一个SLAM系统分为前端和后端,其中前端也称为视觉里程计(Visual Odometry,VO)。视觉里程计根据相邻图像的信息估计出粗略的相机运动,给后端提供较好的初始值。视觉里程计主要分为两个大类:① 特征点法;② 直接法。
视觉里程计的核心问题是如何根据图像估计相机运动。
特征点
特征点是图像里一些特别的地方。比如图像中的角点、边缘和区块。角点的提取算法有很多,比如Harris角点、FAST角点、GFTT角点,这些都是2000年以前的算法。角点在相机移动后可能就提取不出来了,为此需要提取更加稳定的局部图像特征,比如SIFT、SURF、ORB等等。这些人工设计(通过特定算法)的特征点能够拥有如下性质:① 可重复性(相同的特征可以在不同的图像中找到);② 可区别性(不同的特征有不同的表达);③ 高效率(特征点的数量远小于像素的数量);④ 本地性(特征仅与一小片图像区域相关)。
特征点的组成:关键点(KeyPoint)和描述子(Descriptor)。关键点是该特征点在图像中的位置,有些特征点还具有朝向、大小等信息。描述子是按照“外观相似的特征应该有相似的描述子”的原则设计的。
1.1 ORB特征(Oriented FAST and Rotated BRIEF)(重点)
特征点提取方法有很多,但ORB提取算法在实时性上优势很大,并且精度也不低。
ORB特征:由关键点和描述子组成。提取ORB特征分为两个步骤:
- FAST角点提取:在原始FAST角点提取算法的基础上,计算了特征点区域的质心M,得到特征点的主方向OM
- BRIEF描述子:对前一步提取的特征点的周围区域进行描述。
相对于之前的FAST算法:
- ORB通过构建图像金字塔来实现尺度不变性,在金字塔的每一层进行角点检测。比如相机在后退,那么我们应该能够在上一个图像金字塔的上层(像素低、远)和下一个图像金字塔的下层(像素高、近)找到匹配。ORB通过
- ORB通过灰度质心法(Intensity Centroid)实现旋转不变性。
这里的XX不变性可以理解为尺度缩放(图像旋转)后依然能在第二张图像中找到对应的特征点匹配。
1.1.1 Fast关键点(oriented)
流程:
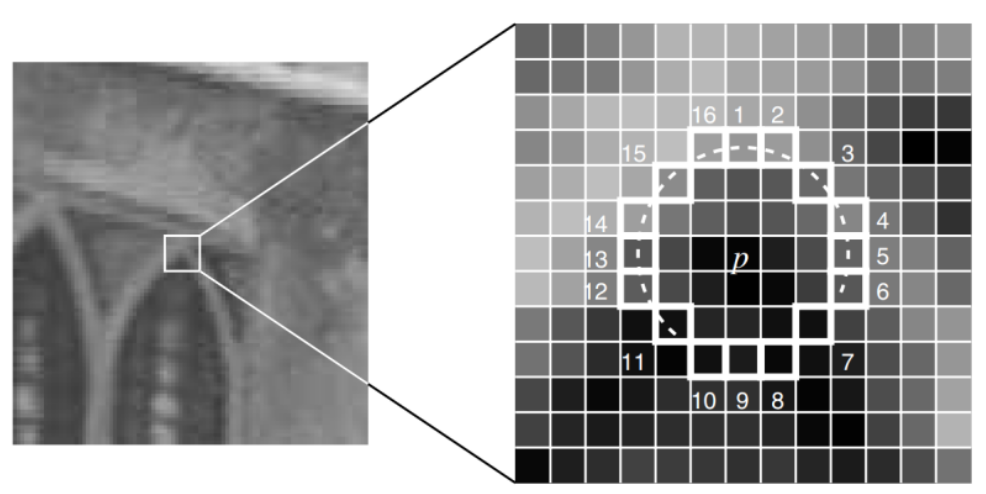
- 选取像素p,假设它的亮度为lp
- 设一个阈值T,比如lp的20%
- 以像素点为中心,选取半径为3的圆上面的16个像素点(不是圆内)
- 假如选取的圆上,有连续的N个点亮度大于lp+T或者lp-T,那么像素p可以被认为是特征点
- 循环以上4步,对每一个像素执行相同操作
灰度质心法提取质心:
- 定义图像的矩(图像矩是图像像素强度的某个特定加权平均,用来描述图像特征,有原点矩,中心矩,hu矩)
- 根据原点矩的一阶矩和零阶矩的比值可以找到图像块的质心(零阶矩是区域内所有像素的灰度值综合,一阶矩是单个方向上)
这里的灰度质心法是在圆形区域内进行的灰度质心计算,ORBSLAM是先旋转坐标再从图像中采点提取,并不是先取再旋转,所以如果用正方形,旋转前后会取到不同部分的像素。
1.1.2 BRIEF描述子(Binary Robust Independent Elementary Features)
BRIEF描述子(descriptor)是一种二进制描述子,其描述向量由许多个0和1组成,这里的0和1编码了关键点附近两个随机像素(比如p和q)的大小关系:如果p比q大,则取1,反之就取0。如果我们取了128个这样的p、q,则最后得到128维的二进制向量。通俗的理解:在关键点p的周围以一定的模式选取N个点对,把这N个点对的结果组合起来作为描述子。
