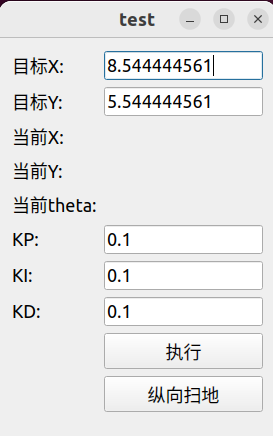
纵向扫地
https://robot.czxy.com/docs/ros/pid/asserts/z1.mp4
横向扫地
https://robot.czxy.com/docs/ros/pid/asserts/z2.mp4
回字形扫地
https://robot.czxy.com/docs/ros/pid/asserts/z3.mp4
实现分析
小乌龟是按照一定的方式进行移动的,在整个移动过程中,小乌龟都是有自己的路径的,路径的规划是需要考虑的。
路径规划的算法有很多,但是根本就是生成一系列的点,将点按照顺序连在一起就是路径和轨迹了,点越多,路径越清晰。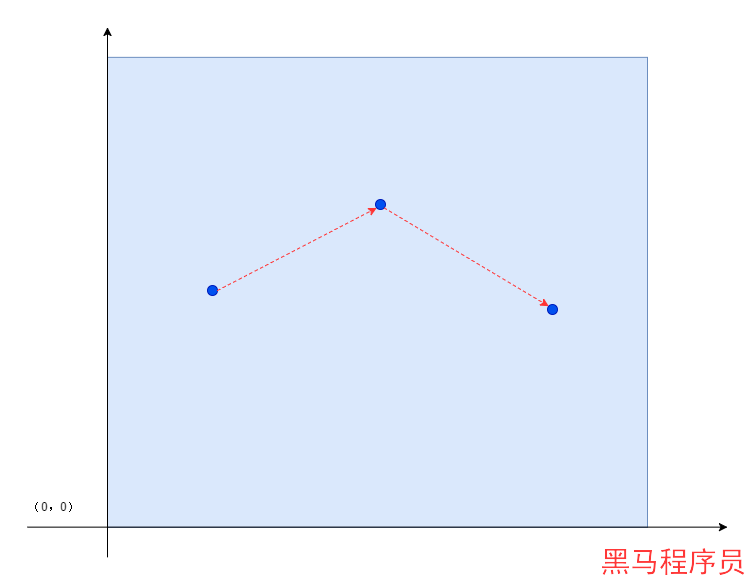
目前小乌龟案例中,我们要解决的是小乌龟由一个点到另外一个点的运动。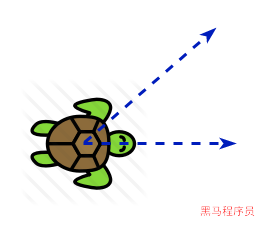
小乌龟运动的特点是,前进或是转角,前进控制了移动的距离,转角控制了移动的方向。
要控制小乌龟移动到具体的点,就是要解决前进和转向的问题。

若有收获,就点个赞吧
0 人点赞
