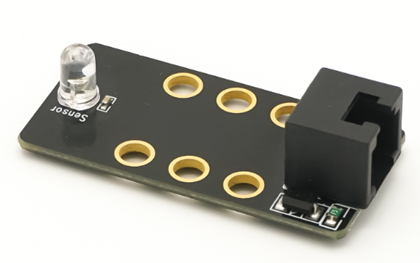
光线传感器
Light sensor
一、概述
光线传感器是基于半导体的光电效应原理所开发的。
此传感器的主要部件为光电晶体管,其可用来对周围环境光的强度进行检测,其电阻随光的强度增加而减小,通过和另一电阻串联,输出电阻的分压值,便能将变化的光信号变换为变化的电气信号,并从模拟口输出。
通常用来制作随光线强度变化产生特殊效果的互动作品,比如智能台灯机器人,追光机器人等。
二、规格
| 工作电压 | DC 5V |
|---|---|
| 工作电流 | 15 mA |
| 工作温度范围 | -30°C到70°C |
| 模块尺寸 | 50 x 24 x 15 mm (长x宽x高) |
| 返回值 | 模拟值0-1023 |
| 参考值 | 暴露于日光(> 500),晚上(0 ~ 100),室内照明情况(100 ~ 500) |
三、特性
a)支持Arduino IDE编程,并且提供运行库来简化编程;
b)支持Robobloq-APP和MyQode-PC图形化编程,适合全年龄用户;
c)使用M4孔位安装,可兼容魔洛克金属平台和乐高圆孔;
d)同时使用RJ11接口连线方便,可用于Qmind系列主板上的任意黑色端口;
e)在机器人连接PC端成功之后会自动弹出传感器种类名称,同时可在APP端的控制台内看到传感器种类名称。
四、使用方法
a) 装配
拥有六个安装孔,安装时注意金属件不可对电路板上面的元器件造成损坏或者造成短路。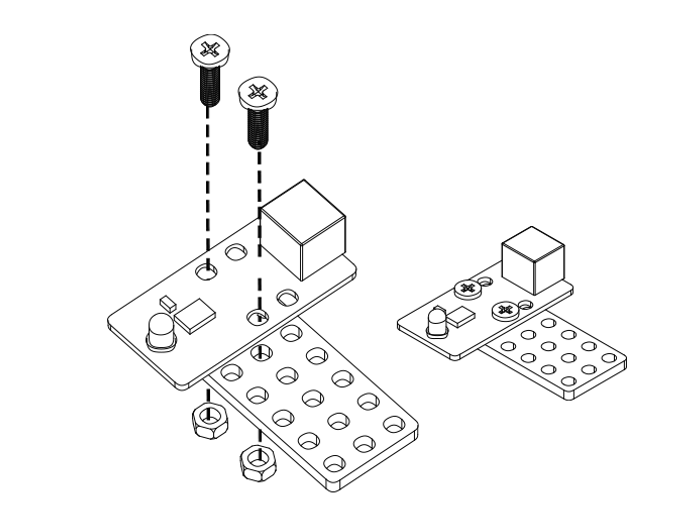
b) 连线
连入Qmind以及Qmind plus的黑色RJ11接口可以获得供电和通信。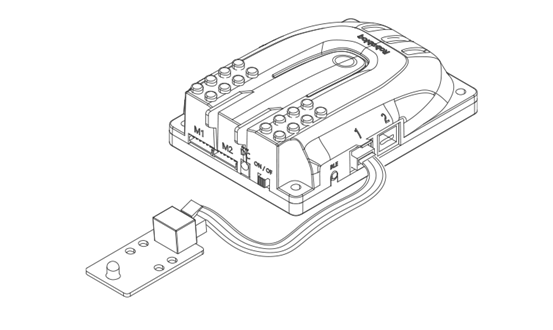
c) 编程语句块
 |
参数—:端口 | 返回值 |
|---|---|---|
| Qmind范围1~3 Qmind plus范围2~7 |
返回值范围0~1023,返回值越大,表明强度越亮。 |
d) 应用案例
1. 01【PC-MyQode 传感器与角色互动】
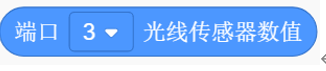
1.在左边魔洛克种类的语句块内找到【光线传感器数值】的语句块
2.嵌入比较型的语句块(绿色);以及相关【如果】语句块和【重复执行】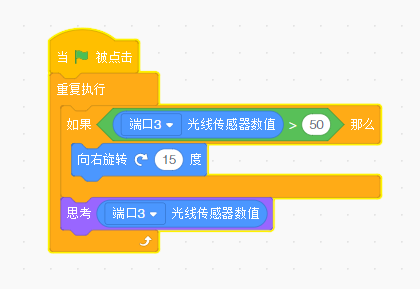
3. 让右上角的角色小人读出【光线传感器】的数值;
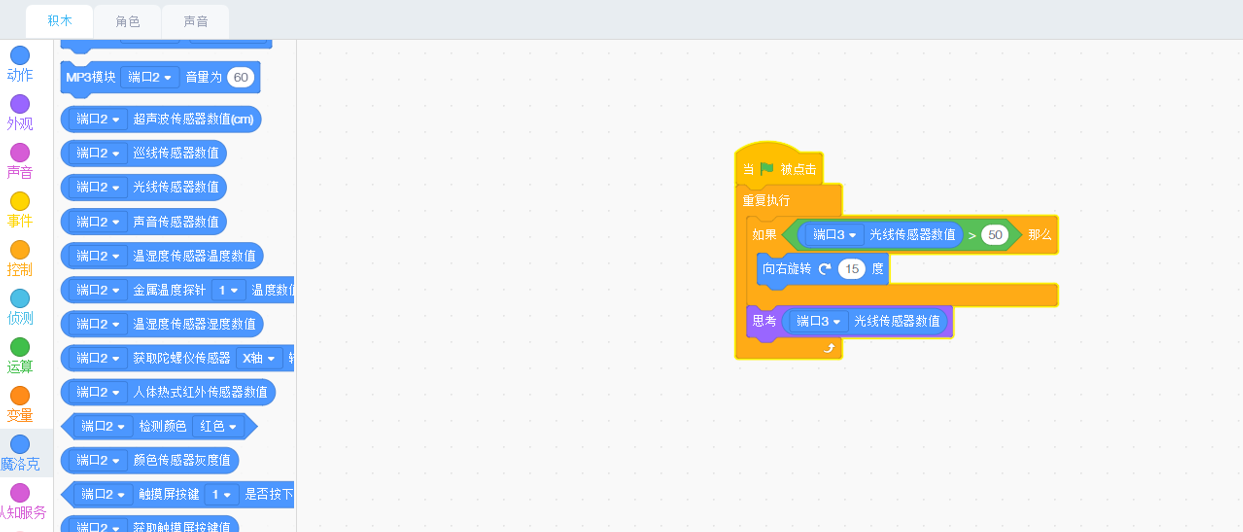
- 当【光线传感器】数值大于五十时,小人一直旋转;且报出传感器数值
2. 02【APP-Robobloq 传感器与机器人互动】
概述:当开机时,主板双灯亮蓝色,当光线传感器检测到亮光时,双灯变红,且发出声音。

1. 连接光线传感器到主控板3号口
2. 设置如上图程序
3. 按右下角运行键开始程序运行。
五、原理图

若有收获,就点个赞吧
0 人点赞