由于ORB特征在提取角点是提供的方向信息,所以计算旋转之后的steer BRIEF特征使得ORB的描述子具有较好的旋转不变性。
特征匹配
特征匹配就是将图像1和图像2提取的特征点进行相互对应。特征匹配是视觉SLAM中极为关键的一步,宽泛的说,特征匹配解决了SLAM中的数据关联问题(data association)。匹配方式是计算描述子之间的距离,然后排序,取距离最近(特征最相似)的一个作为匹配点。对于二进制描述子,常用汉明距离(不同位数的个数)。对于浮点数描述子,常用欧氏距离。
特征匹配方法:
- 暴力匹配法,将图1中的m个特征点和图2中的n个特征点进行m*n次匹配
- 快速近邻最近邻(FLANN):适合于匹配点数量极多的情况
特征匹配方法大多已集成进OpenCV中。
计算相机运动
有了匹配好的点对后,就可以估计相机的运动:
- 当相机为单目时,使用对极几何解决。根据两组2D点估计运动
- 如果一组为3D、一组为2D时(或者单目用对极几何计算出初始化深度),使用PnP求解
- 如果相机为双目、RGB-D是,使用ICP求解。利用两组3D点估计运动
2. 2D-2D对极几何
2.1 对极约束
两个图像I1、I2,两相机中心O1、O2,两个图像中的对应特征点p1、p2,空间点P(相机坐标系)。O1O2P组成的平面为极平面(Epipolar plane),极平面与I1和I2相交形成的线为极线(Epipolar line),O1O2为基线,基线和I1、I2相交的点称为极点(Epipoles)。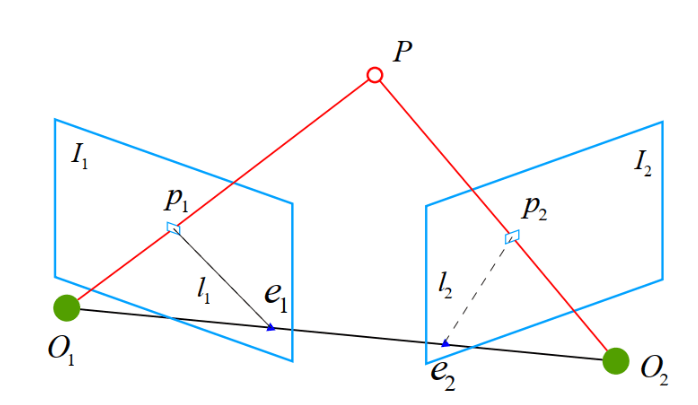
2.2 对极约束式子的引出
目的:我们希望用一个式子将已知的空间信息(特征点位置等)和相机运动(R, t)约束起来,以求解相机的运动R和t。p1和p2之间的转换关系。
推导:我们知道像素坐标系和相机坐标系的转换关系:
Z为点的深度,换一种方式书写:
在使用其次坐标时,一个向量将等于它自身乘上任意的非零常数。这通常表示一种投影关系,比如p1和s1p1成投影关系,它们在齐次坐标系下的意义是相等的。我们称这种相等关系为尺度意义下相等(equal to scale),记为:
于是,我们用x1和x2来表示两个像素点p1p2的归一化平面上的坐标,有:
而x1 x2仍然具有尺度意义下相等关系:
两边同时左乘 ,再同时左乘
,再同时左乘 :
:
回忆反对称矩阵的性质反对称矩阵的性质, 相当于叉积,得到了与x2垂直的向量,再和x2进行內积结果为0.则我们可以吧\simeq写为等号,于是就得到了对极约束:
相当于叉积,得到了与x2垂直的向量,再和x2进行內积结果为0.则我们可以吧\simeq写为等号,于是就得到了对极约束:

对极约束的几何意义: 三者共面。
三者共面。
其中的部分记作两个矩阵:基础矩阵(Fundamental Matrix)F和本质矩阵(Essential Matrix)E:
由于对极约束,相机位姿估计问题变成以下两步:
- 根据配对点的像素位置求出基础矩阵F或者本质矩阵E
- 根据F或者E求出R, t
2.3 本质矩阵E
关于本质矩阵E的内在性质的证明:证明过程
2.4 单应矩阵
单应矩阵homography(H),描述了两个平面之间的映射关系。
流程:
- 点p2与P的转换关系(内参外参)
- 平面方程构建,构建左边=1
- 代入转换关系方程
- 把P提取出来
- 把p1和P的转换关系代入
- 得到p1和p2的关系式,


若有收获,就点个赞吧
0 人点赞
