矩阵定义补充:
单位矩阵:
在矩阵的乘法中,有一种矩阵起着特殊的作用,如同数的乘法中的1,这种矩阵被称为单位矩阵。它是个方阵,从左上角到右下角的对角线(称为主对角线)上的元素均为1。除此以外全都为0。
正交矩阵:
如果AAT=E(E为单位矩阵,AT表示“矩阵A的转置矩阵”)或ATA=E,则n阶实矩阵A称为正交矩阵。
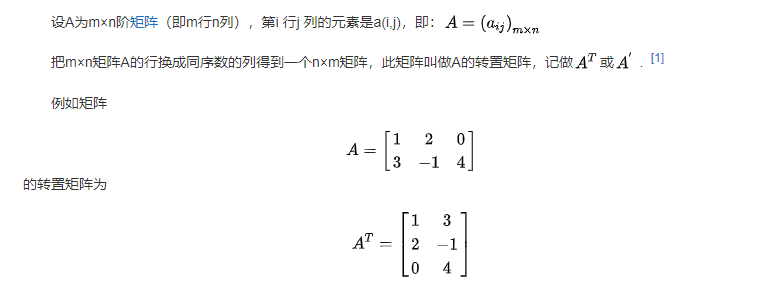
矩阵转置:
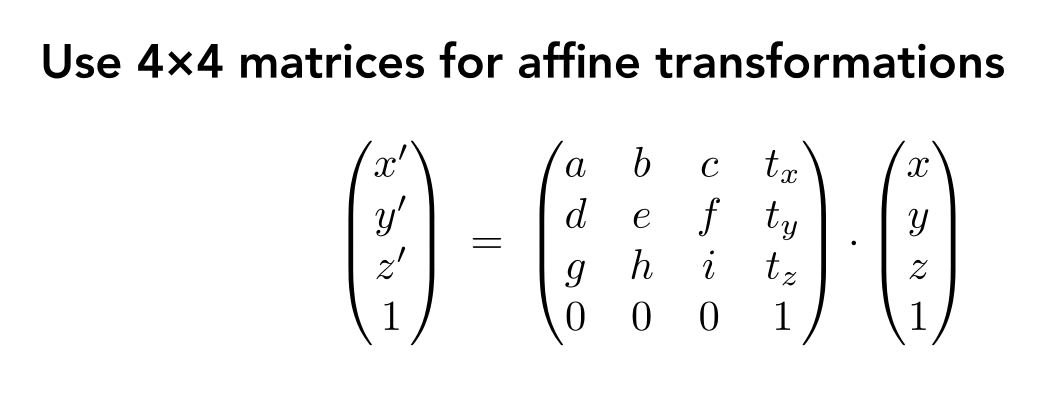
1.矩阵3D变换:
