AI PyTorch
最常见的神经网络错误:
1)没有首先尝试过拟合单个batch。
2)忘了为网络设置train/eval模式。
3)在.backward()之前忘记了.zero_grad()(在pytorch中)。
4)将softmaxed输出传递给了期望原始logits的损失,还有其他吗?
逐点分析这些错误是如何在PyTorch代码示例中体现出来的。
代码:https://github.com/missinglinkai/common-nn-mistakes
常见错误 #1 没有首先尝试过拟合单个batch
应该过拟合单个batch。为什么?当过拟合了单个batch —— 实际上是在确保模型在工作。不想在一个巨大的数据集上浪费了几个小时的训练时间,只是为了发现因为一个小错误,它只有50%的准确性。当模型完全记住输入时,会得到的结果是对其最佳表现的很好的预测。
可能最佳表现为零,因为在执行过程中抛出了一个异常。但这没关系,因为很快就能发现问题并解决它。总结一下,为什么应该从数据集的一个小子集开始过拟合:
- 发现bug
- 估计最佳的可能损失和准确率
- 快速迭代
在PyTorch数据集中,通常在dataloader上迭代。第一个尝试可能是索引train_loader。
# TypeError: 'DataLoader' object does not support indexingfirst_batch = train_loader[0]
会立即看到一个错误,因为DataLoaders希望支持网络流和其他不需要索引的场景。所以没有getitem方法,这导致了[0]操作失败,然后会尝试将其转换为list,这样就可以支持索引。
# slow, wastefulfirst_batch = list(train_loader)[0]
但这意味着要评估整个数据集这会消耗的时间和内存。那么还能尝试什么呢?
在Python for循环中,当输入如下:
for item in iterable:do_stuff(item)
有效地得到了这个:
iterator = iter(iterable)try:while True:item = next(iterator)do_stuff(item)except StopIteration:pass
调用“iter”函数来创建迭代器,然后在循环中多次调用该函数的“next”来获取下一个条目。直到完成时,StopIteration被触发。在这个循环中,只需要调用next, next, next… 。为了模拟这种行为但只获取第一项,可以使用这个:
first = next(iter(iterable))
调用“iter”来获得迭代器,但只调用“next”函数一次。注意,为了清楚起见,将下一个结果分配到一个名为“first”的变量中。把这叫做“next-iter” trick。在下面的代码中,可以看到完整的train data loader的例子:
for batch_idx, (data, target) in enumerate(train_loader):# training code here<br>
下面是如何修改这个循环来使用 first-iter trick :
first_batch = next(iter(train_loader))for batch_idx, (data, target) in enumerate([first_batch] * 50):# training code here
可以看到将“first_batch”乘以了50次,以确保会过拟合。
常见错误 #2: 忘记为网络设置 train/eval 模式
为什么PyTorch关注是训练还是评估模型?最大的原因是dropout。这项技术在训练中随机去除神经元。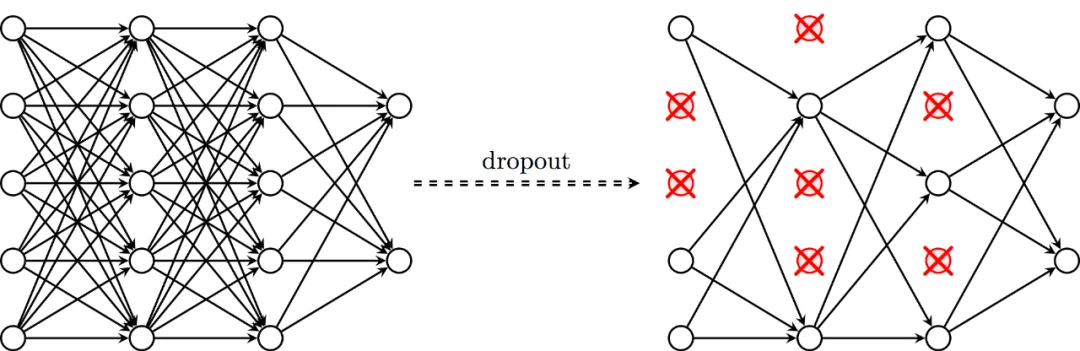
想象一下,如果右边的红色神经元是唯一促成正确结果的神经元。一旦移除红色神经元,它就迫使其他神经元训练和学习如何在没有红色的情况下保持准确。这种drop-out提高了最终测试的性能 —— 但它对训练期间的性能产生了负面影响,因为网络是不全的。在运行脚本并查看MissingLink dashobard的准确性时,请记住这一点。
在这个特定的例子中,似乎每50次迭代就会降低准确度。
如果检查一下代码 —— 可以看到确实在train函数中设置了训练模式。
def train(model, optimizer, epoch, train_loader, validation_loader):model.train() # ????????????for batch_idx, (data, target) in experiment.batch_loop(iterable=train_loader):data, target = Variable(data), Variable(target)# Inferenceoutput = model(data)loss_t = F.nll_loss(output, target)# The iconic grad-back-step triooptimizer.zero_grad()loss_t.backward()optimizer.step()if batch_idx % args.log_interval == 0:train_loss = loss_t.item()train_accuracy = get_correct_count(output, target) * 100.0 / len(target)experiment.add_metric(LOSS_METRIC, train_loss)experiment.add_metric(ACC_METRIC, train_accuracy)print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(epoch, batch_idx, len(train_loader),100. * batch_idx / len(train_loader), train_loss))with experiment.validation():val_loss, val_accuracy = test(model, validation_loader) # ????????????experiment.add_metric(LOSS_METRIC, val_loss)experiment.add_metric(ACC_METRIC, val_accuracy)
这个问题不太容易注意到,在循环中调用了test函数。
def test(model, test_loader):model.eval()# ...
