二叉树的局限性
二分查找法是一种高效的数据检索方式,时间复杂度为 O(log2n),
最基础的二叉搜索树(Binary Search Tree),搜索某个节点和插入节点的规则一样,我们假设搜索插入的数值为 key:
如果 key 等于根节点,也就是找到了这个节点,返回根节点即可。
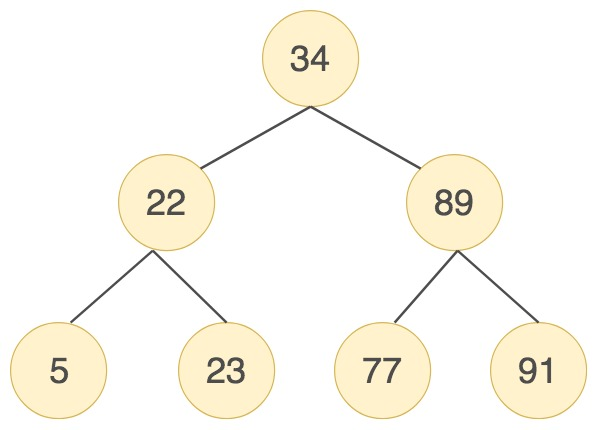
举个例子,对数列(34,22,89,5,23,77,91)创造出来的二分查找树如下图所示:
但是存在特殊的情况,就是有时候二叉树的深度非常大。比如我们给出的数据顺序是 (5, 22, 23, 34, 77, 89, 91),创造出来的二分搜索树如下图所示:
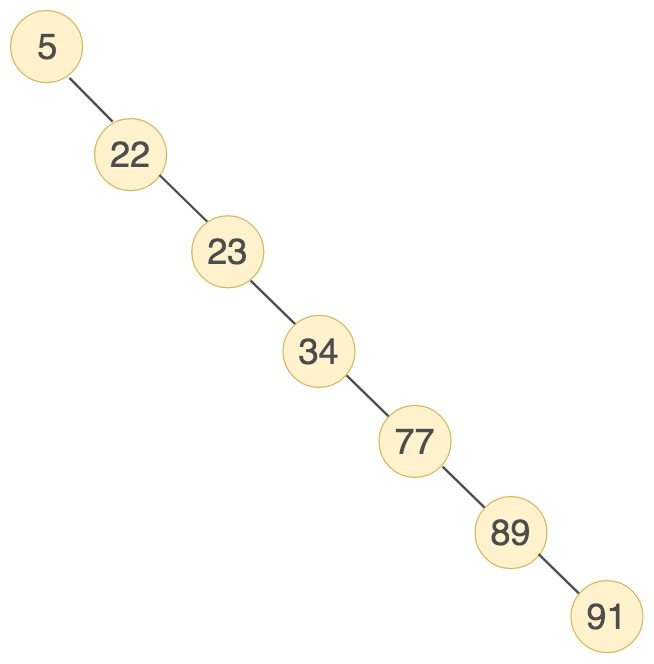
第一个树的深度是 3,也就是说最多只需 3 次比较,就可以找到节点,而第二个树的深度是 7,最多需要 7 次比较才能找到节点。
第二棵树也属于二分查找树,但是性能上已经退化成了一条链表,查找数据的时间复杂度变成了 O(n)。为了解决这个问题,提出了平衡二叉搜索树(AVL 树),它在二分搜索树的基础上增加了约束,每个节点的左子树和右子树的高度差不能超过 1,也就是说节点的左子树和右子树仍然为平衡二叉树。
常见的平衡二叉树有很多种,包括了平衡二叉搜索树、红黑树、数堆、伸展树。平衡二叉搜索树是最早提出来的自平衡二叉搜索树,当我们提到平衡二叉树时一般指的就是平衡二叉搜索树。事实上,第一棵树就属于平衡二叉搜索树,搜索时间复杂度就是 O(log2n)。
数据查询的时间主要依赖于磁盘 I/O 的次数,如果我们采用二叉树的形式,即使通过平衡二叉搜索树进行了改进,树的深度也是 O(log2n),当 n 比较大时,深度也是比较高的,比如下图的情况:
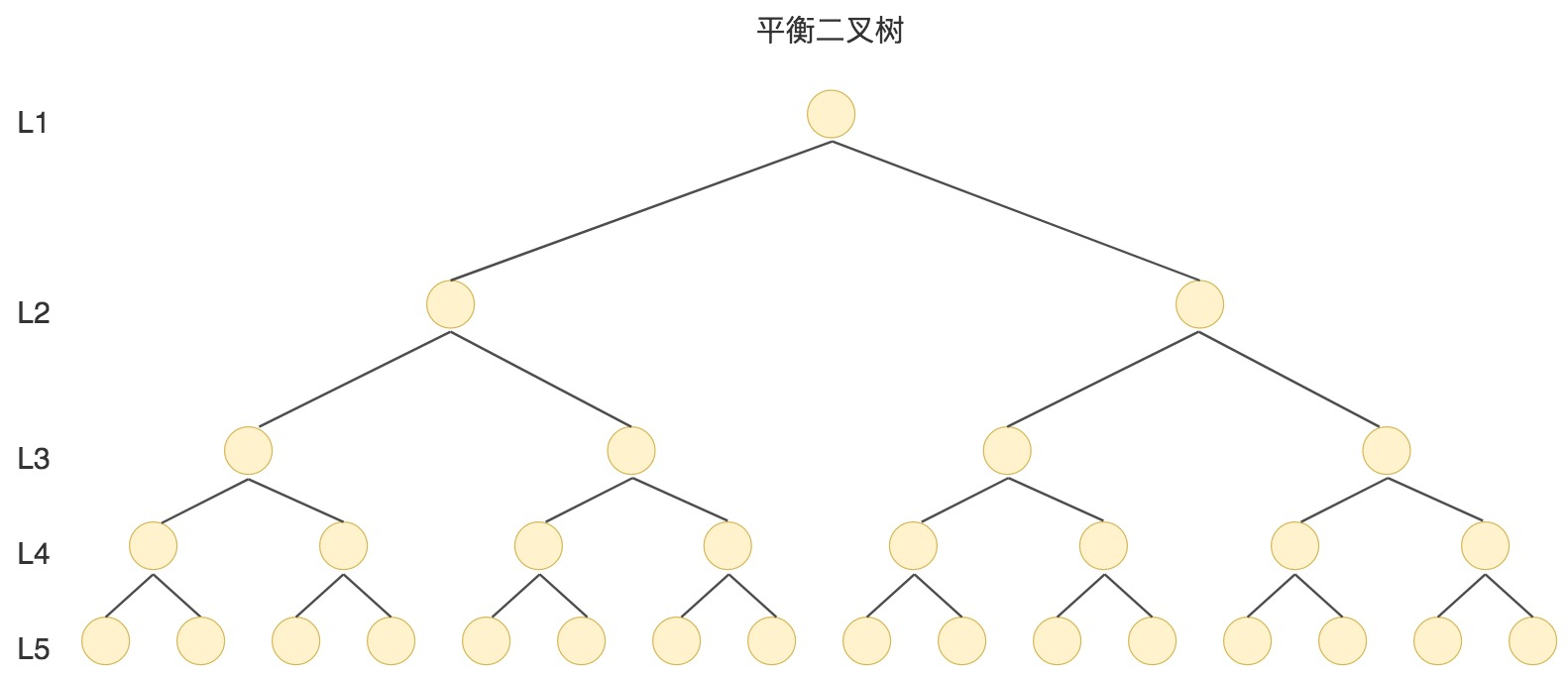
每访问一次节点就需要进行一次磁盘 I/O 操作,对于上面的树来说,我们需要进行 5 次 I/O 操作。虽然平衡二叉树比较的效率高,但是树的深度也同样高,这就意味着磁盘 I/O 操作次数多,会影响整体数据查询的效率。
针对同样的数据,如果把二叉树改成 M 叉树(M>2)呢?当 M=3 时,同样的 31 个节点可以由下面的三叉树来进行存储:
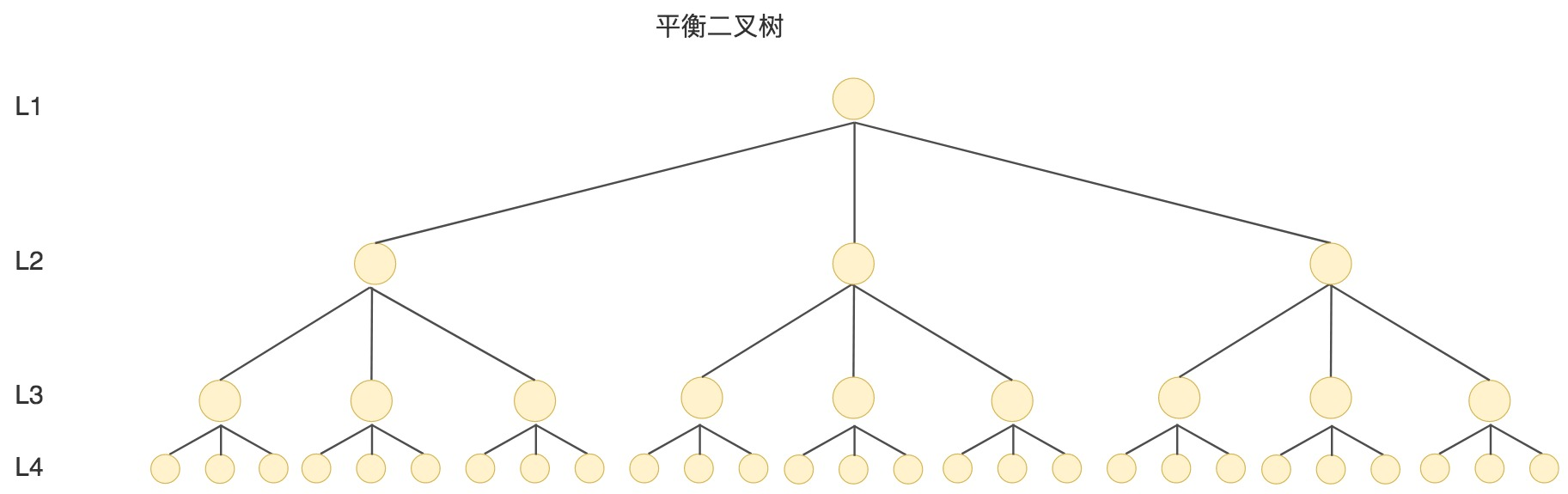
此时树的高度降低了,当数据量 N 大的时候,以及树的分叉数 M 大的时候,M 叉树的高度会远小于二叉树的高度。
什么是 B 树
如果用二叉树作为索引的实现结构,会让树变得很高,增加硬盘的 I/O 次数,影响数据查询的时间。因此一个节点就不能只有 2 个子节点,而应该允许有 M 个子节点 (M>2)。
B 树的出现就是为了解决这个问题,B 树的英文是 Balance Tree,也就是平衡的多路搜索树,它的高度远小于平衡二叉树的高度。在文件系统和数据库系统中的索引结构经常采用 B 树来实现。
B 树的结构如下图所示:
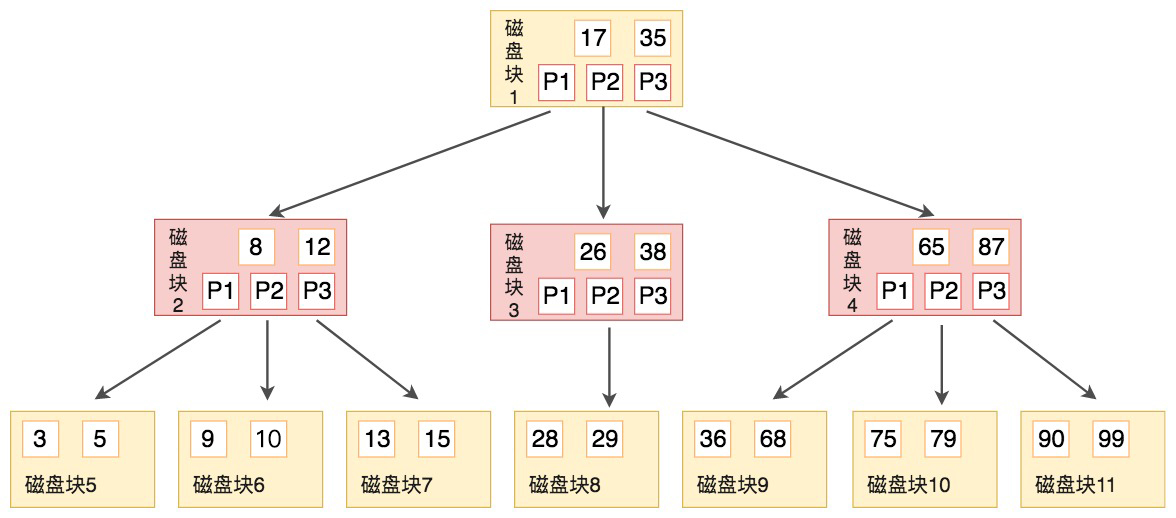
B 树作为平衡的多路搜索树,它的每一个节点最多可以包括 M 个子节点,M 称为 B 树的阶,每个磁盘块中包括了关键字和子节点的指针。如果一个磁盘块中包括了 x 个关键字,那么指针数就是 x+1。对于一个 100 阶的 B 树来说,如果有 3 层的话最多可以存储约 100 万的索引数据。对于大量的索引数据来说,采用 B 树的结构是非常适合的,因为树的高度要远小于二叉树的高度。
一个 M 阶的 B 树(M>2)有以下的特性:
每个中间节点包含 k-1 个关键字和 k 个孩子,孩子的数量 = 关键字的数量 +1,k 的取值范围为[ceil(M/2), M]。
叶子节点包括 k-1 个关键字(叶子节点没有孩子),k 的取值范围为[ceil(M/2), M]。
假设中间节点节点的关键字为:Key[1], Key[2], …, Key[k-1],且关键字按照升序排序,即 Key[i]<Key[i+1]。此时 k-1 个关键字相当于划分了 k 个范围,也就是对应着 k 个指针,即为:P[1], P[2], …, P[k],其中 P[1]指向关键字小于 Key[1]的子树,P[i]指向关键字属于 (Key[i-1], Key[i]) 的子树,P[k]指向关键字大于 Key[k-1]的子树。
上面那张图所表示的 B 树就是一棵 3 阶的 B 树。我们可以看下磁盘块 2,里面的关键字为(8,12),它有 3 个孩子 (3,5),(9,10) 和 (13,15),你能看到 (3,5) 小于 8,(9,10) 在 8 和 12 之间,而 (13,15) 大于 12,刚好符合刚才给出的特征。
然后我们来看下如何用 B 树进行查找。假设我们想要查找的关键字是 9,那么步骤可以分为以下几步:
我们与根节点的关键字 (17,35)进行比较,9 小于 17 那么得到指针 P1;
按照指针 P1 找到磁盘块 2,关键字为(8,12),因为 9 在 8 和 12 之间,所以我们得到指针 P2;
按照指针 P2 找到磁盘块 6,关键字为(9,10),然后我们找到了关键字 9。
你能看出来在 B 树的搜索过程中,我们比较的次数并不少,但如果把数据读取出来然后在内存中进行比较,这个时间就是可以忽略不计的。而读取磁盘块本身需要进行 I/O 操作,消耗的时间比在内存中进行比较所需要的时间要多,是数据查找用时的重要因素,B 树相比于平衡二叉树来说磁盘 I/O 操作要少,在数据查询中比平衡二叉树效率要高。
