Mirco:bit转接板
Mirco:bit Adapter

一、概述
micro:bit是一款由英国广播电视公司为青少年编程教育设计的入门级开发板。它支持微软开发的PXT图形化编程界面,无需额外下载编译器,可以在Windows,macOS, IOS, 安卓等多种操作系统下使用。
为了方便micro:bit 开发板接线,我们特别设计了这款扩展板。micro:bit 开发板全部引脚和电源均已引出到扩展板边上的排针上。
二、规格
| 输入电压 | DC 3.3V |
|---|---|
| 排针间距 | 2.54mm |
| 尺寸 | 696016mm |
| 重量 | 28.7g |
三、特性
a)支持Arduino IDE编程,并且提供运行库来简化编程;
b)支持Makecode的扩展应用Robobloq的编程,适合全年龄用户;
c)使用M4孔位安装,可兼容魔洛克金属平台和乐高圆孔;
d)同时使用RJ11接口连线方便,可用于Qmind系列主板上的任意黑色端口;
e)在机器人连接PC端成功之后会自动弹出传感器种类名称,同时可在Makecode端的控制台内看到魔洛克以及魔洛克相关的积木块。
四、使用方法
a) 装配
拥有八个安装孔,安装时注意金属件不可对电路板上面的元器件造成损坏或者造成短路。
注意的是在安装过程之中需要将microbit下图的形式摆放。
b) 连线
连入Qmind以及Qmind plus的黑色RJ11接口可以获得供电和通信。