1.1缩放平移矩阵:
2.2旋转矩阵变换:
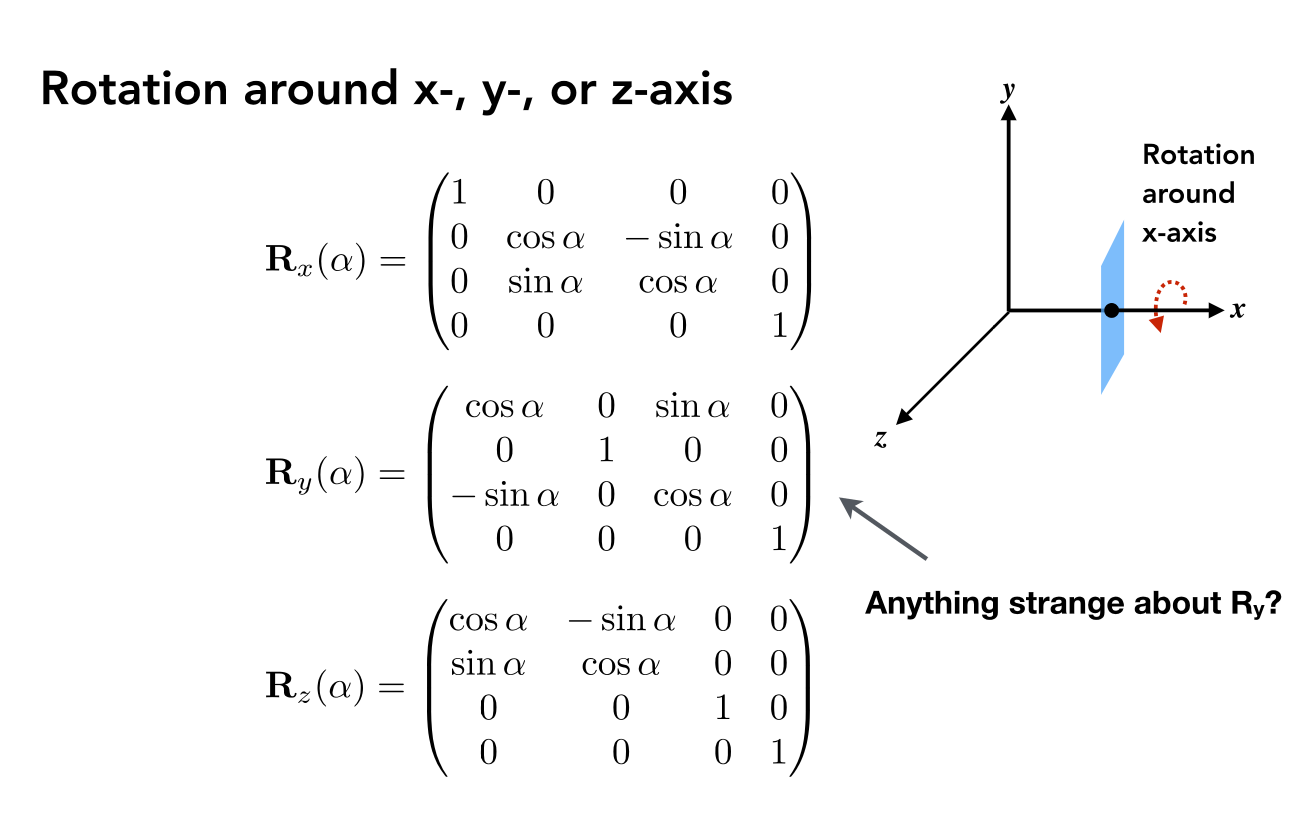
Ry 为 负的原因:
Rx为y叉乘z
Rz为x叉乘y
而Ry为z叉乘x,根据:
右手定则:XYZ按顺序叉乘,结果为正。按反序叉乘,结果为负。
左手定则:XYZ按顺序叉乘,结果为负。按反序叉乘,结果为正。
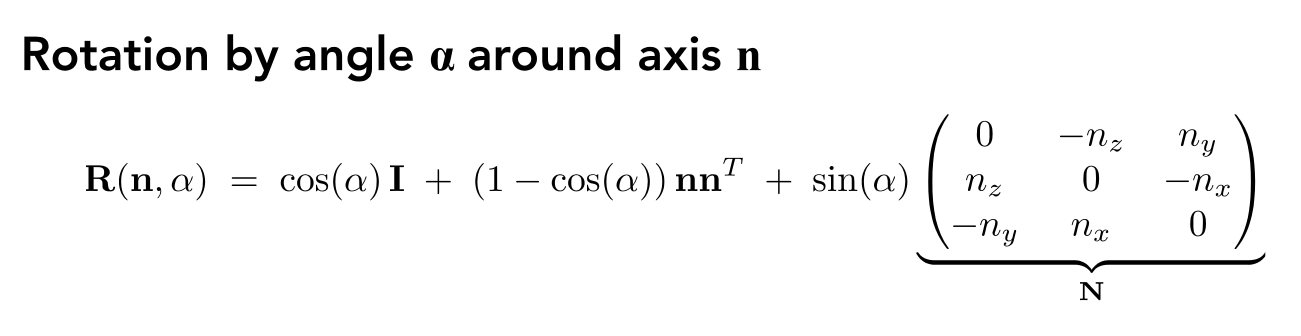
2.3在任意轴旋转变换:
2.4四元数:
旋转矩阵没法计算差值
比如说,旋转20度的矩阵和旋转40度的矩阵相加求平均并不是旋转30度的矩阵