在test函数内部,将模式设置为eval!这意味着,如果在训练过程中调用了test函数,就会进eval模式,直到下一次train函数被调用。这就导致了每一个epoch中只有一个batch使用了drop-out ,这就导致了看到的性能下降。
修复很简单 —— 将model.train() 向下移动一行,让如训练循环中。理想的模式设置是尽可能接近推理步骤,以避免忘记设置它。修正后,训练过程看起来更合理,没有中间的峰值出现。请注意,由于使用了drop-out ,训练准确性会低于验证准确性。
常用的错误 #3: 忘记在.backward()之前进行.zero_grad()
当在 “loss”张量上调用 “backward” 时,是在告诉PyTorch从loss往回走,并计算每个权重对损失的影响有多少,也就是这是计算图中每个节点的梯度。使用这个梯度,可以最优地更新权值。
这是它在PyTorch代码中的样子。最后的“step”方法将根据“backward”步骤的结果更新权重。从这段代码中可能不明显的是,如果一直在很多个batch上这么做,梯度会爆炸,使用的step将不断变大。
output = model(input) # forward-passloss_fn.backward() # backward-passoptimizer.step() # update weights by an ever growing gradient ????????????
为了避免step变得太大,使用 zero_grad 方法。
output = model(input) # forward-passoptimizer.zero_grad() # reset gradient ????loss_fn.backward() # backward-passoptimizer.step() # update weights using a reasonably sized gradient ????
这可能感觉有点过于明显,但它确实赋予了对梯度的精确控制。有一种方法可以确保没有搞混,那就是把这三个函数放在一起:
- zero_grad
- backward
- step
在代码例子中,在完全不使用zero_grad的情况下。神经网络开始变得更好,因为它在改进,但梯度最终会爆炸,所有的更新变得越来越垃圾,直到网络最终变得无用。
调用backward之后再做zero_grad。什么也没有发生,因为擦掉了梯度,所以权重没有更新。剩下的唯一有变化的是dropout。
在每次step方法被调用时自动重置梯度是有意义的。
在backward的时候不使用zero_grad的一个原因是,如果每次调用step() 时都要多次调用backward,例如,如果每个batch只能将一个样本放入内存中,那么一个梯度会噪声太大,想要在每个step中聚合几个batch的梯度。另一个原因可能是在计算图的不同部分调用backward —— 但在这种情况下,也可以把损失加起来,然后在总和上调用backward。
常见错误 #4: 把做完softmax的结果送到了需要原始logits的损失函数中
logits是最后一个全连接层的激活值。softmax也是同样的激活值,但是经过了标准化。logits值,可以看到有些是正的,一些是负的。而log_softmax之后的值,全是负值。如果看柱状图的话,可以看到分布式一样的,唯一的差别就是尺度,但就是这个细微的差别,导致最后的数学计算完全不一样了。但是为什么这是一个常见的错误呢?在PyTorch的官方MNIST例子中,查看forward 方法,在最后可以看到最后一个全连接层self.fc2,然后就是log_softmax。
但是当查看官方的PyTorch resnet或者AlexNet模型的时候,会发现这些模型在最后并没有softmax层,最后得到就是全连接的输出,就是logits。
这两个的差别在文档中没有说的很清楚。如果查看nll_loss函数,并没有提得输入是logits还是softmax,唯一希望是在示例代码中发现nll_loss使用了log_softmax作为输入。

若有收获,就点个赞吧
0 人点赞
