我们可以把整张 Network 想象成一个物理仿真系统 (Simulation)。系统中的每个节点 (Node) 都是一个带有能量的粒子,粒子与粒子之间存在斥力(如模拟库伦斥力),而被边 (Link) 所连结的粒子受到牵引力(如模拟胡克弹力)。系统中的粒子在斥力和引力的不断作用下,从随机无序的布局 (Layout) 不断发生位移,逐渐趋于平衡有序的布局。同时整个仿真系统的能量也在不断消耗,经过数次迭代后,粒子之间不再发生相对位移,整个系统达到最终稳定平衡的状态。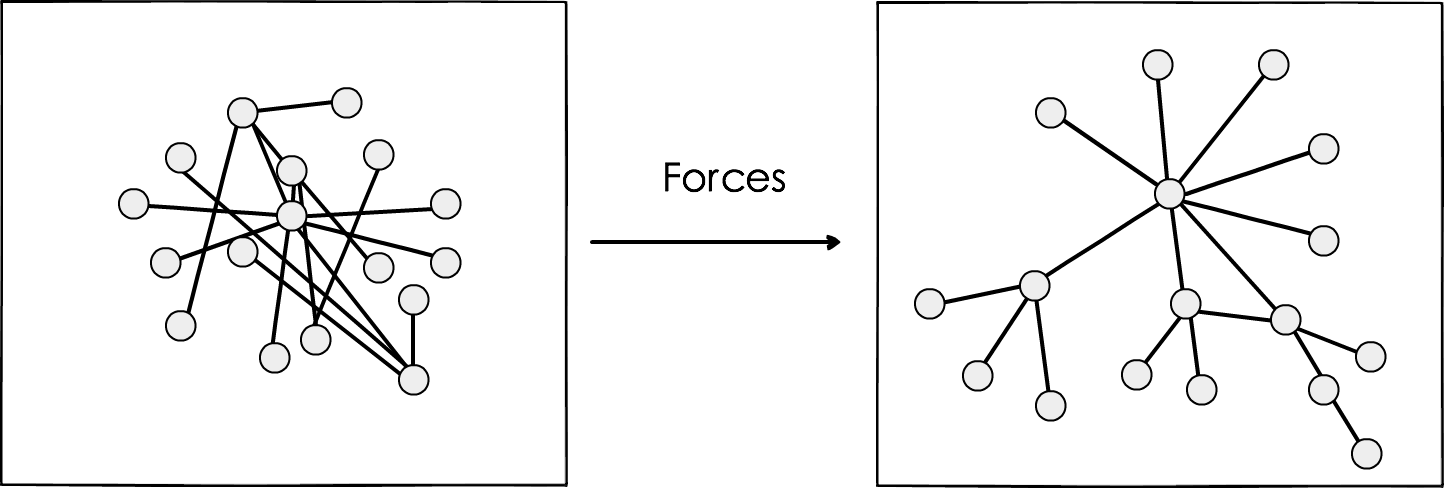
此动效实现的本质就是每一帧都重新渲染图中节点的位置 (x,y),节点的位置 (x,y) 是由节点上一帧所处的位置 (x,y) + 速度 (vx,vy) 所决定的,而速度就是通过力学模型所计算出来的。
关键在于力(Forces),D3 中内置了几种经典的力模型。
中心力
中心力可以使得节点最终布局是围绕着某个中心的。相当于某个中心点对所有的节点都有一个制约,不会让布局的中心偏离。
碰撞力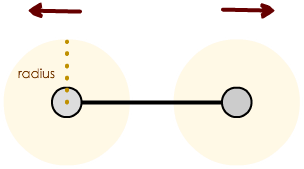
- 碰撞力为每个节点都设定一个圆形的碰撞区域,从而防止节点之间重叠;
- 关键参数:radius 碰撞半径。
牵引力(Links)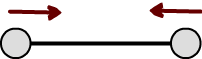
- 牵引力的强度与节点之间的距离成正比,类似于弹簧力;
- 关键参数:distance。影响两个节点之间的最终距离。
N 体力(Many-Body)
N体问题是天体力学的一种力学模型,它研究 N 个质点相互之间在万有引力作用下的运动规律。
- Many-Body 力是作用于所有节点之间的,是全局的,任何两个节点之间都将受到此力的影响。(与 牵引力 Links 不同,Links 力仅仅会影响有连接关系的两个节点);
- 它可以用来模拟引力(吸引力),只需设置的 strength 参数为正数;
- 它也可用来模拟电荷力(排斥力),只需设置的 strength 参数为负数;
- 实现算法使用了the Barnes–Hut approximation(通过将平面不断递归地划分成四个小区域来构建一棵四叉树) 来提高性能;
方向力(Positioning)
方向力分为 X 方向和 Y 方向,即将作用力限制在一个维度上( X 维度或者 Y 维度)

若有收获,就点个赞吧
0 人点赞