什么是 B+ 树
B+ 树基于 B 树做出了改进,主流的 DBMS 都支持 B+ 树的索引方式,比如 MySQL。B+ 树和 B 树的差异在于以下几点:
有 k 个孩子的节点就有 k 个关键字。也就是孩子数量 = 关键字数,而 B 树中,孩子数量 = 关键字数 +1。
非叶子节点的关键字也会同时存在在子节点中,并且是在子节点中所有关键字的最大(或最小)。
非叶子节点仅用于索引,不保存数据记录,跟记录有关的信息都放在叶子节点中。而 B 树中,非叶子节点既保存索引,也保存数据记录。
所有关键字都在叶子节点出现,叶子节点构成一个有序链表,而且叶子节点本身按照关键字的大小从小到大顺序链接。
下图就是一棵 B+ 树,阶数为 3,根节点中的关键字 1、18、35 分别是子节点(1,8,14),(18,24,31)和(35,41,53)中的最小值。每一层父节点的关键字都会出现在下一层的子节点的关键字中,因此在叶子节点中包括了所有的关键字信息,并且每一个叶子节点都有一个指向下一个节点的指针,这样就形成了一个链表。
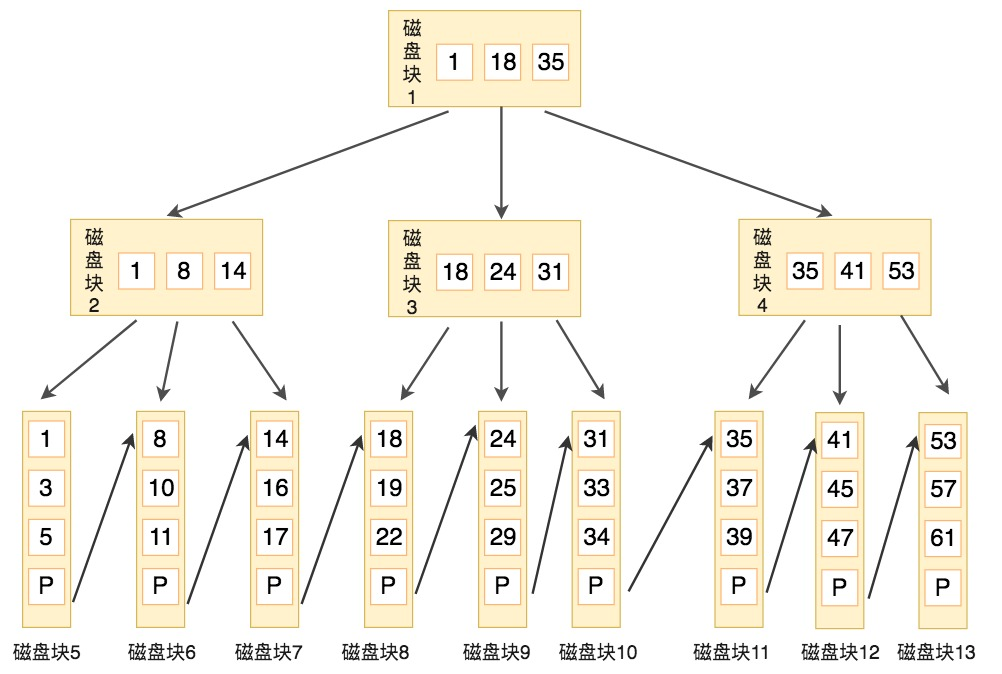
想要查找关键字 16,B+ 树会自顶向下逐层进行查找:
与根节点的关键字 (1,18,35) 进行比较,16 在 1 和 18 之间,得到指针 P1(指向磁盘块 2)
找到磁盘块 2,关键字为(1,8,14),因为 16 大于 14,所以得到指针 P3(指向磁盘块 7)
找到磁盘块 7,关键字为(14,16,17),然后我们找到了关键字 16,所以可以找到关键字 16 所对应的数据。