四元数就是为了解决这个问题的。
3.Viewing transformation观测变换:
3.1观测相机:
观测顺序:1.确定相机位置(确定相机坐标系原点)
2.确定视角变换(确定摄像头朝向,即确定z轴方向)
3.确定相机抬头方向(确定摄像头旋转角度,即确定相机y轴方向)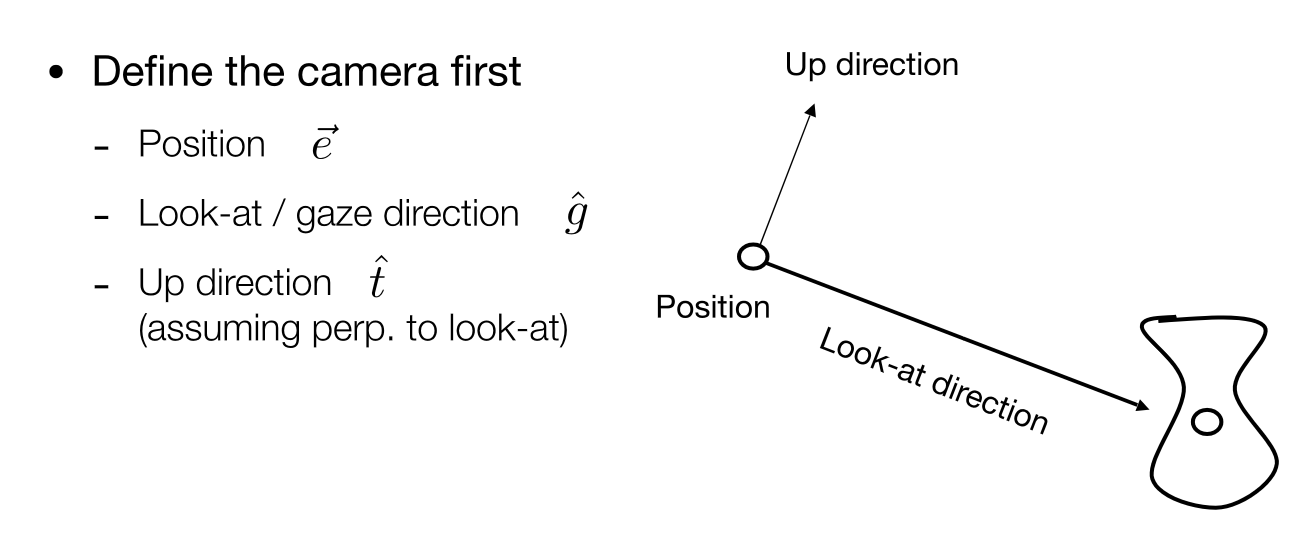
观测相机用矩阵表示: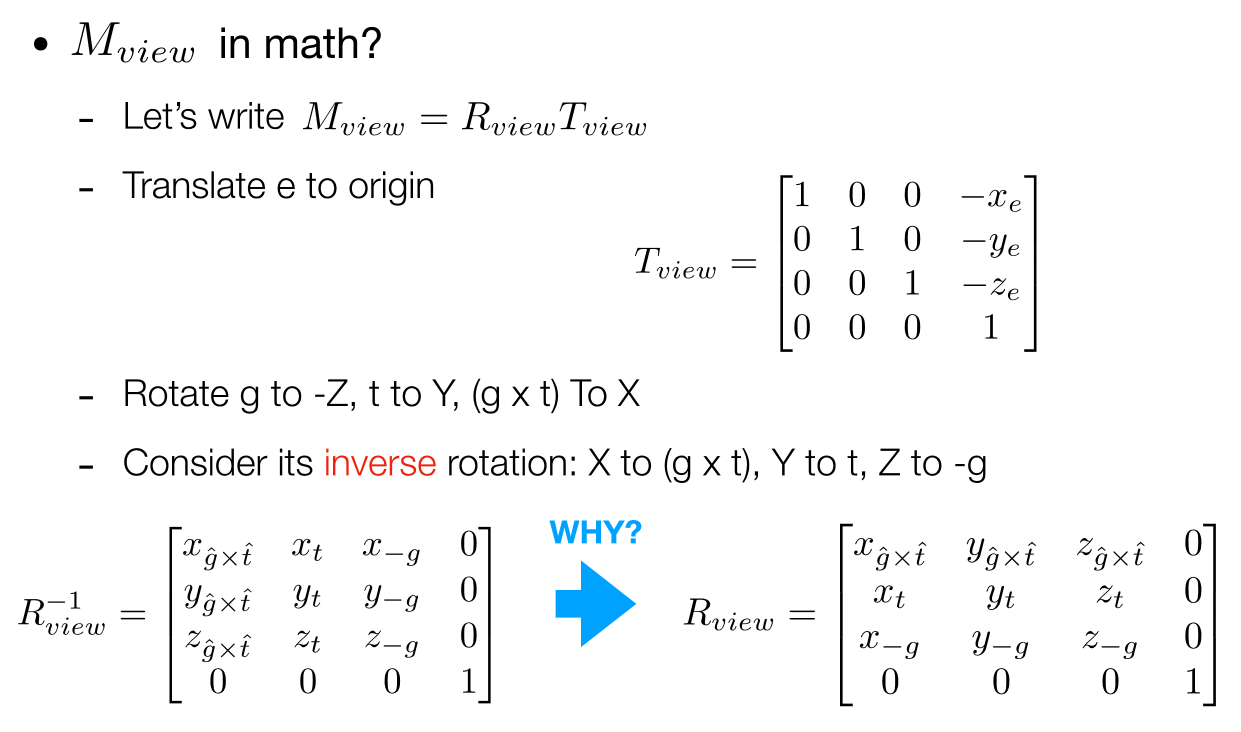
WHY?
