小车接收线速度和角速度
两轮差速运动
小车是一个刚体,所以轮子的每个位置角速度都是相同的, 而由于转弯半径不同,所以每个轮子的线速度会有所不同.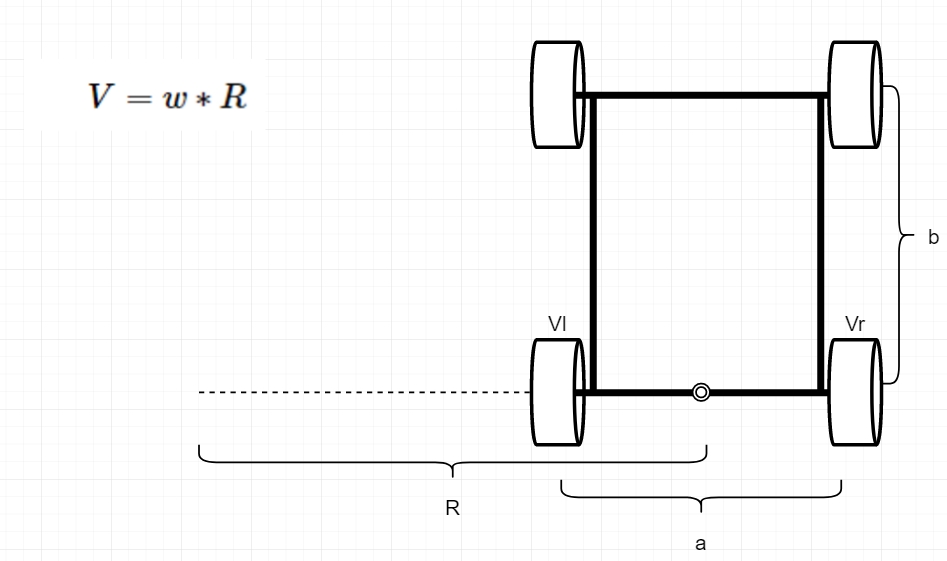
速度推导左右轮转速
已知线速度为V,角速度为:w 那么左右轮速度应该等于多少呢?
左右轮转速推导速度
已知左右轮的速度,我们推导当前小车前进的线速度和角速度
小车线速度公式: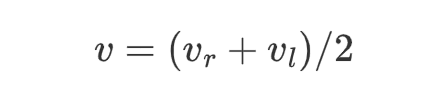
小车角速度公式: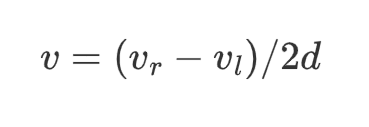
根据线速度和角速度计算左右轮子速度代码实现
//属性//轮子直径#define WHEEL_DIAMETER 0.032//一圈的信号数#define WHEEL_TPR 1400//左右轮子距离#define WHEEL_DISTANCE 0.11#define PI 3.14159265158//根据线速度和角速度计算左右两个轮子的线速度void calc_left_right_vel(float vel,float ang,float*vl,float *vr){*vl = vel - ang*0.5*WHEEL_DISTANCE;*vr = vel + ang*0.5*WHEEL_DISTANCE;}
pid调节左右轮子移动速度
//接收上位机的线速度和角速度float vel = 0.1;float ang = -0.3;//左右轮子目标速度float vl = 0;float vr = 0;float hz = 20;//左右轮子当前速度float cur_vl = 0;float cur_vr = 0;float kp = 200;float ki = 0;float kd = 150;//左轮误差float pre_error_left = 0;float pre_error_right = 0;float total_error_left = 0;float total_error_right = 0;//左右轮子的pwmfloat pwm_left = 0;float pwm_right = 0;//左侧轮子pid控制int pid_left(float tar,float cur){float cur_error = tar-cur;pwm_left+=kp*cur_error;total_error_left+=cur_error;pwm_left+=ki*total_error_left;pwm_left+=kd*(cur_error-pre_error_left);pre_error_left=cur_error;return (int)pwm_left;}//右侧轮子pid控制int pid_right(float tar,float cur){float cur_error = tar-cur;pwm_right+=kp*cur_error;total_error_right+=cur_error;pwm_right+=ki*total_error_right;pwm_right+=kd*(cur_error-pre_error_right);pre_error_right=cur_error;return (int)pwm_right;}
控制主逻辑
while(1){//根据线速度和角速度计算calc_left_right_vel(vel,ang,&vl,&vr);//当前速度cur_vl = (bsp_encoder_get_left()*hz*1.0)/WHEEL_TPR*WHEEL_DIAMETER*PI;cur_vr = (bsp_encoder_get_right()*hz*1.0)/WHEEL_TPR*WHEEL_DIAMETER*PI;printf("vl:%f,vr:%f,cur_vl:%f,cur_vr:%f\n",vl,vr, cur_vl,cur_vr);//通过pid计算两侧的轮子pwm//bsp_motor_set(pid_left(vl,cur_vl),pid_right(vr,cur_vr));delay_1ms(1000/hz);}

若有收获,就点个赞吧
0 人点赞