整个过程一共进行了 3 次 I/O 操作,看起来 B+ 树和 B 树的查询过程差不多,但是 B+ 树和 B 树有个根本的差异在于,B+ 树的中间节点并不直接存储数据。这样的好处都有什么呢?
首先,B+ 树查询效率更稳定。因为 B+ 树每次只有访问到叶子节点才能找到对应的数据,而在 B 树中,非叶子节点也会存储数据,这样就会造成查询效率不稳定的情况,有时候访问到了非叶子节点就可以找到关键字,而有时需要访问到叶子节点才能找到关键字。
其次,B+ 树的查询效率更高,这是因为通常 B+ 树比 B 树更矮胖(阶数更大,深度更低),查询所需要的磁盘 I/O 也会更少。同样的磁盘页大小,B+ 树可以存储更多的节点关键字。
不仅是对单个关键字的查询上,在查询范围上,B+ 树的效率也比 B 树高。这是因为所有关键字都出现在 B+ 树的叶子节点中,并通过有序链表进行了链接。而在 B 树中则需要通过中序遍历才能完成查询范围的查找,效率要低很多。
磁盘的 I/O 操作次数对索引的使用效率至关重要。虽然传统的二叉树数据结构查找数据的效率高,但很容易增加磁盘 I/O 操作的次数,影响索引使用的效率。因此在构造索引的时候,我们更倾向于采用 “矮胖” 的数据结构。
B 树和 B+ 树都可以作为索引的数据结构,在 MySQL 中采用的是 B+ 树,B+ 树在查询性能上更稳定,在磁盘页大小相同的情况下,树的构造更加矮胖,所需要进行的磁盘 I/O 次数更少,更适合进行关键字的范围查询。
简短回答
因为B树不管叶子节点还是非叶子节点,都会保存数据,这样导致在非叶子节点中能保存的指针数量变少(有些资料也称为扇出),指针少的情况下要保存大量数据,只能增加树的高度,导致IO操作变多,查询性能变低;

若有收获,就点个赞吧
0 人点赞
