字摇杆 | 由两个电位器及平衡环组成 |
| 模块尺寸 | 52 x 26 x 28 mm(长 x 宽 x 高) |
三、特性
a) 平衡环将摇杆位移分为水平移动(X)与竖直移动(Y),电路板上有丝印标记;
b) 模块的孔洞是与魔洛克金属平台连接使用,亦可以兼容乐高;
c) 模拟采集电位器电压来判断摇杆的推动位置;
d) 具有反接保护,电源反接不会损坏IC;
e) 支持 Arduino IDE 编程, 并且提供运行库来简化编程;
f) 支持Robobloq-APP/MyQode-PC图形化编程,适合全年龄用户
g) 使用RJ11接口连线方便,该模块可以链接Qmind系列主板任意黑色端口;
四、使用方法。
a) 装配。
模块有两个M4螺丝装配孔,可以将模块通过螺丝固定到魔洛克机器人金属平台,同时也兼容乐高体系圆孔插销。
b) 连线。
将此模块连接到Qmind系列主控板的任意黑色RJ11端口,如图: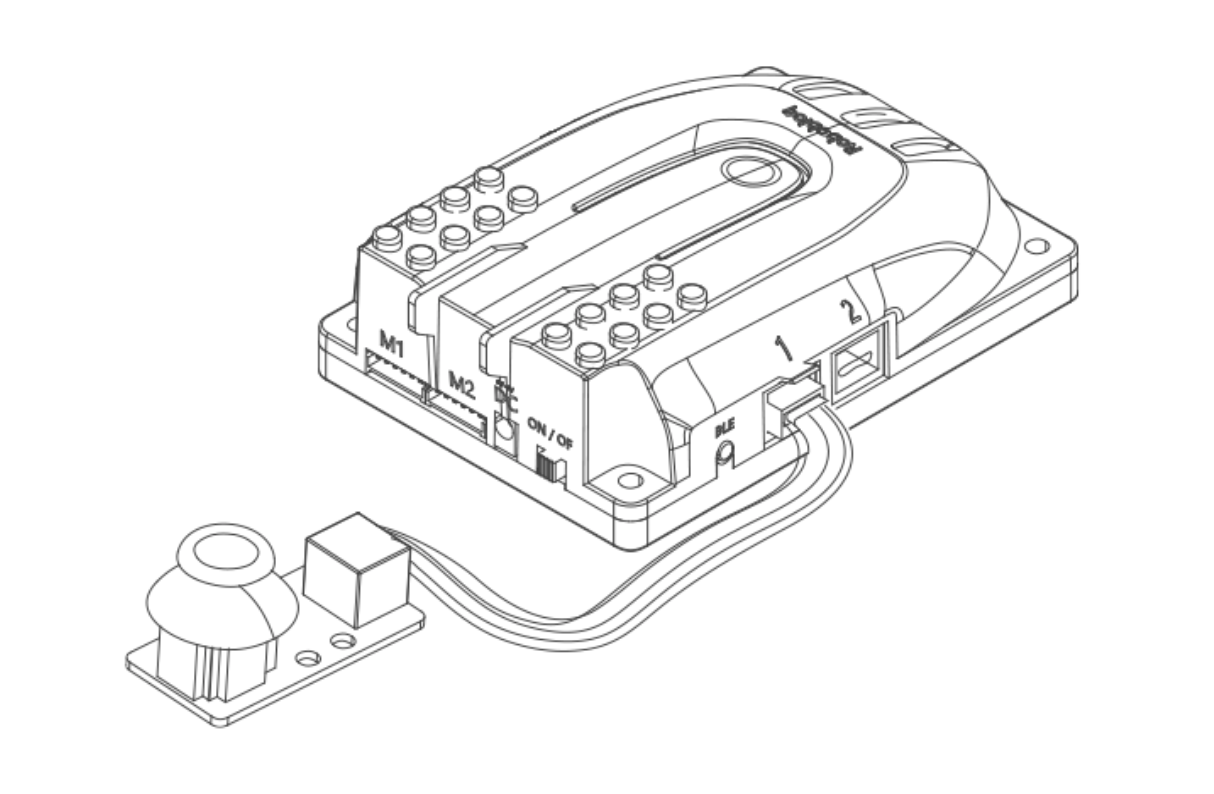
连接完成后在PC端会弹出连接的模块名称,在APP的控制台内亦可查对应端口。
c) 编程语句块
【舞台互动】PC端接入机器人,之后在角色Sprite内找魔洛克指令,点击每个语句块可以在线调试机器人,实时获得摇杆模块的返回值。(后期可直接在机器人角色内在线调试)
【在线及离线编程】摇杆模块语句块在“传感器”语句块内;
1.摇杆数值语句块
 |
参数一:端口 | 返回值 |
|---|---|---|
| Qmind范围1~3 Qmind plus范围2~7 |
可同时输出X轴、y值位置数值,范围正负480 |
2.摇杆状态判断语句块
 |
参数一:端口 | 返回值 |
|---|---|---|
| Qmind范围1~3 Qmind plus范围2~7 |
True或者 False |
d) 应用案例
【APP-Robobloq 传感器与机器人互动】
概述:当开机时,如果向左移动遥控摇杆,主控板灯亮蓝色,并会发出“滴滴滴”的声音,如果向右、向上、向下移动遥杆,主控板滴滴声会慢慢停止。
连接遥感模块到主控板3号口
设置如上图程序,先设置变量可以让程序运行更加顺畅。
按右下角运行键开始程序运行。
五、原理图

若有收获,就点个赞吧
0 人点赞