因为正交矩阵的逆矩阵等于它的转置矩阵。
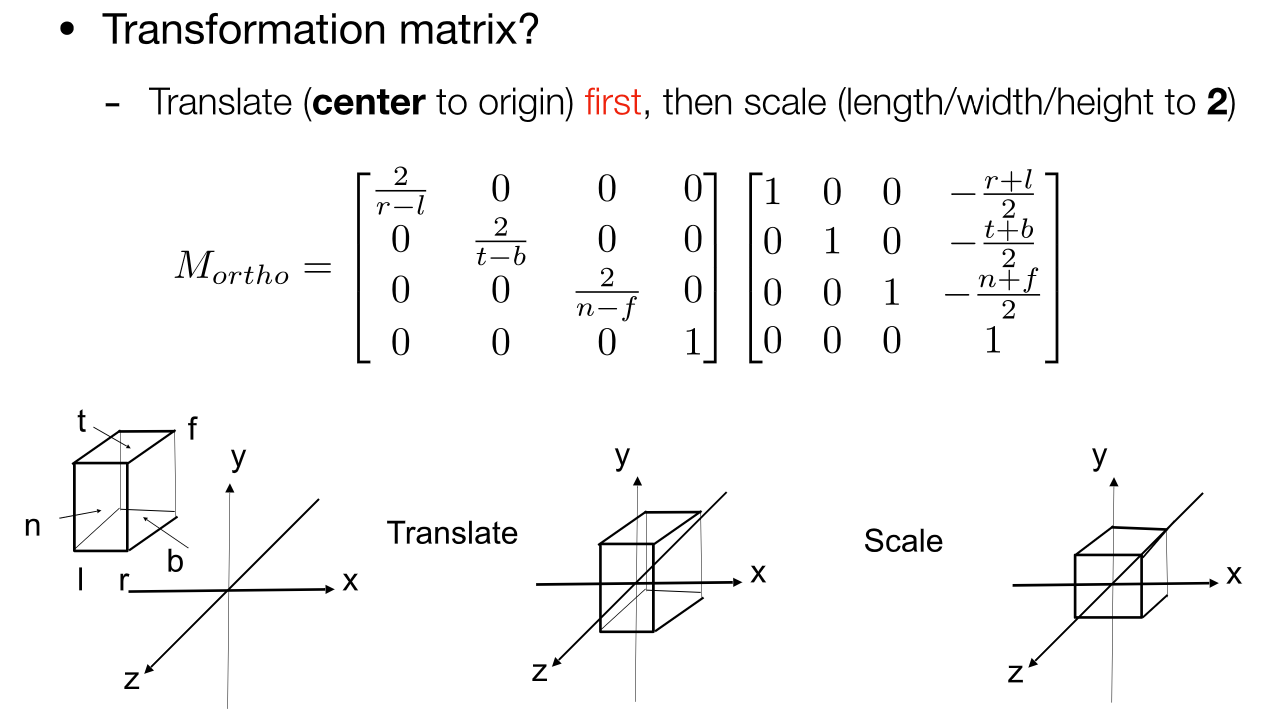
3.2正交投影:
正交投影可以理解为将相机拉到无限远,没有近大远小变换。
在空间中亦可以理解为去掉图像点的z轴信息: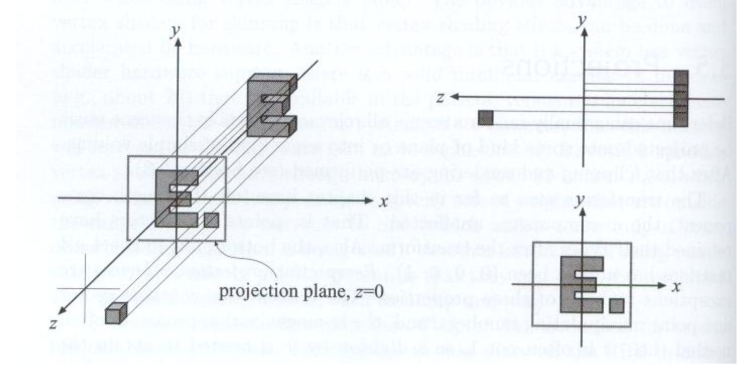
正式的做法:
把一个cuboid [l,r] x [b,t] x [f,n] (左右,下上,远近)映射到一个 canonical(正则、规范、标准) cube [-1,1]3
