本文不以书上的知识点流程进行记录,而是将初学SLAM一些相关却又比较陌生的知识点、名词进行总结,然后再记录第3讲的相关知识。
1. 刚体
刚体rigid body,指在运动或受力的过程中,形状和大小不变,各个质点的相对位置不变
2. 欧氏空间(euclidean space)
欧几里得空间就是对现实空间的规则抽象和推广(从n<=3推广到有限n维空间)
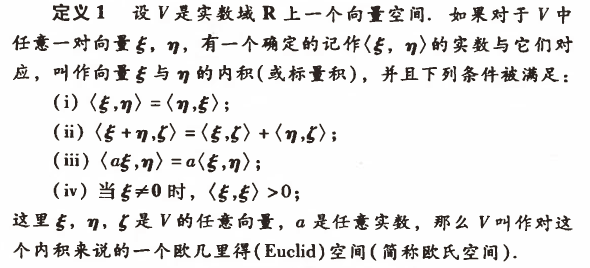
简单来说所有满足从2维、3维推出的内积、距离、角的定义的空间都叫做欧氏空间。
2.1 欧氏距离:

2.2 欧氏变换:
欧氏变换由旋转和平移组成。
非欧几里得空间:二维扁平智能生物
https://www.zhihu.com/question/27903807
3. 笛卡尔坐标系
又称直角坐标系、正交坐标系。笛卡尔坐标系的研究结合了代数和欧几里得几何,对于后来的解析几何、微积分和地图学的发展,具有关键性的意义。
4. 透视空间
透视从理论上直观的解释了物体在平面(2维)上呈现三维空间的基本原理和规律。方法有单点透视、空气透视和散点透视。更多的是绘画上的概念。
可以直接把透视空间理解为3维空间往某个方向、平面,拍扁成2维平面所形成的图像。
5. 齐次坐标系
5.1 问题:两条平行线可以相交于一点?
在欧式空间中,同一平面的两条平行线不能相交,但是透视空间中可以,比如火车轨道随着我们的实现越来越窄,最后两条平行线在无穷远处交于一点。
这个点的坐标是消失点(无穷,无穷),这在欧式空间中没有意义。
简而言之,齐次坐标系,就是用N+1维向量(矩阵)来表示N维向量(矩阵),而转化回笛卡尔坐标系就是用前N-1个元素除以第N个元素即可。齐次坐标系就是为了解决,平行线在透视空间相交且相交点在欧式空间没有意义的问题。
笛卡尔坐标系(a, b) -> 齐次坐标系(x, y, w)
其中a = x / w, b = y / w
5.2 为什么叫齐次?
(4, 6, 2)和(2, 3, 1)对应的是同一个欧氏点,这些点是齐次的,齐次坐标有规模不变性。
求平行线相交方程组:
https://blog.csdn.net/janestar/article/details/44244849
如果是普通坐标系,则方程无解,转化为齐次坐标系则有解,解在无穷远处
6. 关于Eigen
- 在c++程序中,我们可以把一个float数据和double数据相加、相乘,编译器会自动把数据类型转换为最合适的那种。而在eigen中,处于对性能的考虑,必须显式得对矩阵类型进行转换,不然会出错。
- 如果发现eigen出错,你可以直接找大写的部分,来看看出了什么问题。
- eigen几乎所有数据都当做矩阵来处理
7. 基础知识
7.1 点和向量
点是空间中的基本元素,没有长度,没有体积。把两个点连接起来,就构成了向量。
向量可以看成从某点指向另一个点的一个箭头。切记,不要把向量与它的坐标这两个概念啊混淆。向量就是空间中的一个东西,不需要与任何实数相关联,只有确定了空间中的某个坐标系时,才可以谈论该向量在此坐标系下的坐标,也就是找到若干个实数对应这个向量。
坐标的具体取值,一是和向量本身有关,二是和坐标系(基)的选取有关。基就是张成这个空间的一组线性无关的向量,有些书里也叫基底。基向量的长度为1。
7.2 点乘和叉乘
dot内积(点乘):
① a在b上的投影的模乘以b的模
② 描述向量之间的夹角
矩阵没有点乘一说
cross product外积(叉乘):
① aOb平面的法向量
② ab组成的平行四边形的面积和法向量长度
法向量的方向成右手法则,所以叉乘的顺序是会有影响的。
反对成矩阵(skew-symmetric matrix),如a = [a1, a2, a3]
在机器人学中,你会给每个连杆和关节定义它们的坐标系。如果考虑运动的机器人,那么常见的做法是设定一个惯性坐标系(或者世界坐标系),可以认为它是固定不动的。
8. 旋转矩阵相乘的含义