建议:使用比较长的数据线连接microbit拓展板和魔洛克机器人。
c) 编程语句块
⦁ Micro:bit的编程语句块是在网页链接:https://makecode.micro:bit.org/#editor中,每个颜色对应不同的模块,想要找哪个模块,只要看哪个模块对应的颜色即可。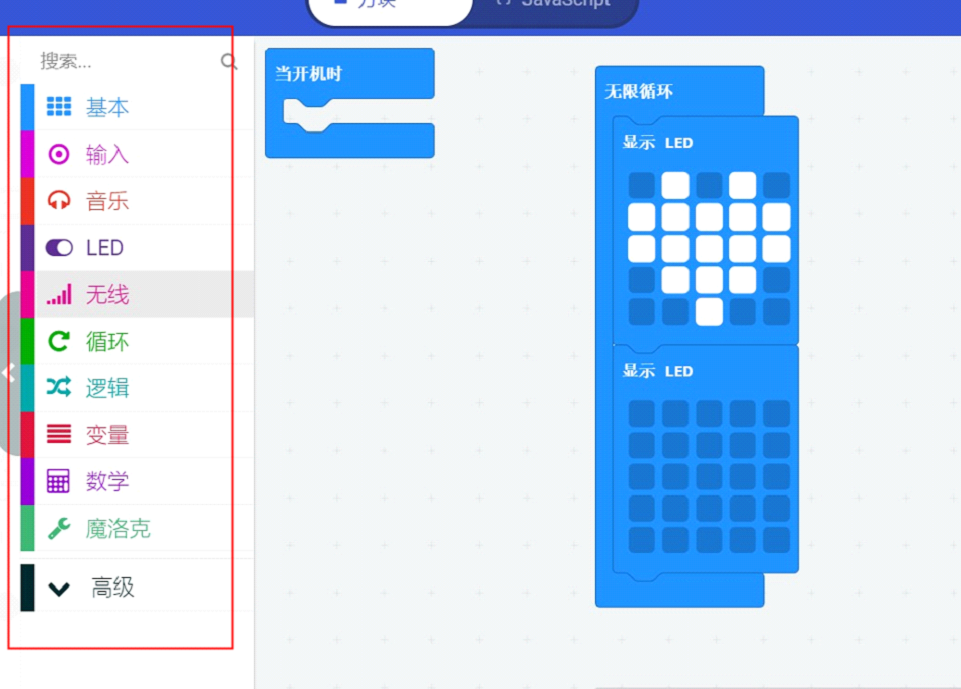
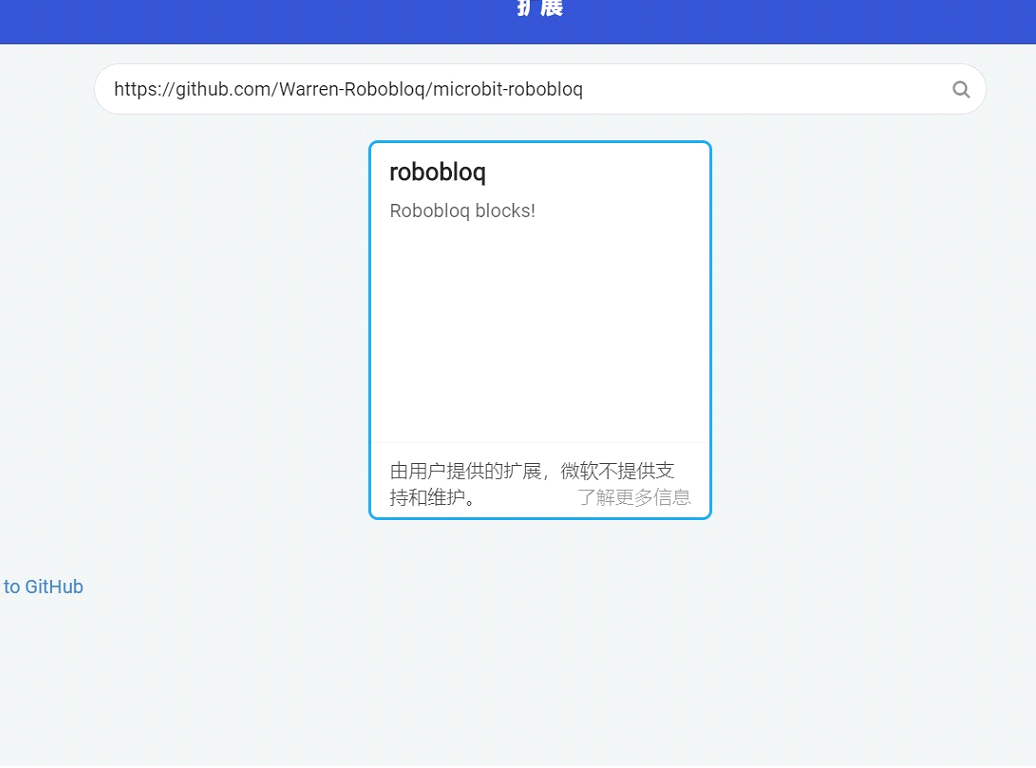
⦁ 如果想要找到魔洛克的语句块,可以点击“设置”里的“扩展”,然后输入https://github.com/Warren-Robobloq/microbit-robobloq,然后可以看到“魔洛克”的扩展模块,想要知道Robobloq机器人的其他模块参数,可以参考其他的电子模块说明书。
⦁ 如果想要让microbit驱动机器人运动,魔洛克机器人电机的取值范围是-99-99。

e) 应用案例
1.在案例过程之中,首先要先用USB连接micro:bit到makecode官方编辑器上:https://makecode.micro:bit.org/#editor,(需要注意的是,要在makecode编辑器端做好编程,然后就点击“下载”,把写好的程序hex文件上载到micro:bit(E)(注意因为每个电脑的接入外来设备个数的不同,盘符会发生变化))(更多详细的操作和疑问解答请看https://micro:bit.org/guide/quick/和https://makecode.micro:bit.org/faq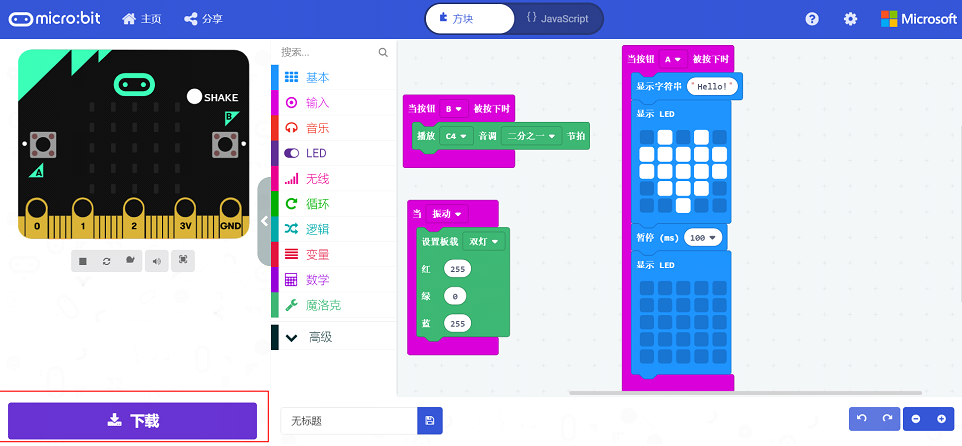