顺序先平移再缩放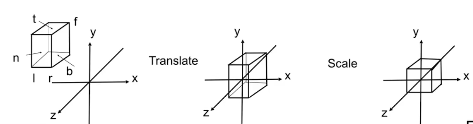
这里重点看远近平面,因为我们是右手系,从-Z看,所以物体越远,值越小,越近,值越大(归一化前)
所以远值<近值
3.3透视投影:
透视投影可以理解为先把远平面压缩为显示平面大小,然后进行正交投影。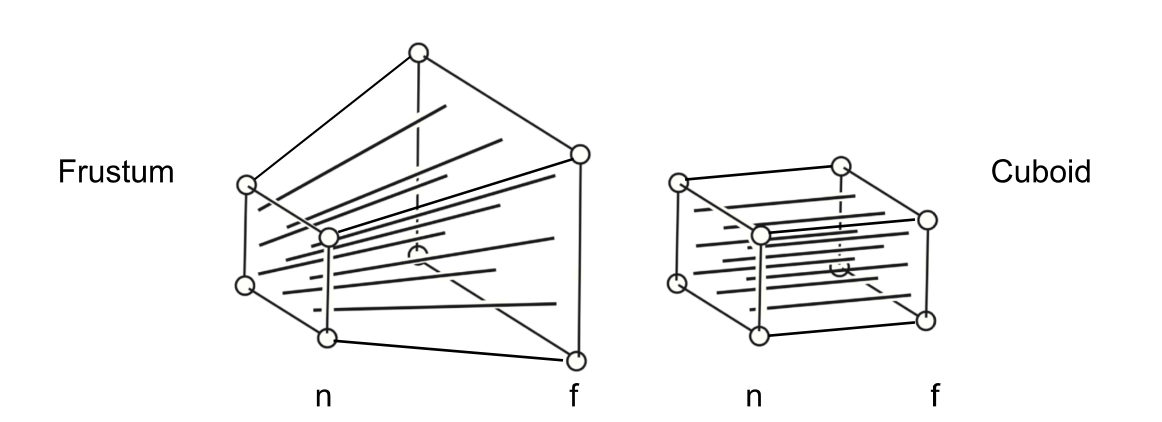
坐标压缩方法: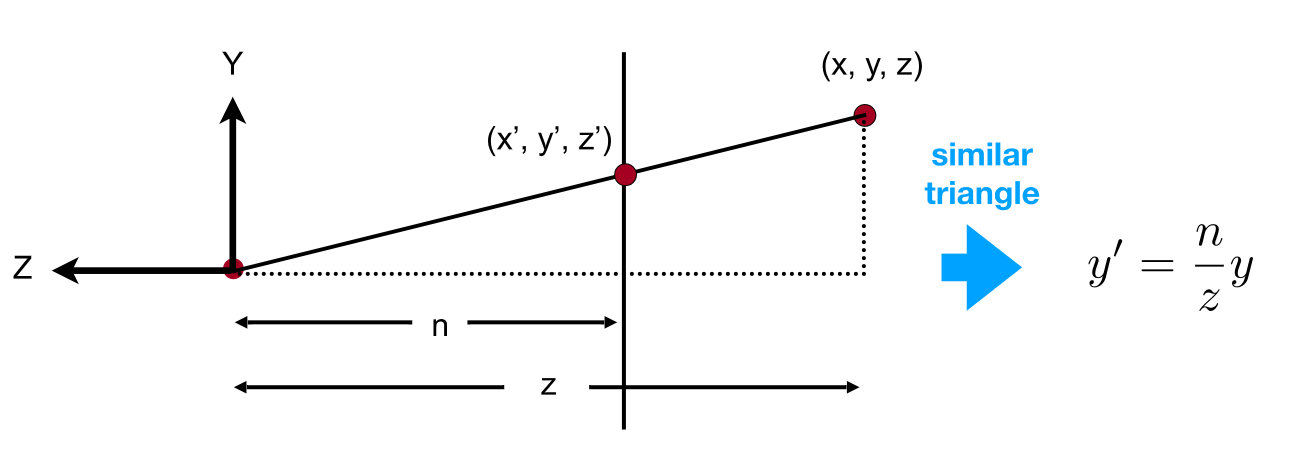
压缩后的坐标为: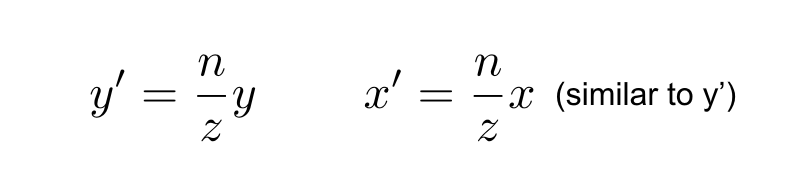
