巡线传感器
Line Follower
**
一、概述
巡线传感器可以帮助机器人进行白线或者黑线的跟踪(可以检测白色背景上的黑色线条或者白色背景上的黑色线条)。模块拥有两个红外传感器,延迟小,可以实时检测地面线条的状态。
二、规格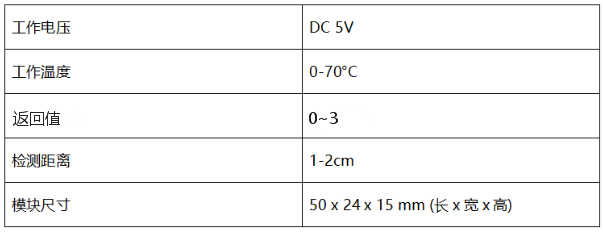
三、特性
a)板载两颗蓝色LED指示灯用于探测反馈。
b)注意本模块容易受自然光的影响,对环境光变化较大的场所有一定的局限性。
c)支持ArduinoIDE编程,并且提供运行库来简化编程。
d)支持Robobloq图形化编程,适合全年龄用户。
e)板载沉金M4安装孔安装方便,使用RJ11接口连线方便。
四、使用方法。
a)装配。
拥有六个安装孔,安装时注意金属件不可对电路板上面的元器件造成损坏或者造成短路。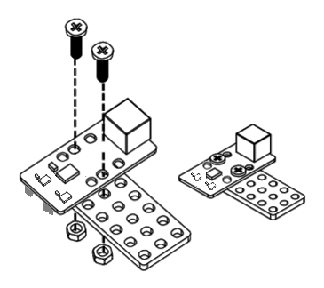
b)连线。
连入Qmind以及Qmindplus的黑色RJ11接口可以获得供电。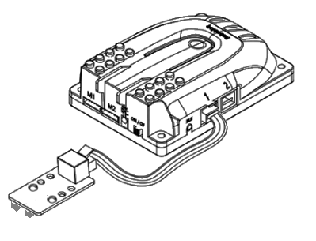
c)编程语句块。

返回值说明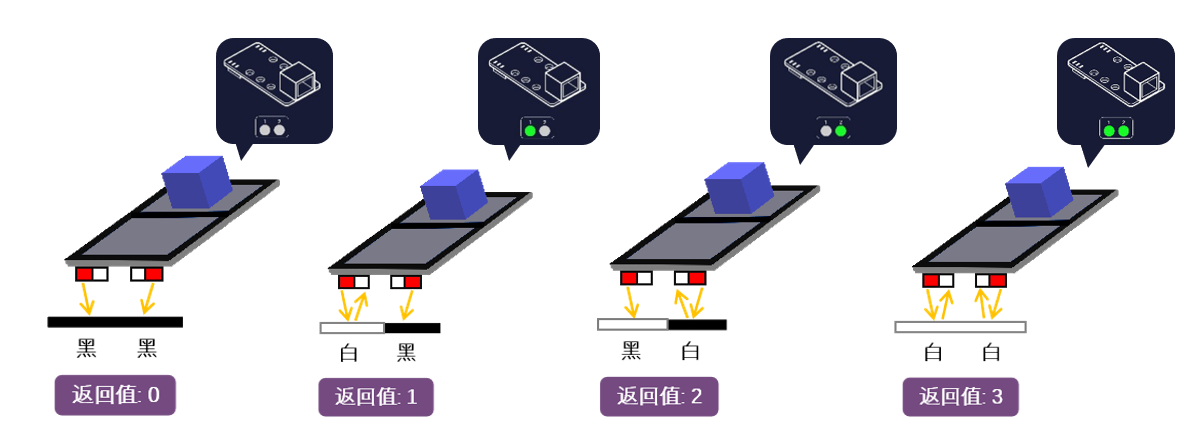
d)应用案例。
1. 连接巡线传感器到主控板2号口
2. 设置如上图程序
3. 按右下角运行键开始程序运行。
程序效果:
当程序运行后,小车向前运动,板载双灯亮绿色,前进过程中,巡线传感器遇到黑线,小车停止,板载双灯变为红色。
五、原理图

若有收获,就点个赞吧
0 人点赞