2.micro:bit是可以控制Qmind和Qmind Plus的。
3. 以Qmind Plus为例,micro:bit和Qmiond plus两个都是主控板,micro:bit起到主导性的作用。
Micro:bit → Qmind Plus → Qmind Plus所接的其他传感器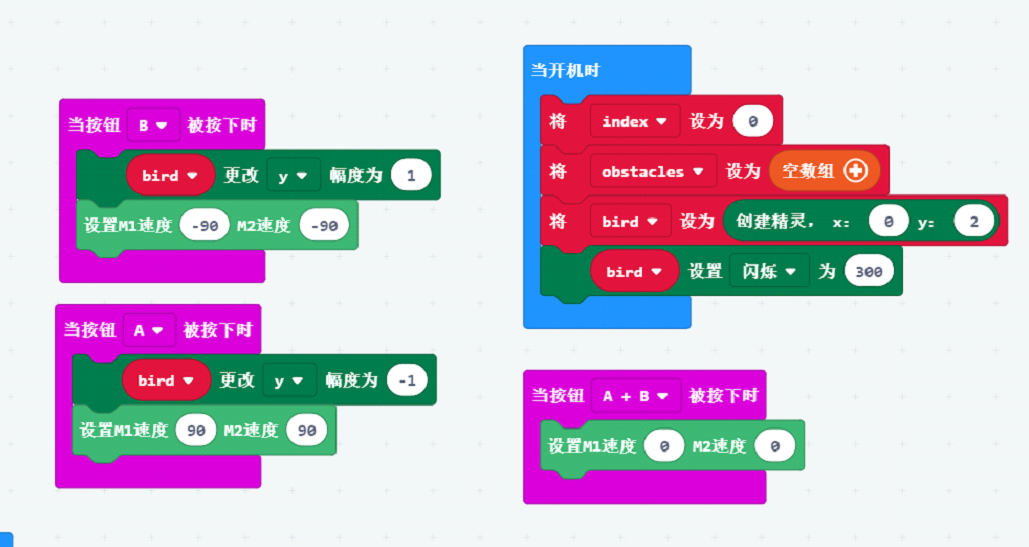


实现效果:
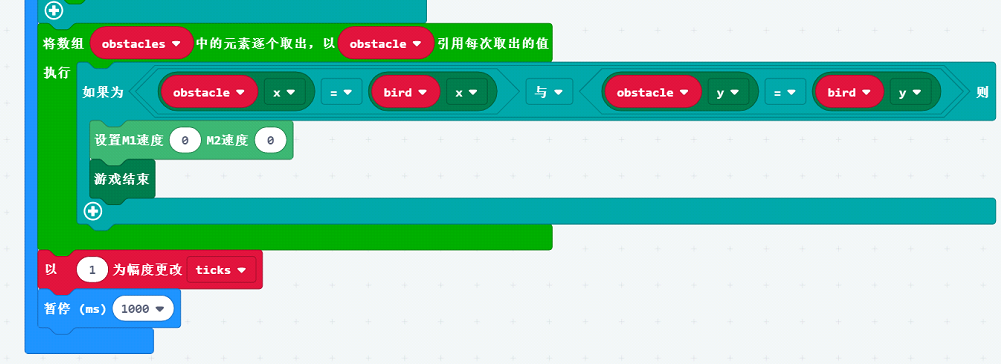
案例名称:如影随行
Microbit板子上展现的游戏就是flappy bird的游戏,用A、B按键分别操控bird上移或者下移来躲避随机出现的障碍,机器人也会同时随着小鸟的移动前进和后退,所以这个时候可以拿着microbit扩展版边走边跟着机器人的步伐玩游戏,如果机器人步伐太快,可以按下”A+B”键强行勒令机器人停止运动,如果玩家死了,机器人也会停止运动。
(进阶可忽略:参数方面:可以根据参数调整flapping bird 的反应速度时间,也就是整个游戏的难易度,注意的是,可以将参数的绝对值跳的稍微高点,这样机器人更容易实现后退,转弯。(这与电机的占空比部分因素相关))
建议:使用比较长的数据线连接microbit拓展板和魔洛克机器人。
五、原理图
暂缺

若有收获,就点个赞吧
0 人点赞