压缩后的坐标写成矩阵,然后同乘z(齐次坐标定义):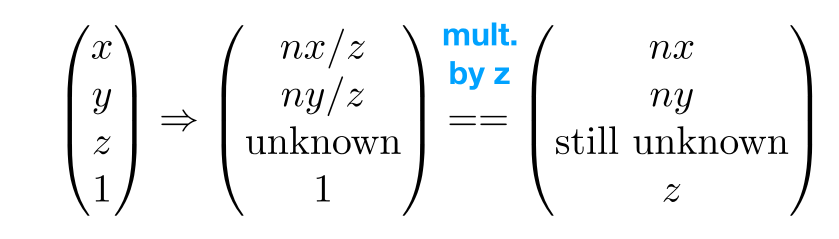
最后得到: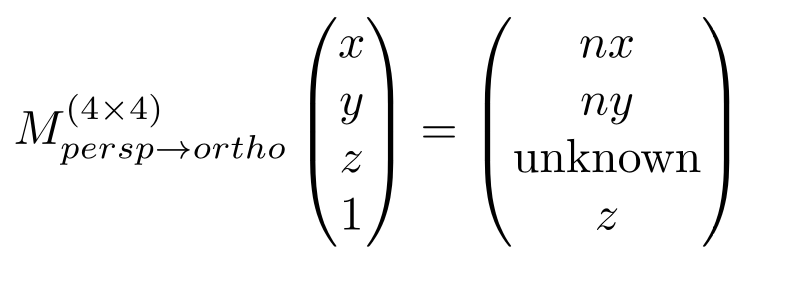
在远平面压缩中,中心点以及z的位置是不变的,可以以此解决unknow的值:
z值不变,所以把z值替换为n,再乘n: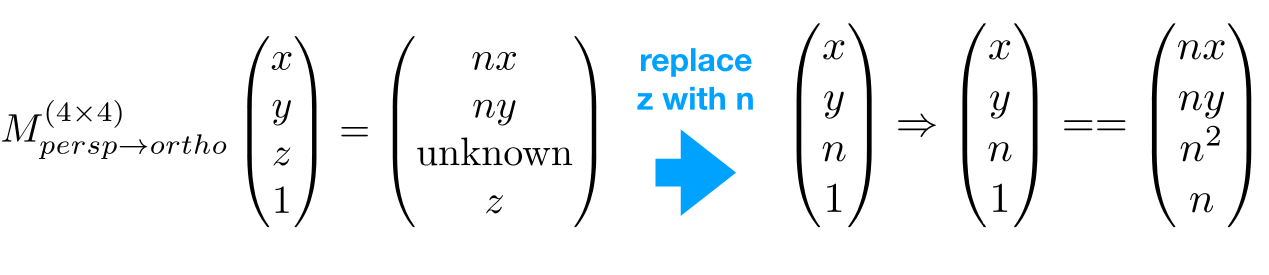
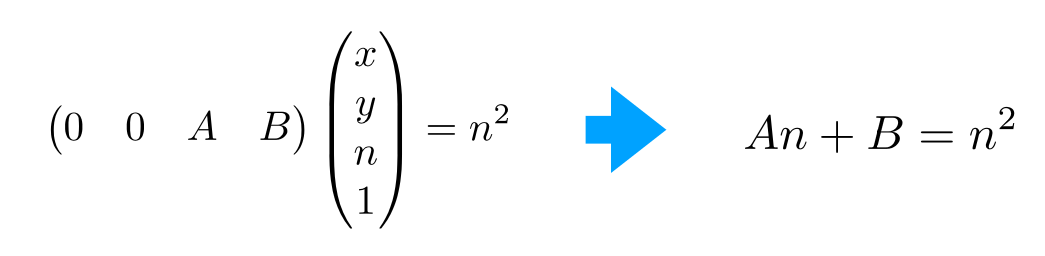