旋转矩阵 代表的意思是“把坐标系2的向量变换到坐标系1”。由于向量乘在了这个矩阵的右边,它的下表是从右读到左的。关于平移
代表的意思是“把坐标系2的向量变换到坐标系1”。由于向量乘在了这个矩阵的右边,它的下表是从右读到左的。关于平移 ,它实际对应的是坐标系1原点指向坐标系2原点的向量,在坐标系1下取得坐标。但是反过来的
,它实际对应的是坐标系1原点指向坐标系2原点的向量,在坐标系1下取得坐标。但是反过来的 不等于
不等于 ,t指平移,运算时为向量,但不能默许相反数的规则,这回导致后续的数学运算出错。
,t指平移,运算时为向量,但不能默许相反数的规则,这回导致后续的数学运算出错。
9. 变换矩阵Transform Matrix
SO(n)是特殊正交群(special orthogonal group),集合的定义如下:
特殊正交群要求正交,且行列式为1.
我们在一个三维向量的末尾添加1,将其变成了四位向量,称为其次坐标。对于这个四位向量,我们可以把旋转和平移卸载一个矩阵里,使得整个关系变成线性关系。
SE(3)是特殊欧氏群(special euclidean group),定义如下:
反向的变换.inverse()为:
10. 旋转向量、欧拉角、四元数
10.1 旋转向量和旋转矩阵
任意旋转都可以用一个旋转轴和一个旋转角来刻画。于是,我们可以使用一个向量,其方向与旋转轴一致,而长度等于旋转角。这种向量称为旋转向量(或轴角/角轴,axis-angle),只需要一个三维向量即可描述旋转。
如果用一个旋转矩阵R来表示旋转,可以从旋转向量转化过来,假设旋转向量的单位向量n,以及角度(长度)Θ,则可以通过罗德里格斯公式(Rodrigues’s Formula)来表明:
如果从旋转矩阵转回旋转向量,则可以两边取迹,方向向量则是R特征值为1的特征向量。
10.1.1 旋转向量和旋转矩阵Eigen
# 向量和旋转向量是不一样的,向量的base是Eigen::Matrix,而旋转向量是Eigen::AngleAxis# 初始化旋转向量Eigen::AngleAxisd rotation_vector(M_PI / 2, Eigen::Vector3d(1,2,3).normalized());# 注意normalized()返回向量,norm返回L2范数,normalize()是归一化处理,不返回值# 旋转向量转旋转矩阵Eigen::Matrix3d rotation_matrix = rotation_vector.matrix();# 旋转矩阵转旋转向量Eigen::Vector3d rotate;rotate.fromRotationMatrix(rotation_matrix);
10.2 欧拉角
无论是旋转矩阵还是旋转向量,虽然能描述旋转,但是对人类来说很不直观。
欧拉角提供了一种非常直观的方式来描述旋转——使用3个分离的转角,把一个旋转分解成3次不同的旋转。假设一个刚体的前方为x轴,右侧为Y轴,上方为Z轴。通常使用ypr(yaw-pitch-row)旋转顺序。
10.3 万向锁
欧拉角的一个重大缺点就是会碰到著名的万向锁问题(gimbal lock):当第二个旋转角为±90°时,第一次旋转和第三次旋转将会使用同一个轴,使得系统丢失一个自由度(由三次旋转变为2次旋转)。这被称为奇异性问题。理论上可以证明,只要想用三个实数来表达三维旋转,都会不可避免的遇到奇异性问题。
10.3.1 如何理解万向锁?
首先,万向锁(gimbal lock),是使用动态欧拉角表示旋转会出现的问题。
首先搞清楚一个概念,欧拉角有两种旋转:
- 静态:世界坐标系(惯性坐标系),绕着世界坐标系三个轴旋转,因为物体旋转过程坐标轴保持静止,所以称为静态。
- 动态:绕着物体坐标系旋转,因为旋转过程中坐标轴随着物体做相同的运动,所以称为动态。
使用动态欧拉角会出现万向锁现象,静态欧拉角不会出现万向锁现象。
当使用动态欧拉角旋转时,无论3个轴的旋转顺序是什么,只要第二个旋转轴的旋转角度为90度,那么第三个旋转轴(物体坐标系)的旋转效果和第一次旋转轴(世界坐标系)的旋转效果是一样的。这样,旋转系统丢失了一个自由度,原本需要3次旋转表示的旋转变成了2次。这被称为奇异性问题。实际上,只要想用三个实数来表达三维旋转,都会不可避免的遇到奇异性问题,这点有点类似于经纬度的表示,当维度为±90°时,经度没有意义。
口头描述:
万向锁,英文名gimbal clock,是使用动态欧拉角表示旋转时会出现的问题。具体是什么问题呢,当使用动态欧拉角表示旋转的时候,不管旋转顺序如何,当第二个旋转轴旋转90°时,第一次旋转和第三次旋转的效果是一样的,也就是说旋转系统丢失了一个自由度(一个由3次旋转才能表示的旋转变成2次就是表示),这就是万向锁问题。也被称为奇异性问题。
10.4 四元数
定义:四元数是简单的超复数。超复数的意思是一个实数加三个复数。
意义:用四元数可以用来表示旋转,相对于欧拉角这种有奇异性的三维向量描述方式,四元数可以避免万向锁问题。
意义:① 增量旋转
② 避免万向锁问题
③ 给定方位的表达方式有两种,互为负(欧拉角有无数种表达方式)
10.4.1 加法
10.4.2 乘法
10.4.3 模长


10.4.4 共轭
10.4.5 逆


若有收获,就点个赞吧
0 人点赞
