陀螺仪电子模块
Gyroscope Sensor
一、概述
陀螺仪是一款理想的机器人运动检测、姿态检测模块。包含3轴加速度计、3轴角速度传感器与运动处理器,并提供I2C接口通信。可以应用在自平衡小车、四轴飞行器、机器人及移动设备上,具有高动态测量范围与低电流消耗等优点。本可以连接到Qmind系列主板上来进行更多有趣的机器人案例操作。
二、规格
| 工作电压 | 5V |
|---|---|
| 工作电流 | 20Ma |
| 返回值 | X: -90°-90° ; Y: -90°-90° ; Z: 0°-360° |
| 最大电流 | 100MA |
| 工作温度 | -20-55 |
| 通信方式 | IIC |
| 模块尺寸 | 50 x 24 x 15 mm (长 x 宽 x 高) |
三、特性
a) 具有反接保护,电源反接不会损坏IC;
b) 支持 Arduino IDE 编程, 并且提供运行库来简化编程;
c) 支持Robobloq-APP/MyQode-PC图形化编程,适合全年龄用户。
四、使用方法
a) 装配
拥有4个安装孔,安装时注意金属件不可对电路板上面的元器件造成损坏或者造成短路。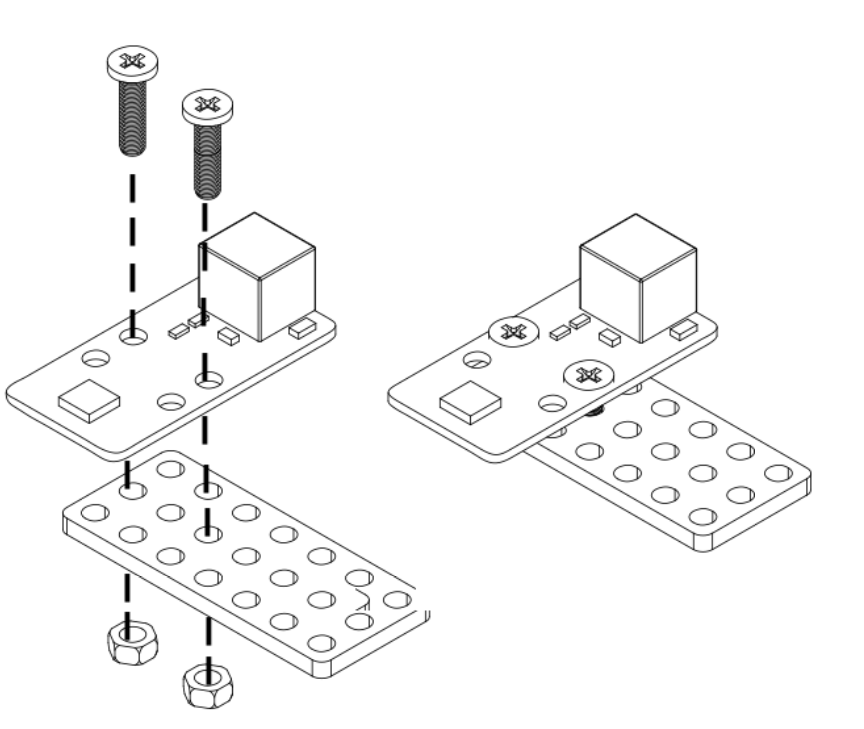
b) 连线
将此模块与魔洛克平台的Qmind系列主控板相连…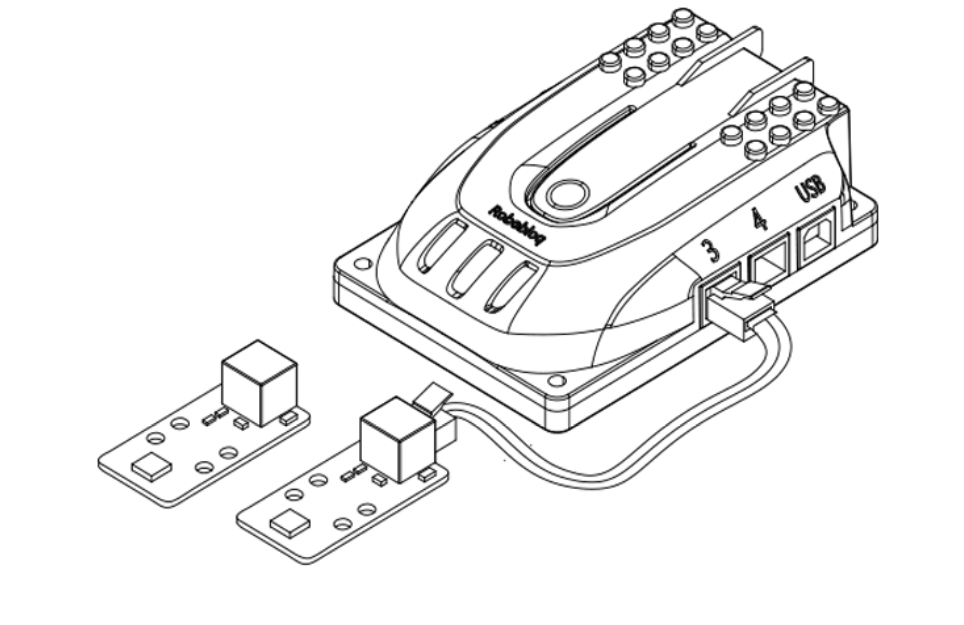
c) 编程语句块
【舞台互动】PC端接入机器人,之后在角色Sprite内找“魔洛克”指令,点击每个语句块可以在线调试机器人,实时调试控制模块的状态。