未知行第三行,可以表示为(AB为未知值):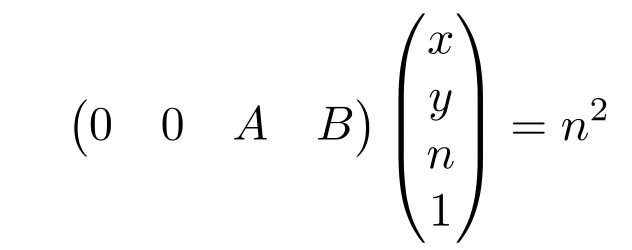
远平面中心点在缩放后是不变的,并且坐标同乘f: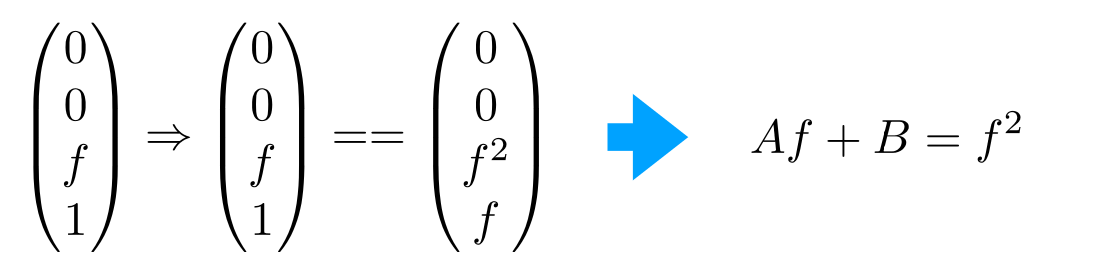
结合得到: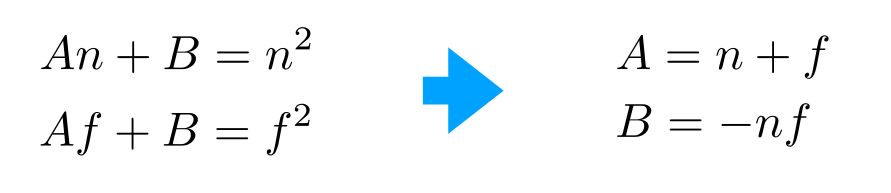
所以补充完第三行:
所以
最后得到这就是透视投影变换矩阵:

注意,这里得到的还是w = z 的齐次坐标
还需要做透视除法

若有收获,就点个赞吧
0 人点赞