【在线及离线编程】陀螺仪传感器模块的语句块在“传感器”语句块内;
语句块解释
1. 返回值语句块(种类:传感器)
 |
参数:端口 | 输出值与输入值 |
|---|---|---|
| Qmind 1,2,3 Qmind plus范围2~7 |
可以选择陀螺仪模块所接上的Qmind端口对应数值,来进行操作,此模块可以显示测量陀螺仪在x,y,z三个轴上的取值: X轴:±90°, Y轴:±90°, Z轴:0-360° |
d) PC应用案例
⦁ 用RJ11线连接陀螺仪模块到主控板7号口。
⦁ 设置如上图程序。
⦁ 按下右上角小绿旗来运行程序……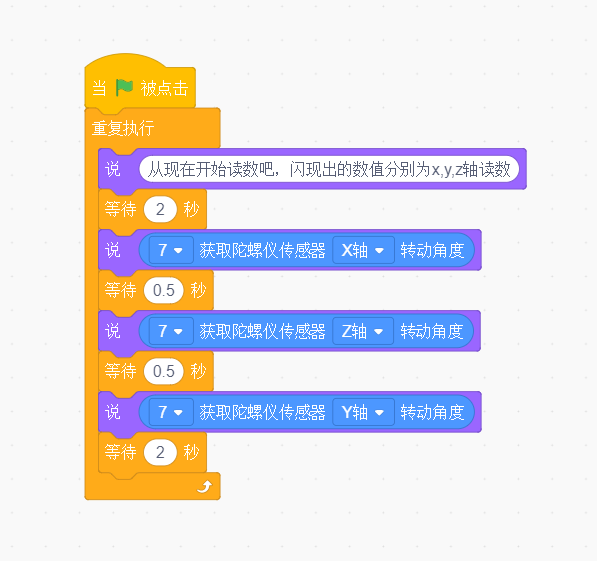
实现效果:
⦁ 此个案例仅仅是感受陀螺仪的读数过程,
⦁ 将陀螺仪在x, y, z轴四个方向进行翻转,来感受屏幕上角色读出的陀螺仪值的变化,
⦁ 角色小魔显示出来的读数分别是x,y,z轴上陀螺仪分别的角度读数。
e) APP应用案例



- 连接陀螺仪模块到主控板7号口。
2. 设置如上图程序。
3. 按下右下角的按钮运行程序。
实现效果:
⦁ 如果“端口7获取陀螺仪传感器X轴·转动角度数值<0”,板载双灯亮芥末绿色,如果转动角度数值大于180,则亮蓝色。
⦁ “端口7获取陀螺仪传感器y轴·转动角度数值<0”, 板载双灯亮芥末绿色,如果转动角度数值大于180,则亮蓝色。
⦁ 如果“端口7获取陀螺仪传感器Z轴·转动角度数值<180”,板载双灯亮芥末绿色,如果转动角度数值大于180,则亮蓝色。
目的:用于感受陀螺仪的摆放位置,以及摆放所对应的角度数值。
五、原理图
暂缺

若有收获,就点个赞吧
0 人点赞
